学习笔记-ResNet网络
ResNet网络
- ResNet原理和实现
- 总结
一、ResNet原理和实现
神经网络第一次出现在1998年,当时用5层的全连接网络LetNet实现了手写数字识别,现在这个模型已经是神经网络界的“helloworld”,一些能够构建神经网络的库比如TensorFlow、keras等等会把这个模型当成第一个入门例程。后来卷积神经网络(Convolutional Neural Networks, CNN)一出现就秒杀了全连接神经网络,用卷积核代替全连接,大大降低了参数个数,网络因此也能延伸到十几层到二十几层,2012年的8层AlexNet获得ILSVRC 2012比赛冠军,2014年22层的GooLeNet获得ILSVRC 2014亚军,19层VGG获得亚军,但层数也只能到这了,因为研究者们发现:随着网络层级的不断增加,模型精度不断得到提升,而当网络层级增加到一定的数目以后,训练精度和测试精度迅速下降,这说明当网络变得很深以后,深度网络就变得更加难以训练了。为什么?
这得从神经网络的传播算法开始说起。神经网络用反向传播算法通过计算参数的梯度,从而将总误差E分配到各个待调整的参数w上,以此来指导参数的更新。但如果层数过高(比如二十层),梯度变化值会逐渐衰减,以sigmoid函数为例,由于其求导结果等于f(x) *(1-f(x)),且其值域为(0,1),这意味着导数值小于等于0.25,而每经过一层神经元,都要再上一个偏导数的基础上乘以这个求导结果,因此每经过一层,误差就会衰减为原来的至少0.25倍,显然只需经过十几层二十几层,误差就会变的极小以至于趋近于0,这就是限制网络深度的问题之一:梯度消失。而在另一种极端情况下,每层计算出的梯度值即使乘以f(x) *(1-f(x))后仍然大于1,梯度值以指数级增加最终溢出,这是梯度爆炸。正是这两个问题导致梯度变得不稳定,网络难以训练了。
梯度消失和梯度爆炸都有一定的缓解方法,比如换成使用ReLU函数作为激活函数,或者是在每层输入之后添加正则化层。正则化可以使数据分布重新回到标准正态分布,在数学上解释为“防止输入分布变动”,一定程度上解决了梯度消失问题,也提高了训练速度和收敛速度,网络因此能训练到几十层。
但是即使用了正则化等手段,随着层数加深,但神经网络在训练集的准确度仍然会发生饱和甚至精度下降的问题。这个问题无法解释为过拟合,因为过拟合是在训练集上的准确率很高,在测试集上要低。而现在是神经网络在训练集上的准确率都下降了。研究者把这种现象称之为网络退化。
如何解决退化问题?Kaiming He等人做了实验:假设现有一个浅层网络已达到了饱和的准确率,这时在它后面再加上几个恒等映射层(输入=输出的层),这样可以增加网络的深度,并且误差不应该增加。而实验结果不是这样,这说明现有的神经网络似乎很难学习恒等映射函数,也就是去拟合y=x。残差网络就是为了解决这个问题而诞生的:让神经网络具有学习恒等映射的能力。如果神经网络的某一层被训练为恒等映射层,那么这层是否存在对结果不会有影响。换句话说,如果神经网络能学习恒等映射,那么网络就具有了自行选择是否需要某层神经的能力。(思路上似乎与dropout层有一定的共性,只不过dropout层更笨一些:随机使得一定比例的神经元失效来减小过拟合效果。)
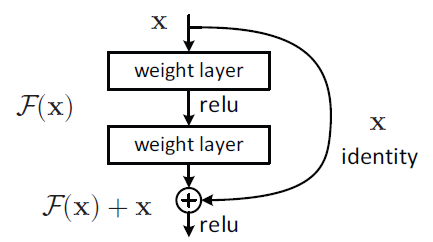
那么残差网络是如何实现学习恒等映射的能力呢?目标函数是H(x)=x,其中H(x)是神经网络。如果把目标函数设计为H(x)=F(x) + x,当F(x)=0时就能构成一个恒等映射。转换一下我们需要学F(x) = H(x) - x。按照论文中给出的图,具体的残差层可以这样设计:(这个图不够直观,下面我会画一个更直观的)
举个例子:输入 , 经过拟合后的输出为
,那么残差就是
;
假设 从
经过两层卷积层之后变为
,普通网络模块相比较于之前的输出,其变化率为
,而残差模块的变化率为
放大变化有助于网络更加敏感,学得更快。如何放大变化?减去基数x,只让网络学习在x上所叠加的波动,也就是残差。如果把残差层画的更清晰一点,应该是这样的: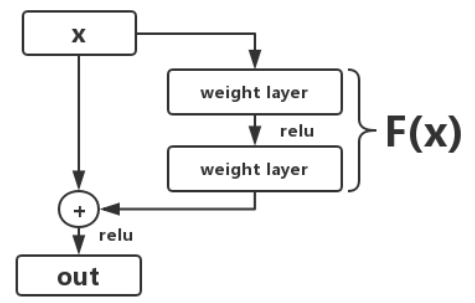
通过上图我们更容易理解,残差网络将要学习叠加在输入x上的波动信息,这也是残差网络为什么称之为残差网络:残差就是波动。将波动与输入x本身分割开来,这能使得残差网络更容易学习与输入本身无关的、更一般的特征。
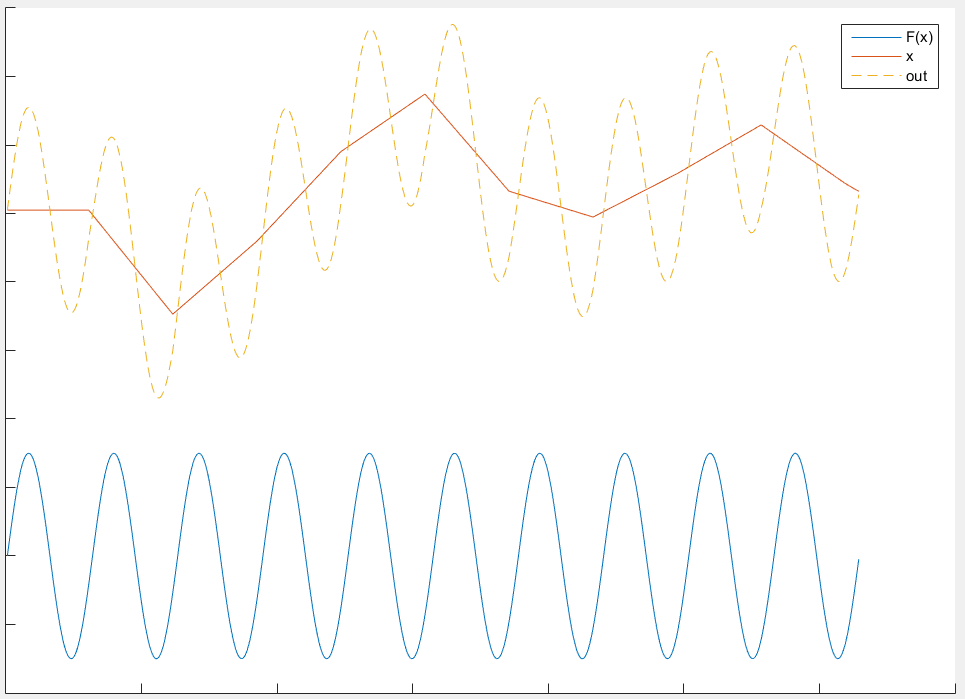
这个图更直观的表现为什么残差是“输入本身无关的、更一般的特征”。普通的网络只能直接学习橙色虚线(神经网络的输出结果),但如果在输出结果中减去输入x得到残差曲线(蓝色实线)后再学习,可以预见网络将更快的收敛,精度也会更高。
回忆前面所说的“学习恒等映射”,在残差网络结构中,这个问题就转换为“学习获得0输出”,神经网络更擅长拟合这类非线性问题。
这部分的实现体现在下面的代码中,其中考虑了一个细节问题:如果输入与输出的通道数相同,则将输入的x与输出结果进行相加作为下一层的输出;如果输入与输出的图像的通道数不同,那么输入将会经过一个分支层(conv->bn)转换其通道数,再与输出相加。
downsample = None # 在前后通道数不一样的时候,对输入进行conv->bn来变换通道数,与输出相加,实现残差结构 if (stride != 1) or (self.in_channels != out_channels): downsample = nn.Sequential(nn.Conv2d(self.in_channels, out_channels,kernel_size=3, stride=stride, padding=1,bias=False), nn.BatchNorm2d(out_channels))
def forward(self, input): # input->conv1->bn1->relu->conv2->bn2=out->out+input->out x = input out = self.conv1(input) out = self.bn1(out) out = self.relu(out) out = self.conv2(out) out = self.bn2(out) # F(x)+ x 部分,当输入输出通道数一样,则直接与输入相加,不一样则经过conv->bn来变换通道数再相加。 if self.downsample: x = self.downsample(input) out = out + x # F(x)+ x out = self.relu(out) # 经过relu return out
为什么加x而不是x/2等其他形式?这个问题再何凯明大神的另一篇文章里提到了,如果x前有系数λ会导致梯度里多一项![]() ,反向传播的时候碰上极端情况(all λ>1)会导致梯度爆炸,而(all λ<1)会使得网络退化为普通网络,所以只能是1,更详细的解释和实验都在链接里。
,反向传播的时候碰上极端情况(all λ>1)会导致梯度爆炸,而(all λ<1)会使得网络退化为普通网络,所以只能是1,更详细的解释和实验都在链接里。
到这里,残差网络的学习就差不多了,我借用两个大神的代码实现了18层的残差网络,结构图如下:

最后附上全部代码(使用Pytorch框架,强烈推荐):


import torch # 1.0.1 import torch.nn as nn import torchvision # 0.2.2 import torchvision.transforms as transforms # 图像预处理模块 transform = transforms.Compose([transforms.Pad(4), transforms.RandomHorizontalFlip(), transforms.RandomCrop(32), transforms.ToTensor()]) # CIFAR-10 dataset train_dataset = torchvision.datasets.CIFAR10(root='./data', train=True, transform=transform, download=True) test_dataset = torchvision.datasets.CIFAR10(root='./data', train=False, transform=transforms.ToTensor()) # Data loader train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=100, shuffle=True) test_loader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=100, shuffle=False) # 残差块 conv->BN->relu->conv->BN class ResidualBlock(nn.Module): def __init__(self, in_channels, out_channels, stride=1, downsample=None): super(ResidualBlock, self).__init__() # 继承父类init() # print("---------------残差块开始-------------------------") self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False) self.bn1 = nn.BatchNorm2d(out_channels) self.relu = nn.ReLU(inplace=True) self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1, bias=False) self.bn2 = nn.BatchNorm2d(out_channels) self.downsample = downsample # print("---------------残差块结束-------------------------") def forward(self, input): # input->conv1->bn1->relu->conv2->bn2=out->out+input->out x = input out = self.conv1(input) out = self.bn1(out) out = self.relu(out) out = self.conv2(out) out = self.bn2(out) # F(x)+ x 部分,当输入输出通道数一样,则直接与输入相加,不一样则经过conv->bn来变换通道数再相加。 if self.downsample: x = self.downsample(input) out = out + x # F(x)+ x out = self.relu(out) # 经过relu return out # ResNet class ResNet(nn.Module): def __init__(self, block, layers, num_classes=10): super(ResNet, self).__init__() self.in_channels = 64 # 输入通道 self.conv = nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1, bias=False) self.bn = nn.BatchNorm2d(64) # BN self.relu = nn.ReLU(inplace=True) # relu self.layer1 = self.make_layer(block, 64, layers[0], 1) self.layer2 = self.make_layer(block, 128, layers[1], 2) self.layer3 = self.make_layer(block, 256, layers[2], 2) self.layer4 = self.make_layer(block, 512, layers[3], 2) self.avg_pool = nn.AvgPool2d(4) # 平均池化 self.fc = nn.Linear(512, num_classes) def make_layer(self, block, out_channels, blocks, stride=1): downsample = None # 在前后通道数不一样的时候,对输入进行conv->bn来变换通道数,与输出相加,实现残差结构 if (stride != 1) or (self.in_channels != out_channels): downsample = nn.Sequential(nn.Conv2d(self.in_channels, out_channels, kernel_size=3, stride=stride, padding=1,bias=False), nn.BatchNorm2d(out_channels)) layers = [] # 声明list layers.append(block(self.in_channels, out_channels, stride, downsample)) # 构建残差模块 # print(self.in_channels, out_channels, stride) self.in_channels = out_channels # 把输出通道设为输入通道 for i in range(1, blocks): # 只运行了一次 blocks=2 layers.append(block(out_channels, out_channels)) # 构建16输入 16输出的残差模块 return nn.Sequential(*layers) # 把网络层按序添加到模型 def forward(self, input): out = self.conv(input) out = self.bn(out) out = self.relu(out) out = self.layer1(out) out = self.layer2(out) # print(out.shape) out = self.layer3(out) out = self.layer4(out) out = self.avg_pool(out) out = out.view(out.size(0), -1) out = self.fc(out) return out if __name__ == '__main__': device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')# 设置GPU torch.set_num_threads(8) # 设定用于并行化CPU操作的OpenMP线程数 windows环境下必须在main函数下运行,不然报错 # 0.定义参数 num_epochs = 1 learning_rate = 0.001 # 1.搭建网络 model = ResNet(ResidualBlock, [2, 2, 2, 2]).to(device) # 模型迁移到GPU运行 # # 查看每层参数 # for name, parameters in model.named_parameters(): # print(name, ':', parameters.size()) # # tensorboard 查看模型结构 # rand_input = torch.rand(100, 3, 32, 32) # with SummaryWriter(comment="network") as w: # w.add_graph(model,rand_input.to(device)) # 2.定义损失和优化器 criterion = nn.CrossEntropyLoss() # 交叉熵损失 optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate) # adam优化 # 3.训练模型 total_step = len(train_loader) # 训练步长 curr_lr = learning_rate for epoch in range(num_epochs): for i, (images, labels) in enumerate(train_loader): images = images.to(device) labels = labels.to(device) # print(images.shape) # print(labels) # exit() outputs = model(images) # 前向传播 loss = criterion(outputs, labels) # 计算损失 optimizer.zero_grad() # 梯度清零 loss.backward() # 后向传播 optimizer.step() # 参数更新 if (i + 1) % 100 == 0: print("Epoch [{}/{}], Step [{}/{}] Loss: {:.4f}" .format(epoch + 1, num_epochs, i + 1, total_step, loss.item())) # 每20周期 学习率下降为原来的三分之一 if (epoch + 1) % 20 == 0: curr_lr /= 3 for param_group in optimizer.param_groups: param_group['lr'] = curr_lr # 4.测试模型 model.eval() # 测试模式 # eval()时,pytorch会自动把BN和DropOut固定住,不会取平均,而是用训练好的值。 # 不然的话,一旦test的batch_size过小,很容易就会被BN层导致生成图片颜色失真极大。 with torch.no_grad(): # 无需计算梯度 correct = 0 total = 0 for images, labels in test_loader: images = images.to(device) labels = labels.to(device) outputs = model(images) _, predicted = torch.max(outputs.data, 1) total += labels.size(0) correct += (predicted == labels).sum().item() print('Accuracy of the model on the test images: {} %'.format(100 * correct / total)) # 5.保存模型及参数 torch.save(model.state_dict(), 'resnet.ckpt')
代码里含有tensorboard的相关函数,用于网络结构的可视化,不需要可以注释掉。
二、总结
残差网络的设计简洁漂亮,把输出分解为输入+残差,将神经网络的学习重心全部转移到残差上,使得网络更专注的学习与输入无关的、更一般的特征。这就是残差网络的成功原因。
参考文献
梯度消失、爆炸 https://blog.csdn.net/u011734144/article/details/80164927
Batch Normalization 批标准化 https://www.cnblogs.com/guoyaohua/p/8724433.html
理解ResNet: https://www.cnblogs.com/alanma/p/6877166.html
https://blog.csdn.net/bryant_meng/article/details/81187434
https://blog.csdn.net/sunqiande88/article/details/80100891
使用TensorFlow、keras、theano、pytorch框架搭建神经网络:莫烦老师的神经网络教程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号