

OpenCVSharp:使用霍夫变换检测直线
概述
霍夫变换(Hough Transform)是一种强大的计算机视觉技术,用于检测图像中的特定几何形状(如直线、圆形、椭圆等)。它通过将图像空间中的点映射到参数空间,将形状检测问题转换为参数空间中的峰值检测问题。对于直线检测,霍夫变换将图像中的每个边缘点映射到参数空间(ρ,θ)中的一条曲线,其中ρ表示直线到原点的距离,θ表示直线的角度。当多条曲线在参数空间中相交于同一点时,表明图像中存在对应的直线。这种方法的优点是对噪声和部分遮挡具有鲁棒性,能够检测不完整的形状,因此在道路检测、工业检测和文档分析等领域有广泛应用。
实践
// 读取图像
using var imgGray = new Mat(ImagePath, ImreadModes.Grayscale);
using var imgStd = new Mat(ImagePath, ImreadModes.Color);
using var imgProb = imgStd.Clone();
if (imgGray.Empty())
{
MessageBox.Show("无法加载图像", "错误", MessageBoxButton.OK, MessageBoxImage.Error);
return;
}
// 预处理 - Canny边缘检测
var sw = new Stopwatch();
sw.Start();
Cv2.Canny(imgGray, imgGray, CannyThreshold1, CannyThreshold2, 3, false);
sw.Stop();
CannyTime = $"Canny边缘检测耗时: {sw.ElapsedMilliseconds} 毫秒 (阈值1={CannyThreshold1}, 阈值2={CannyThreshold2})";
CannyImage = ConvertMatToBitmapImage(imgGray);
// 运行标准霍夫变换
sw.Start();
LineSegmentPolar[] segStd = Cv2.HoughLines(imgGray, 1, Math.PI / 180, (int)HoughThreshold, 0, 0);
sw.Stop();
int limit = Math.Min(segStd.Length, 10);
for (int i = 0; i < limit; i++)
{
// 绘制结果线条
float rho = segStd[i].Rho;
float theta = segStd[i].Theta;
double a = Math.Cos(theta);
double b = Math.Sin(theta);
double x0 = a * rho;
double y0 = b * rho;
Point pt1 = new Point { X = (int)Math.Round(x0 + 1000 * (-b)), Y = (int)Math.Round(y0 + 1000 * (a)) };
Point pt2 = new Point { X = (int)Math.Round(x0 - 1000 * (-b)), Y = (int)Math.Round(y0 - 1000 * (a)) };
imgStd.Line(pt1, pt2, Scalar.Red, 3, LineTypes.AntiAlias, 0);
}
StandardHoughTime = $"标准霍夫变换耗时: {sw.ElapsedMilliseconds} 毫秒 (检测到 {segStd.Length} 条线)";
StandardHoughImage = ConvertMatToBitmapImage(imgStd);
// 运行概率霍夫变换
sw.Restart();
LineSegmentPoint[] segProb = Cv2.HoughLinesP(imgGray, 1, Math.PI / 180, (int)HoughThreshold, (int)MinLineLength, (int)MaxLineGap);
sw.Stop();
foreach (LineSegmentPoint s in segProb)
{
imgProb.Line(s.P1, s.P2, Scalar.Red, 3, LineTypes.AntiAlias, 0);
}
ProbabilisticHoughTime = $"概率霍夫变换耗时: {sw.ElapsedMilliseconds} 毫秒 (检测到 {segProb.Length} 条线)";
ProbabilisticHoughImage = ConvertMatToBitmapImage(imgProb);
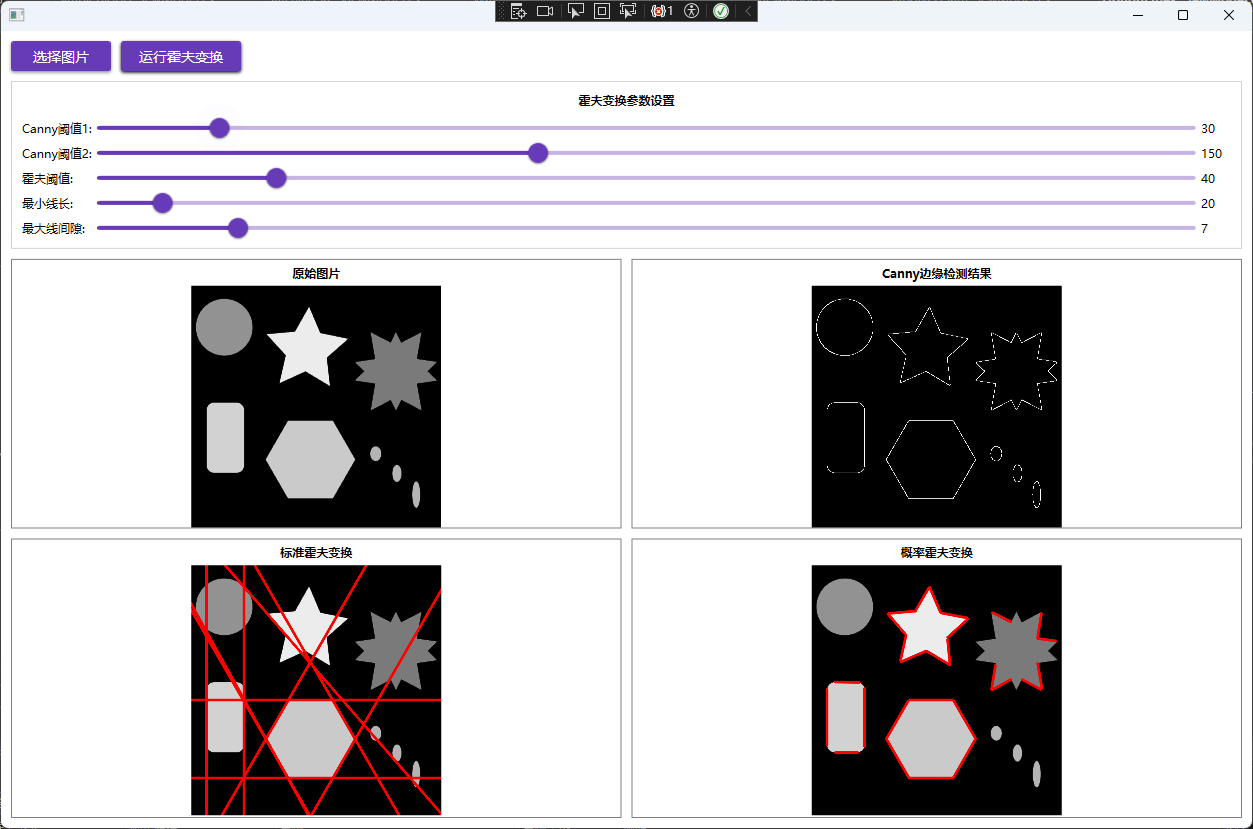
这个过程包含读取图像、Canny边缘检测、霍夫变换与概率霍夫变换。
Canny边缘检测
Canny边缘检测是一种多级边缘检测算法,由John F. Canny在1986年提出,被广泛认为是计算机视觉中最优秀的边缘检测方法之一。该算法通过四个主要步骤实现:首先使用高斯滤波器平滑图像以减少噪声,然后计算图像梯度的幅值和方向,接着应用非极大值抑制来细化边缘(保留梯度方向上的局部最大值),最后使用双阈值处理和滞后阈值技术来连接边缘并消除假边缘。Canny算法的优势在于它能够产生细而连续的边缘,具有良好的信噪比和定位精度,并且能够有效检测弱边缘,因此在图像分割、特征提取和物体识别等计算机视觉任务中得到广泛应用。
查看Cv2.Canny方法签名:
public static void Canny(InputArray src, OutputArray edges,
double threshold1, double threshold2, int apertureSize = 3, bool L2gradient = false)
查看参数:
| 参数名 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| src | InputArray | 无 | 单通道8位输入图像(通常为灰度图像) |
| edges | OutputArray | 无 | 输出边缘图,与输入图像具有相同尺寸和类型的二值图像 |
| threshold1 | double | 无 | 滞后阈值过程的第一个阈值(低阈值),用于边缘连接 |
| threshold2 | double | 无 | 滞后阈值过程的第二个阈值(高阈值),用于强边缘检测 |
| apertureSize | int | 3 | Sobel算子的孔径大小(3、5或7),决定梯度计算的核大小 |
| L2gradient | bool | false | 梯度幅值计算方法:true使用L2范数,false使用L1范数 |
阈值选择建议
典型比例:threshold2 ≈ 2-3 × threshold1
低阈值(threshold1):通常设置为50-100
高阈值(threshold2):通常设置为150-200
霍夫变换
霍夫变换(Hough Transform)是一种强大的计算机视觉技术,用于检测图像中的特定几何形状(如直线、圆形、椭圆等)。它通过将图像空间中的点映射到参数空间,将形状检测问题转换为参数空间中的峰值检测问题。对于直线检测,霍夫变换将图像中的每个边缘点映射到参数空间(ρ,θ)中的一条曲线,其中ρ表示直线到原点的距离,θ表示直线的角度。当多条曲线在参数空间中相交于同一点时,表明图像中存在对应的直线。
查看Cv2.HoughLines的方法签名:
public static LineSegmentPolar[] HoughLines(
InputArray image, double rho, double theta, int threshold,
double srn = 0, double stn = 0)
这是OpenCV中标准霍夫变换函数的实现,用于在二值图像中检测直线。
查看参数:
| 参数名 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| image | InputArray | 无 | 8位单通道二值源图像,函数可能会修改此图像 |
| rho | double | 无 | 累加器的距离分辨率(像素单位) |
| theta | double | 无 | 累加器的角度分辨率(弧度单位) |
| threshold | int | 无 | 累加器阈值参数,只有获得足够投票数(>threshold)的直线才会被返回 |
| srn | double | 0 | 多尺度霍夫变换中距离分辨率rho的除数 |
| stn | double | 0 | 多尺度霍夫变换中角度分辨率theta的除数 |
注意看这个方法返回的是LineSegmentPolar[],LineSegmentPolar是OpenCV中用于表示极坐标直线的结构体。
| 属性名 | 类型 | 说明 |
|---|---|---|
| Rho | float | 直线的长度(从原点到直线的距离) |
| Theta | float | 直线的角度(弧度) |
得到的这个数组如下所示:
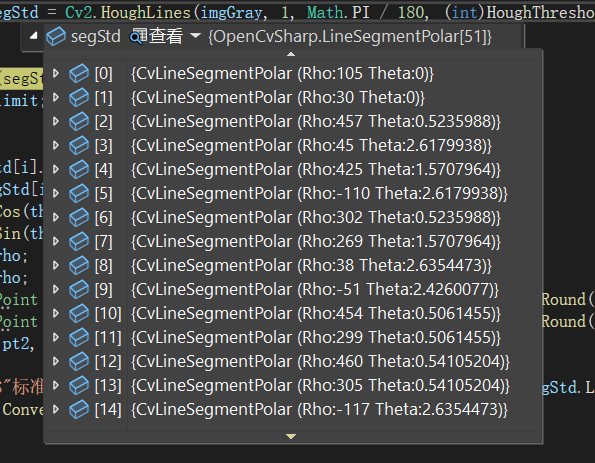
那么我们就要将霍夫变换检测到的极坐标直线转换为笛卡尔坐标,并在图像上绘制这些直线。
概率霍夫变换
概率霍夫变换(Probabilistic Hough Transform)是标准霍夫变换的一种优化改进版本,它通过随机采样和概率统计的方法大幅提高了直线检测的计算效率。与标准霍夫变换检测无限长直线不同,概率霍夫变换直接检测有限长度的线段,并返回线段的两个端点坐标,使结果更加实用。该算法通过最小线长和最大线间隙参数控制检测质量,只保留满足长度要求且连接性良好的线段,同时利用随机梯度上升策略减少计算量,使其在处理大图像或实时应用场景中具有明显优势,特别适用于道路检测、文档分析等需要快速准确检测线段的实际应用。
查看Cv2.HoughLinesP的方法签名:
public static LineSegmentPoint[] HoughLinesP(
InputArray image, double rho, double theta, int threshold,
double minLineLength = 0, double maxLineGap = 0)
这是OpenCV中概率霍夫变换函数的实现,用于在二值图像中检测线段。
查看参数:
| 参数名 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| image | InputArray | 无 | 8位单通道二值源图像 |
| rho | double | 无 | 累加器的距离分辨率(像素单位) |
| theta | double | 无 | 累加器的角度分辨率(弧度单位) |
| threshold | int | 无 | 累加器阈值参数,只有获得足够投票数的线段才会被返回 |
| minLineLength | double | 0 | 最小线段长度,短于此长度的线段将被拒绝 |
| maxLineGap | double | 0 | 同一条线上点之间的最大允许间隙,用于连接断开的线段 |
返回的是LineSegmentPoint[],这是OpenCV中用于表示笛卡尔坐标线段的结构体,如下图所示:
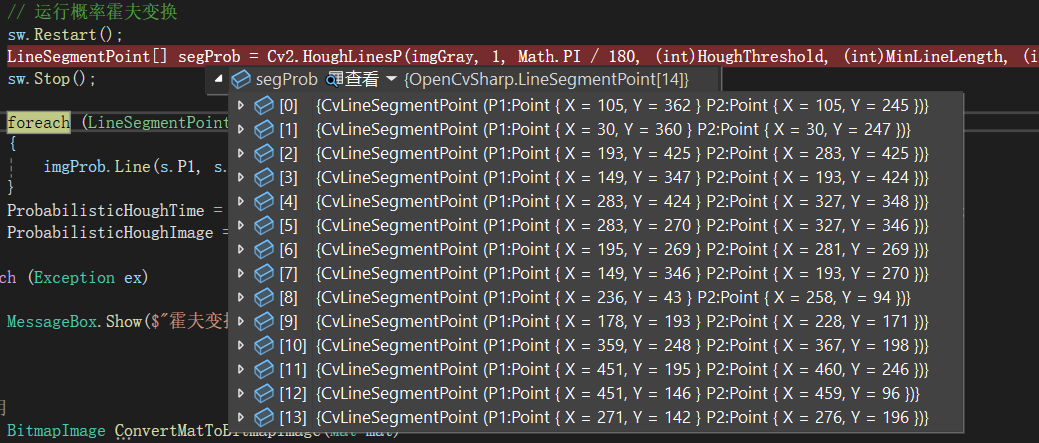
然后使用Line方法绘制直线即可。
查看Line方法的签名:
public void Line(Point pt1, Point pt2, Scalar color, int thickness = 1, LineTypes lineType = LineTypes.Link8, int shift = 0)
查看参数:
| 参数名 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| pt1 | Point | 无 | 线段的第一个端点 |
| pt2 | Point | 无 | 线段的第二个端点 |
| color | Scalar | 无 | 线段颜色 |
| thickness | int | 1 | 线段粗细(像素) |
| lineType | LineTypes | LineTypes.Link8 | 线段类型 |
| shift | int | 0 | 点坐标中的小数位数 |
最后的效果如下所示:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号