

Forgettable.
也不是全部都是容易被遗忘的算法。只是想写一下而已。
Dinic
我不会写 Dinic 啊。我只会写 ISAP。
其实,Dinic 就是从源点出发 BFS,然后改一下 DFS 中的 \(dis\) 判断,然后去掉 GAP 优化而已。令人谔谔。
匈牙利
我不会写匈牙利啊。我只会写 ISAP。匈牙利就是,枚举,找点,递归,打标记。标记不能边回退边清,不然一个度数很大的点可能会被遍历到很多遍,然后会扫很多遍出边,然后复杂度就错了。但是打时间戳就会好很多。令人谔谔。
无源汇上下界可行流
考虑一条边 \((u,v,L,R)\)。我们给这条边预分配 \(L\) 的流量,然后将它的容量设成 \(R-L\),并建立一个虚拟源点 \(S\) 和一个虚拟汇点 \(T\),加上 \((u,T,L)\) 和 \((S,v,L)\) 这两条边,然后以 \(S\) 为源点,\(T\) 为汇点跑普通最大流,然后若 \(S\) 的出边均满流,就找到了一组可行流。
为什么?
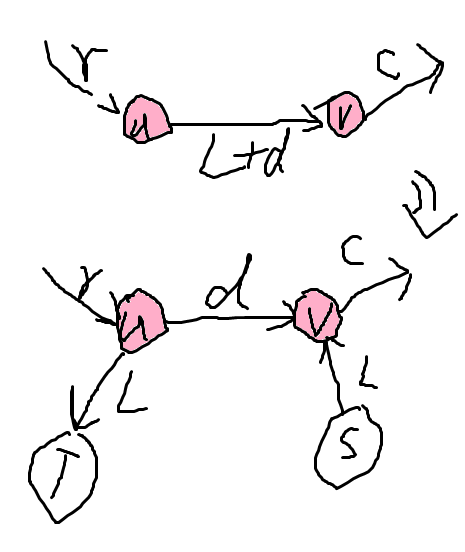
对于一条边 \((u,v,L,R)\) 来说,它在原图的大致情况是上图的上面那一部分,其中 \(r\) 是平凡的入流,\(c\) 是平凡的出流,我们知道,在这样的情况下,它们是流守恒的。然后我们建了上图的下面那一部分的那张图,容易发现,当 \((S,v,L)\) 和 \((u,T,L)\) 满流时,它们也是流守恒的。因此,任意一个原图可行流都对应一个新图最大流,反之亦然,即它们形成了一个双射,所以可以说它们是等价的。(和 \(S\) 或 \(T\) 相关的满流条件是必须满足的。)
然后有了新图,输出方案也是容易的,不阐述了。还有一些东西,不阐述了。
无源汇上下界最大流/最小流
居然网上没多少讲这个东西的文章,那我就来跟大家讲一讲。
首先,我们发现我们还没有定义无源汇网络的最大流/最小流是什么,然后再想一想,发现它们没有什么意义。所以我们就做完了。
代码实现:
有源汇上下界可行流
有源汇网络里,源点 \(S\) 和汇点 \(T\) 是不满足流守恒的。所以可以连接一条 \((T,S,\inf)\) 的边,然后就可以套用无源汇上下界可行流的做法了。容易发现,这个可行流的大小就是 \((T,S,\inf)\) 这条边的流量。
有源汇上下界最大流
先跑可行流,然后删掉 \((T,S,\inf)\),保留残量网络的其余部分,再跑原源点 \(S\) 到原汇点 \(T\) 的最大流,这个最大流加上前面的可行流就是答案。这个是很好理解的,不要把残量想成流量就行了。
有源汇上下界最小流
我不会。等会。
Tarjan
待补。
Exgcd
待补。
Matrix-Tree
待补。
类欧几里得算法
待补。
wqs 二分
待补。
数位 DP
待补。
虚树
待补。
Splay
待补。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号