
【PR】Block-NeRF: Scalable Large Scene Neural View Synthesis
【简介】
本文的作者来自UC Berkeley,Waymo和Google研究院,一听就是大佬。发表在CVPR 2022。
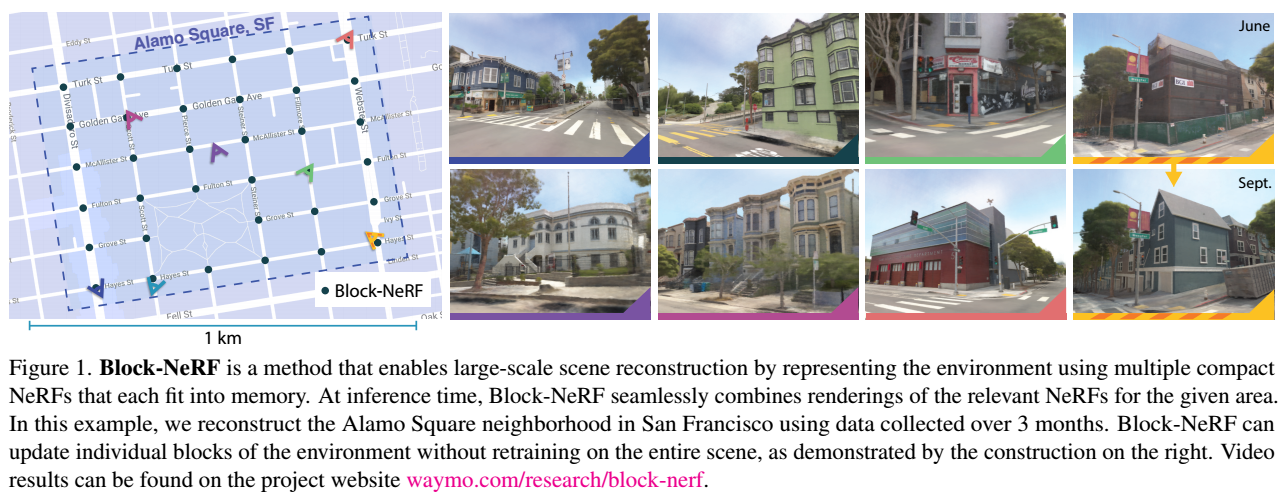
Block-NeRF是一种大规模环境的神经辐射场。当渲染多个街区的大规模城市场景时,Block-NeRF通过将环境分解为多个单独训练的紧凑NeRF来实现大规模场景的表示,这些NeRF在推理时可以无缝地组合渲染。这种方法不仅使得渲染时间与场景大小解耦,还能够渲染任意大小的环境,并且允许对环境中的单个块进行更新。作者为每个单独的NeRF添加了外观嵌入、位姿精细优化和可控曝光,可以校准相邻NeRF之间的外观,从而可以实现无缝结合。作者从280w张图构建了一个Block-NeRFs网络,创建了迄今为止最大的神经辐射场,渲染了旧金山的一整个街区。
【创新点】
1. 将大环境划分为区块单独训练,在推理时动态渲染和组合。
2. 引入外观匹配,将不同block进行视觉对齐。
通过将场景细分,Block-NeRF实现了几个关键优点:
- 可扩展性:通过将大场景拆分成可管理的小块,大大提高了处理大型场景的能力。
- 效率:可以并行处理各个块,进一步提高渲染速度。只需加载并处理当前视角附近块的数据,从而减少了内存和计算资源的需求。
- 灵活性:对于场景中的动态变化,只需更新影响的块而无需重新训练整个场景模型,提高了模型更新的效率。
【review】
【方法】
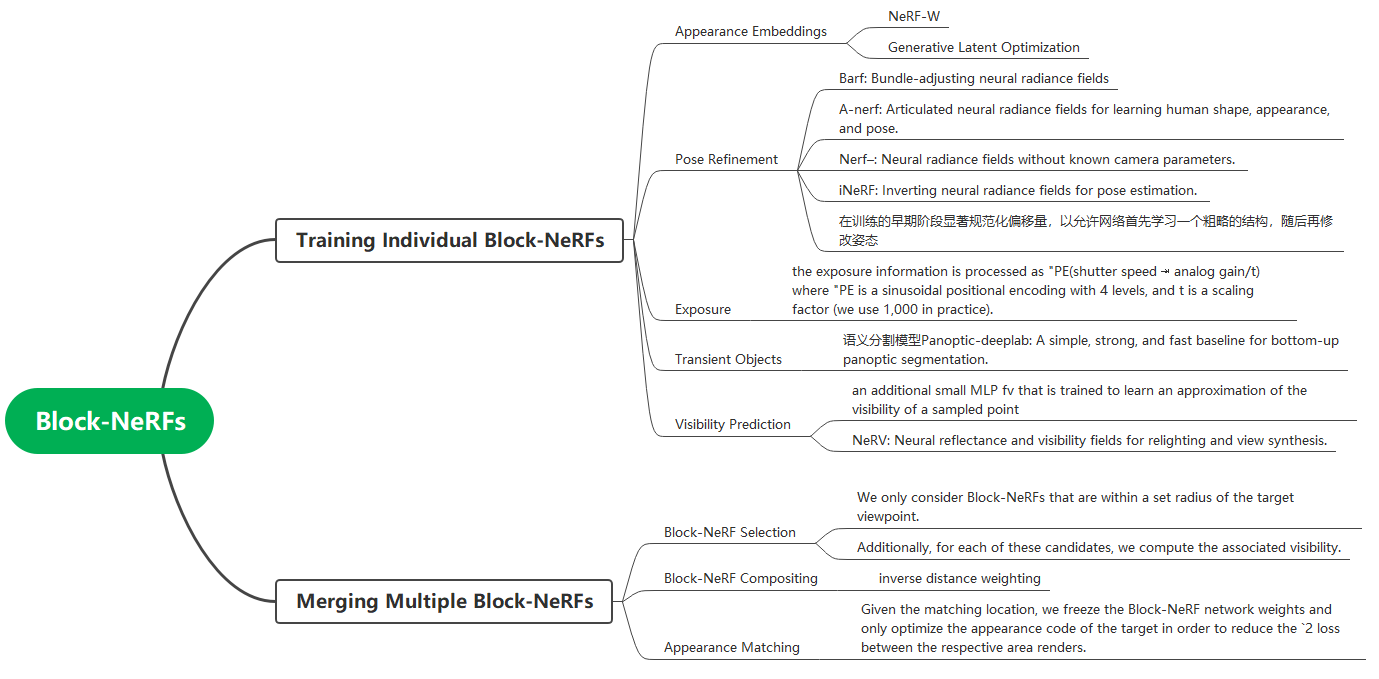
关键技术包括:
- 单独Block-NeRF训练:
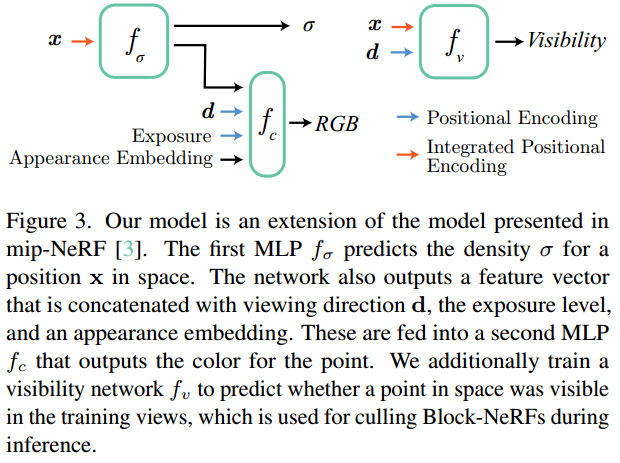
- 外观嵌入:引入外观嵌入来处理不同环境条件下捕获的数据,如天气变化和一天中不同时间的光照条件。
- 学习姿势细化:通过学习相机姿势的细化偏移量来提高数据对齐的准确性。
- 可控曝光:允许在推理期间调整图像的曝光水平,以模拟不同的光照条件。
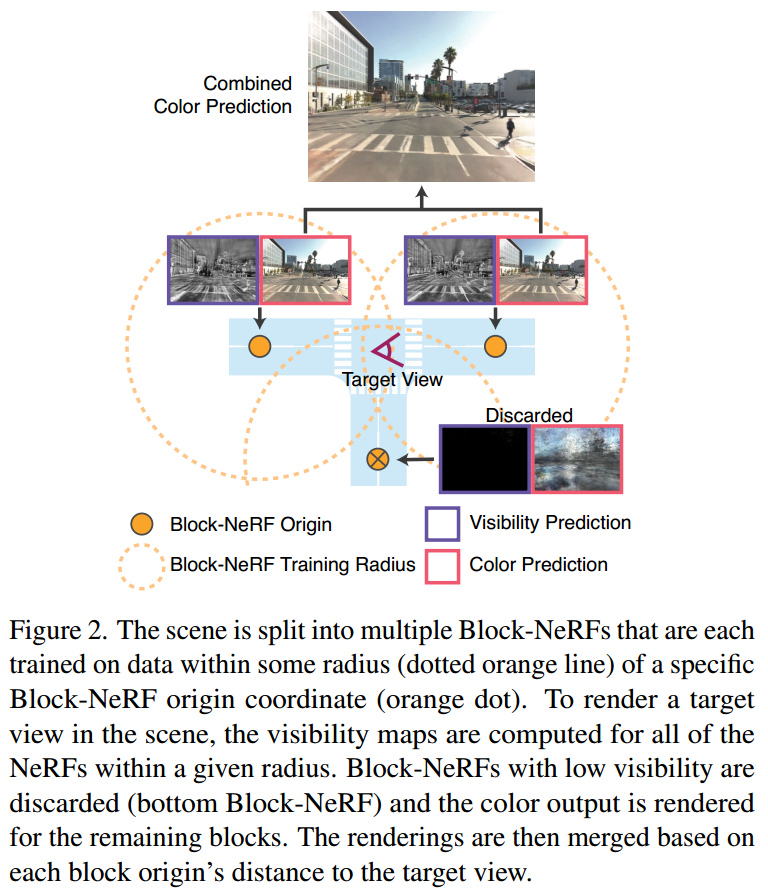
- 可见性预测:通过预测空间中点的可见性来辅助Block-NeRFs的合并,特别是在渲染时决定哪些Block-NeRFs对目标视图有贡献。
- 多Block-NeRF表示:通过将场景分解为多个Block-NeRFs,每个Block-NeRF独立训练,可以在推理时动态组合渲染,从而实现对大规模环境的渲染。
【结论】
最后,尽管Block-NeRF在大规模场景重建方面取得了显著进展,但仍存在一些局限性,如对动态对象的处理、渲染质量和速度的提升空间,以及训练效率的改进。未来的工作可能会集中在这些方面,以及探索如何进一步提高Block-NeRF的实用性和效率。
【参考】
Tancik M, Casser V, Yan X, et al. Block-nerf: Scalable large scene neural view synthesis[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2022: 8248-8258.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号