PID 算法系统详解
PID(Proportional-Integral-Derivative,比例 - 积分 - 微分)算法是工业控制领域应用最广泛的闭环控制算法,其核心作用是通过对比 “目标值(Setpoint, SP)” 与 “实际测量值(Process Value, PV)” 的偏差(Error, E),动态调整控制输出(Manipulated Variable, MV),使实际值快速、稳定地逼近目标值,最终实现无静差、低超调的控制效果。(实际变量名会有所不同,但本质相同)
PID 算法结构简单、鲁棒性强(对系统参数变化不敏感)、易于工程实现,广泛应用于温度控制、电机调速、液位调节、机器人位置跟踪等场景。
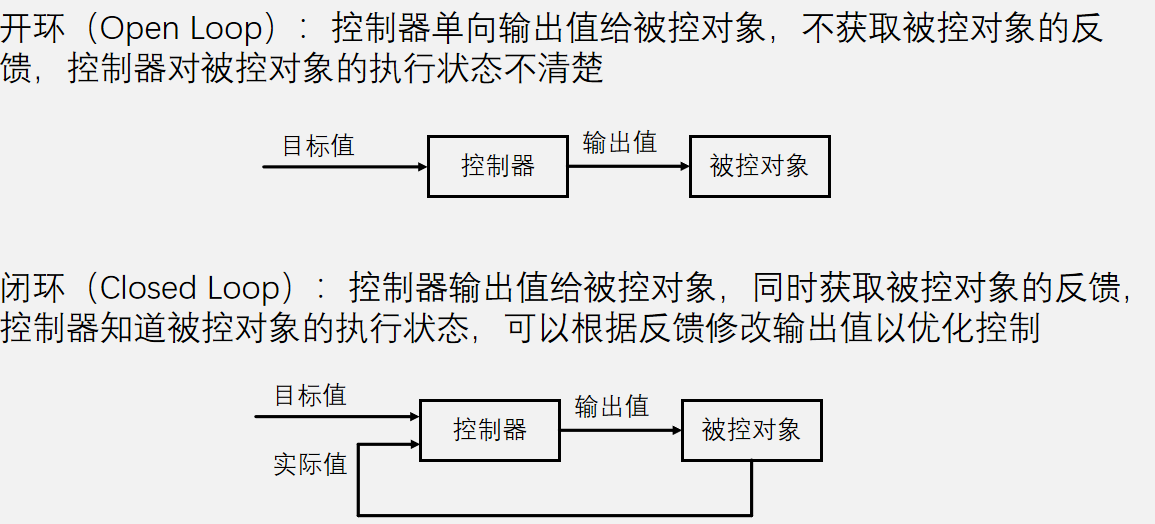
- PID是一种闭环控制算法,它动态改变施加到被控对象的输出值(Out),使得被控对象某一物理量的实际值(Actual),能够快速、准确、稳定地跟踪到指定的目标值(Target)
![]()
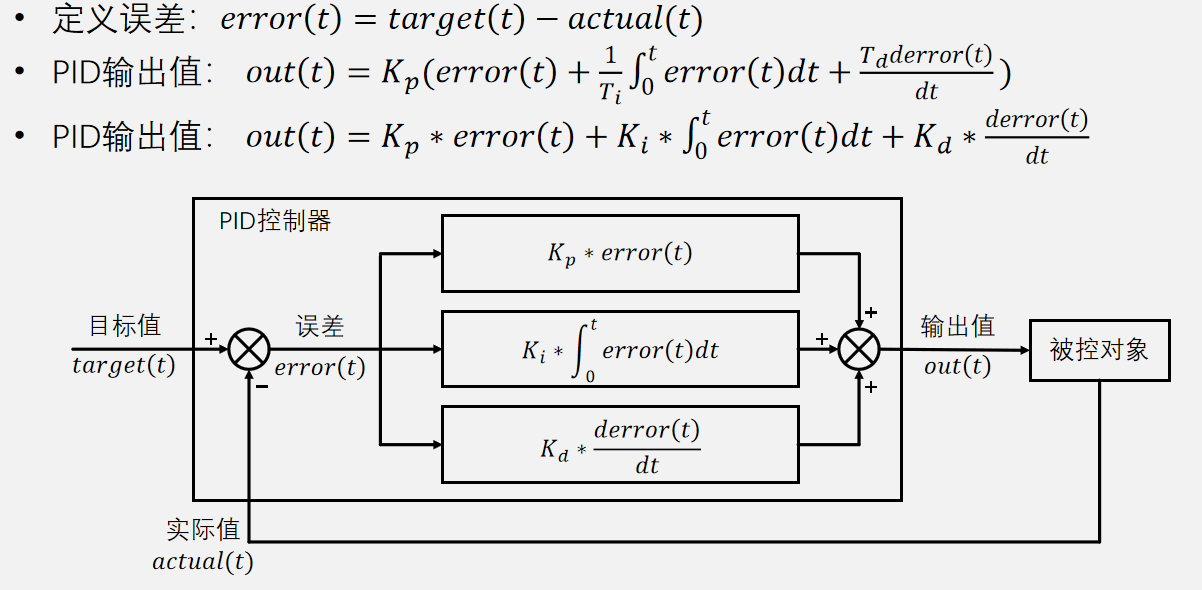
- PID是一种基于误差(Error)调控的算法,其中规定:误差=目标值-实际值,PID的任务是使误差始终为0
![]()
- PID对被控对象模型要求低,无需建模,即使被控对象内部运作规律不明确,PID也能进行调控
PID 的核心逻辑:偏差驱动的 “三作用” 调节
PID 的本质是通过 “比例(P)、积分(I)、微分(D)” 三个环节的协同作用,修正偏差。我们可以用 “洗澡水温度控制” 类比理解:
- 目标水温(SP):40℃,实际水温(PV):30℃,偏差(E)= 40-30=10℃。
- P 作用:根据当前偏差直接调大热水阀(偏差越大,阀门开得越大);
- I 作用:如果 P 作用后水温仍未到 40℃(有静差),则根据过去一段时间的偏差累积,继续缓慢开大阀门,直到偏差消除;
- D 作用:如果水温突然快速升高(比如偏差从 10℃骤降到 2℃),则提前关小阀门,避免水温超过 40℃(抑制超调)。
通过以下博客我们会系统的讲解一下这“P” “I” “D”

 浙公网安备 33010602011771号
浙公网安备 33010602011771号