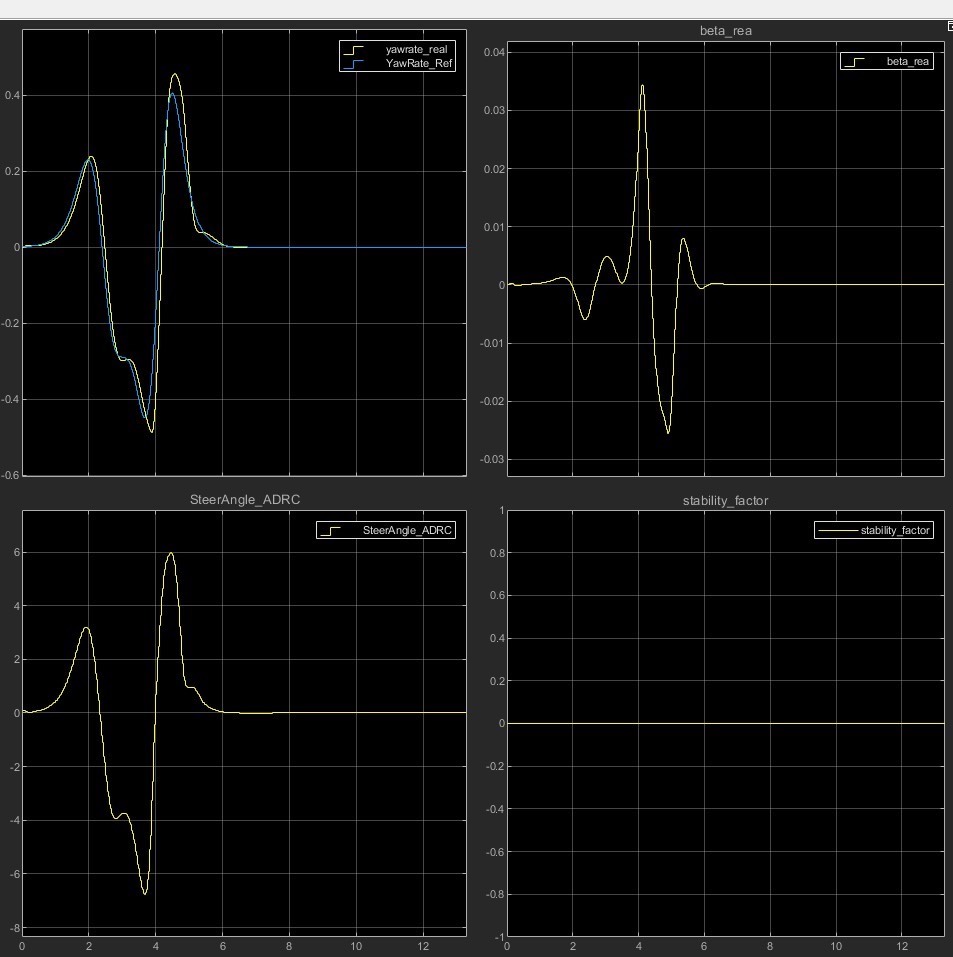
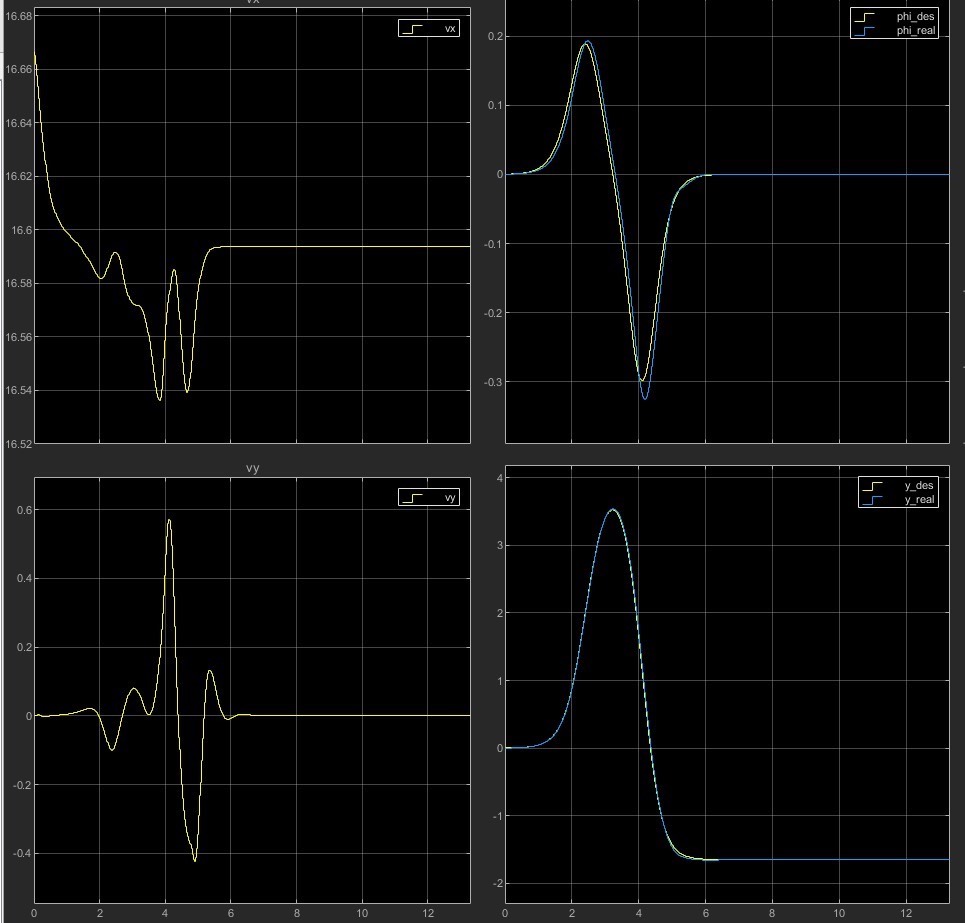
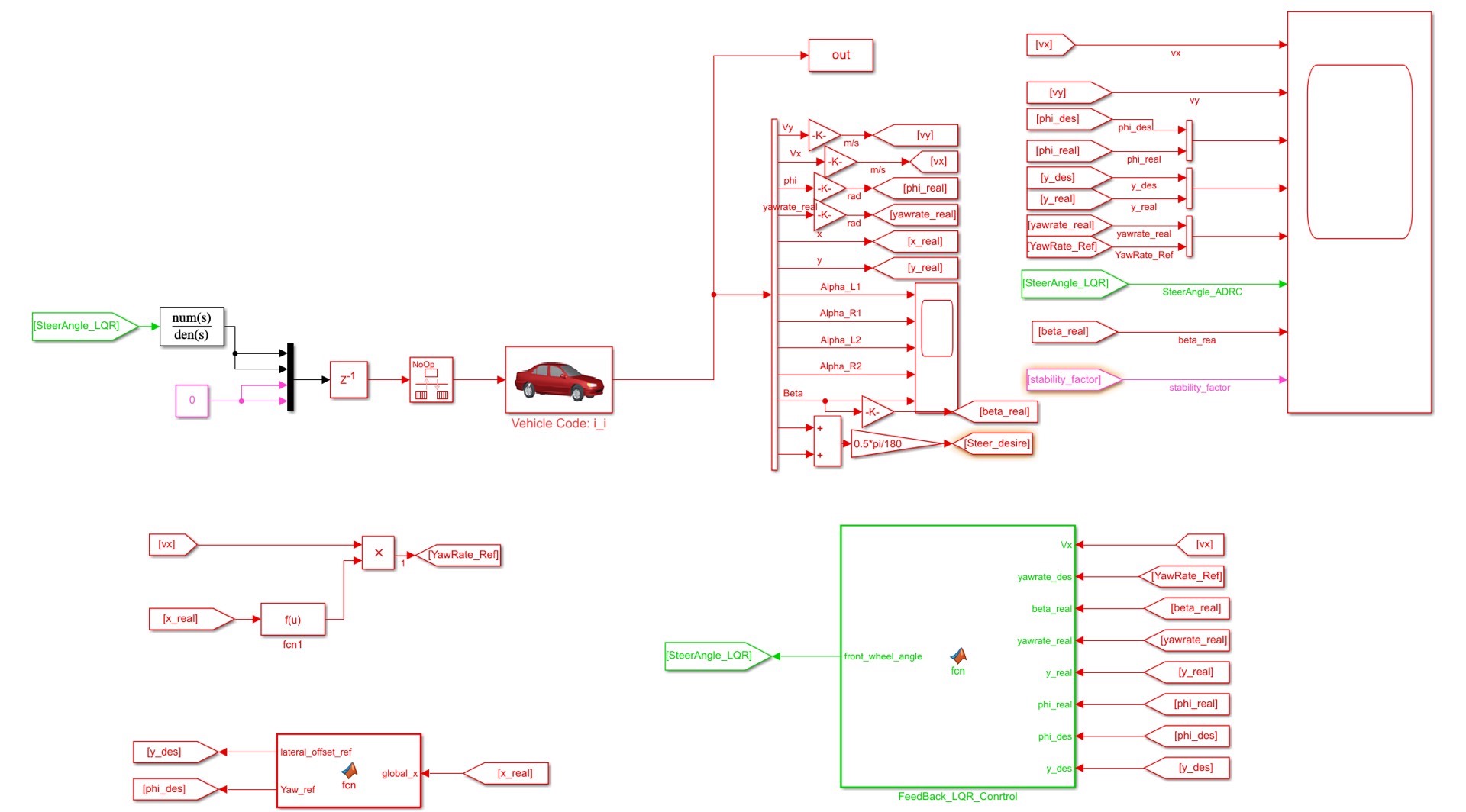
基于LQR最优控制算法实现的轨迹跟踪控制,建立了基于车辆的质心侧偏角、横摆角速度,横向误差,航向误差四自由度动力学模型作为控制模型,通过最优化航向误差和横向误差,实时计算最优的K值,计算期望的前轮转角实现轨迹跟踪,仿真效果良好,有对应的资料
ID:85150692641489959





 浙公网安备 33010602011771号
浙公网安备 33010602011771号