
基于MPC的分布式电动汽车协同自适应巡航控制,采用上下分层控制方式,上层控制器采用模型预测控制mpc方式,
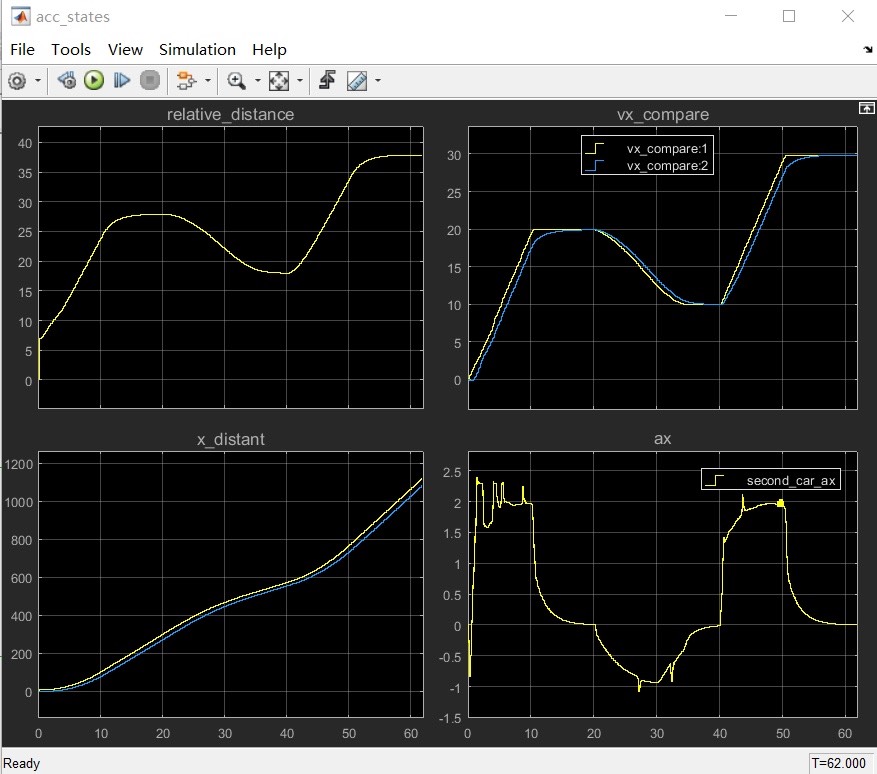
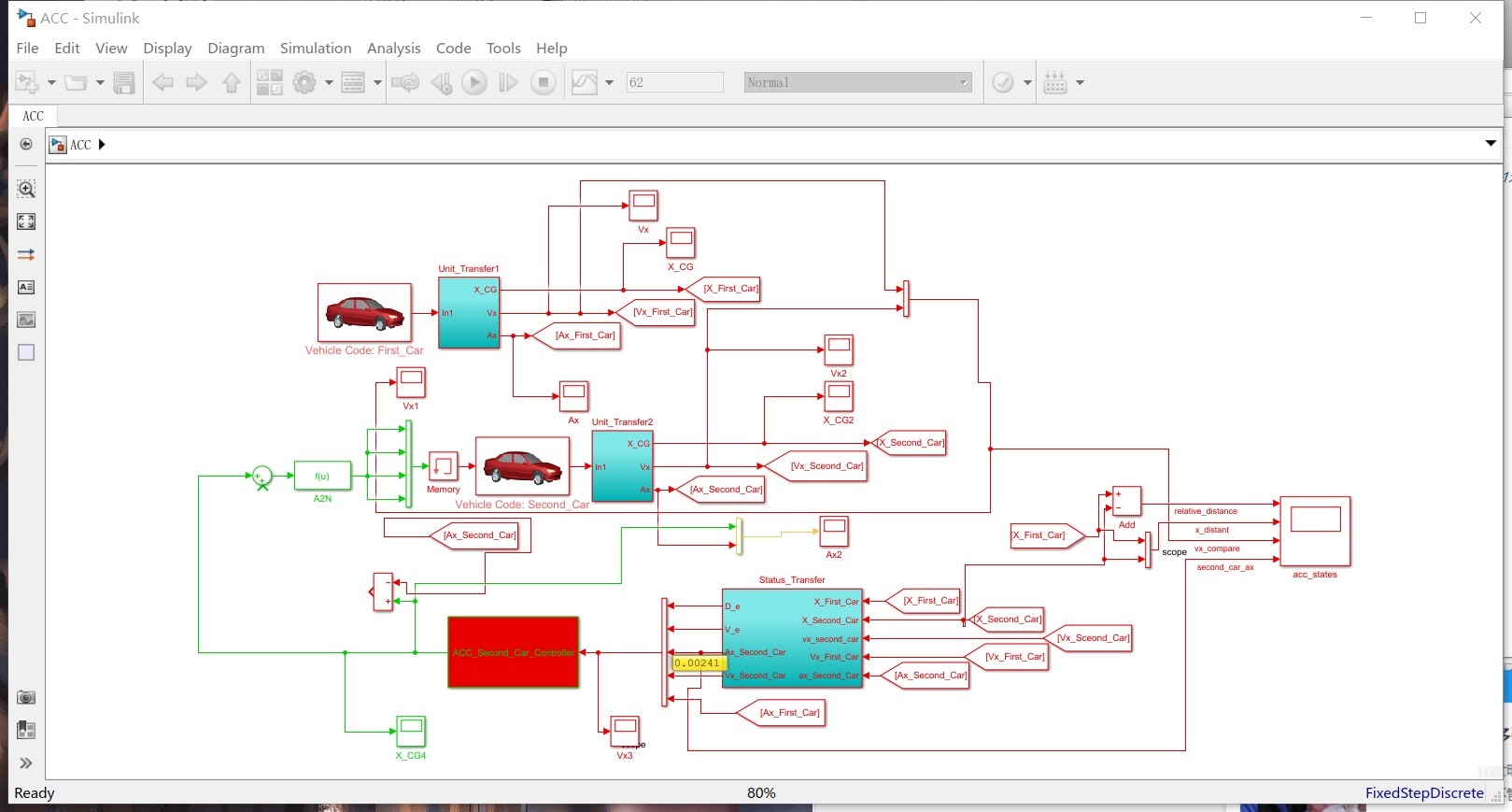
基于MPC的分布式电动汽车协同自适应巡航控制,采用上下分层控制方式,上层控制器采用模型预测控制mpc方式,产生期望的加速度,下层根据期望的加速度分配扭矩;仿真结果良好,能够实现前车在加减速情况下,规划期望的跟车距离,产生期望的加速度进行自适应巡航控制。
ID:15180686075927975

基于MPC的分布式电动汽车协同自适应巡航控制,采用上下分层控制方式,上层控制器采用模型预测控制mpc方式,产生期望的加速度,下层根据期望的加速度分配扭矩;仿真结果良好,能够实现前车在加减速情况下,规划期望的跟车距离,产生期望的加速度进行自适应巡航控制。
ID:15180686075927975

 浙公网安备 33010602011771号
浙公网安备 33010602011771号