基于FPGA的图像退化算法verilog实现,分别实现横向和纵向运动模糊,包括tb和MATLAB辅助验证
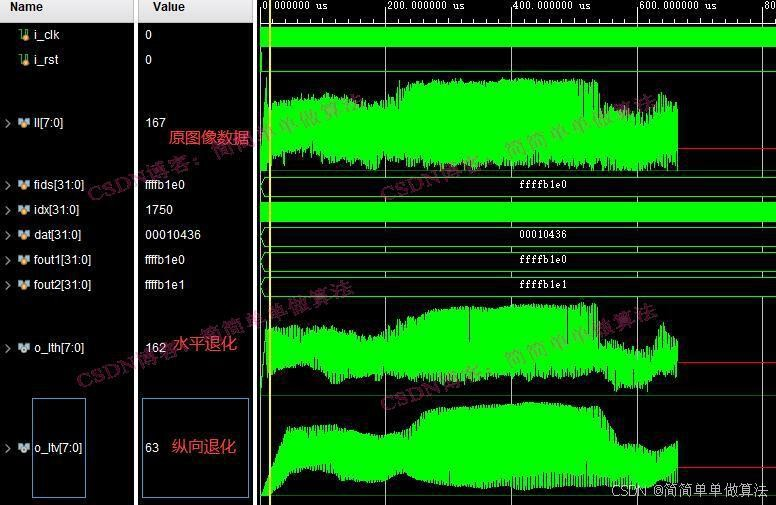
1.算法运行效果图预览
(完整程序运行后无水印)
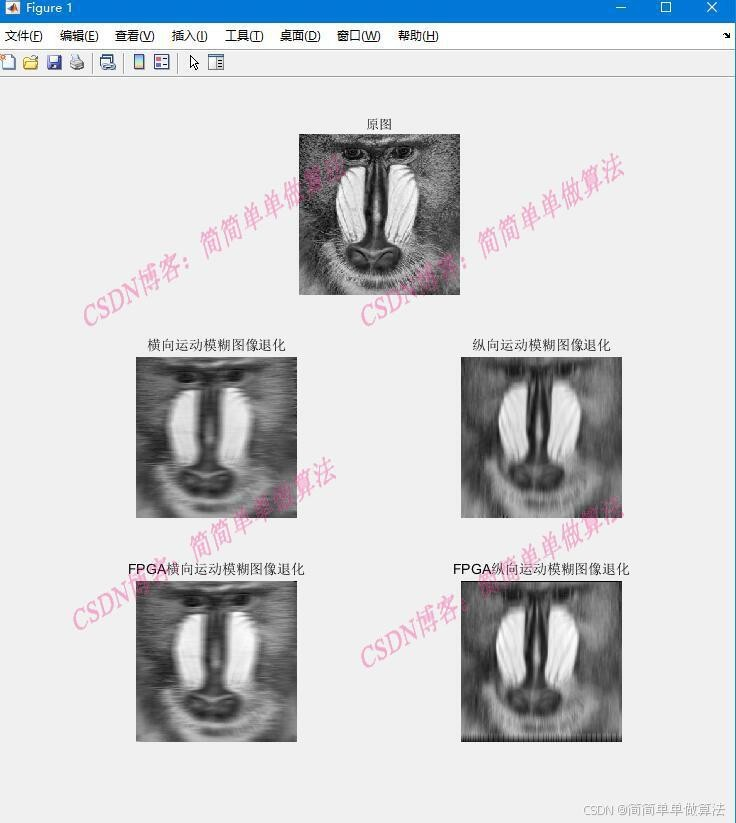
将数据导入MATLAB,显示图像:
2.算法运行软件版本
vivado2019.2,matlab2022a
3.部分核心程序
(完整版代码包含详细中文注释和操作步骤视频)
module test_image;
reg i_clk;
reg i_rst;
reg [7:0] Buffer [0:100000];
reg [7:0] II;
wire [7:0] o_Ith;
wire [7:0] o_Itv;
integer fids,idx=0,dat;
//D:\FPGA_Proj\FPGAtest\code_proj\project_1\project_1.srcs\sources_1
initial
begin
fids = $fopen("D:\\code2\\code_proj\\data.bmp","rb");
dat = $fread(Buffer,fids);
$fclose(fids);
end
initial
begin
i_clk=1;
i_rst=1;
#1000;
i_rst=0;
end
always #5 i_clk=~i_clk;
always@(posedge i_clk)
begin
II<=Buffer[idx];
idx<=idx+1;
end
tops tops_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_I (II),
.o_Ith (o_Ith),
.o_Itv (o_Itv)
);
integer fout1;
integer fout2;
initial begin
fout1 = $fopen("SAVEDATA1.txt","w");
fout2 = $fopen("SAVEDATA2.txt","w");
end
always @ (posedge i_clk)
begin
if(idx<=66614 & idx>=2)
$fwrite(fout1,"%d\n",o_Ith);
else
$fwrite(fout1,"%d\n",0);
if(idx<=66614 & idx>=2)
$fwrite(fout2,"%d\n",o_Itv);
else
$fwrite(fout2,"%d\n",0);
end
endmodule
4.算法理论概述
在图像处理领域,图像退化是一个常见的问题,而运动模糊是其中一种典型的退化形式。运动模糊通常是由于相机与物体之间的相对运动而产生的,会导致图像变得模糊不清。基于 FPGA(现场可编程门阵列)实现图像退化算法具有实时性高、并行处理能力强等优点。
算法流程
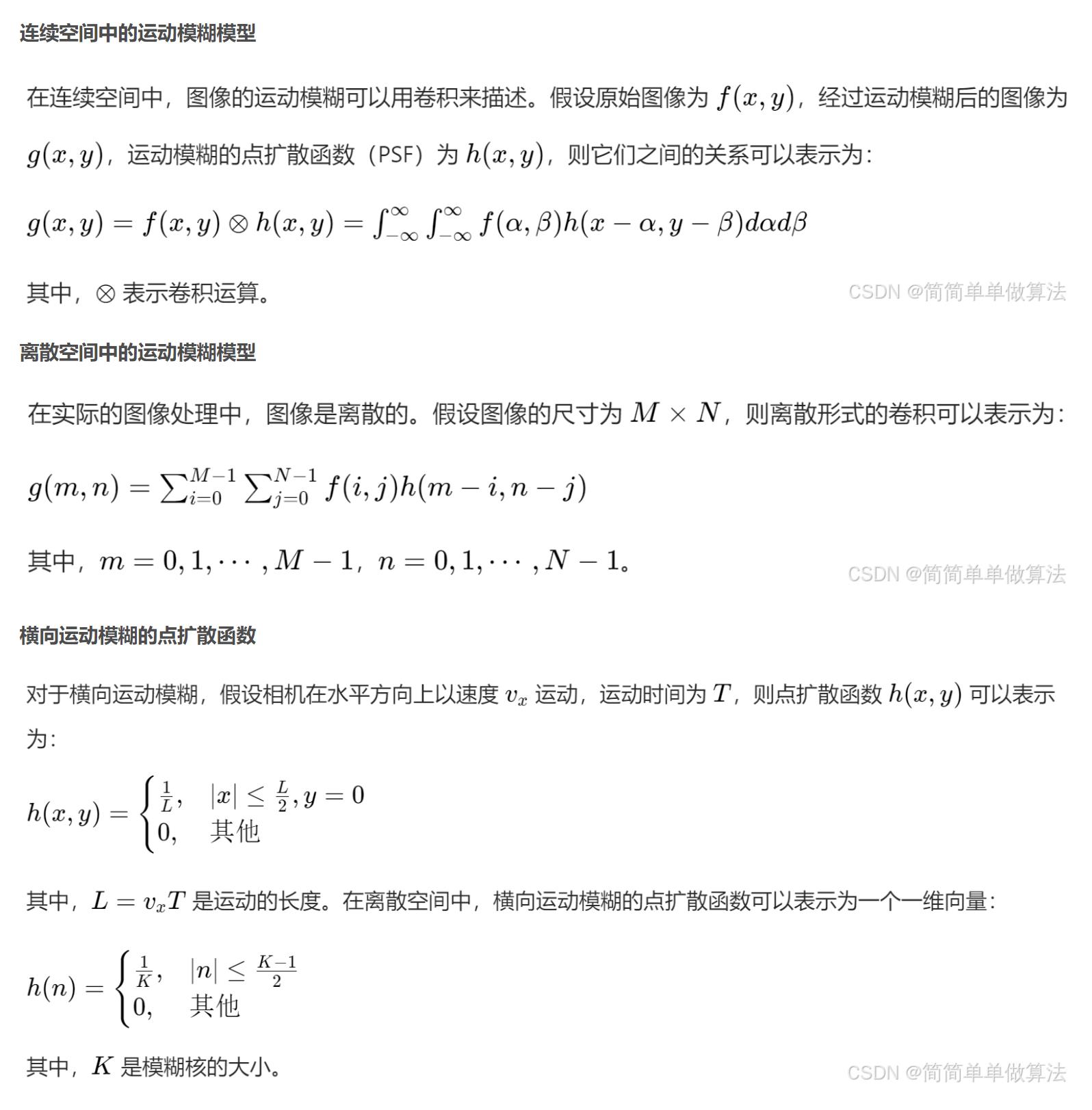
横向运动模糊的实现可以通过对图像的每一行进行一维卷积来完成。具体步骤如下:
1.读取图像数据:从图像存储器中逐行读取图像数据。
2.卷积操作:对每一行图像数据进行一维卷积,卷积核为横向运动模糊的点扩散函数。
3.存储结果:将卷积后的结果存储到另一个图像存储器中。
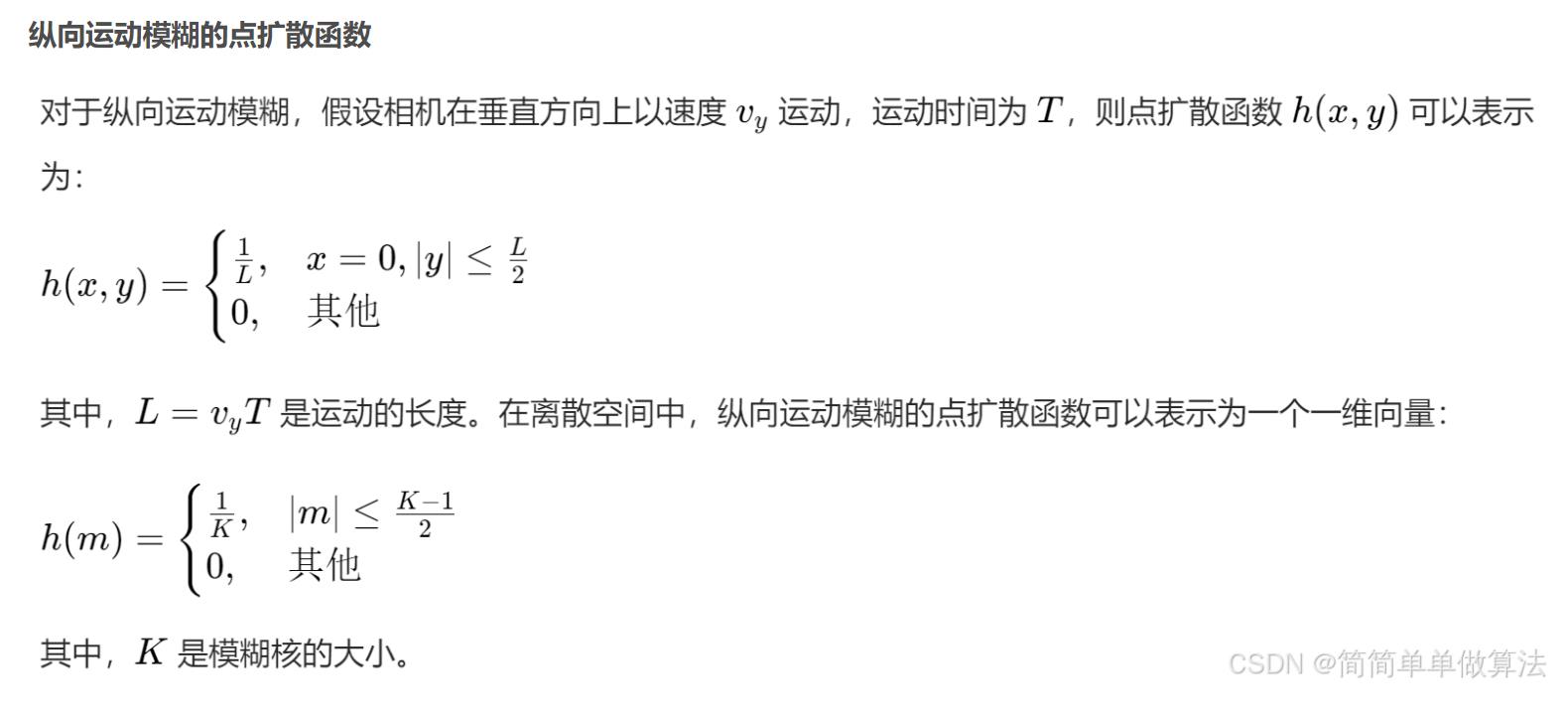
纵向运动模糊的实现可以通过对图像的每一列进行一维卷积来完成。具体步骤如下:
1.读取图像数据:从图像存储器中逐列读取图像数据。
2.卷积操作:对每一列图像数据进行一维卷积,卷积核为纵向运动模糊的点扩散函数。
3.存储结果:将卷积后的结果存储到另一个图像存储器中。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号