3d构建(线性三角形法确定三维坐标)
当已知基本矩阵F和摄像机矩阵给定时,可以使用线性三角形法(Linear triangulation methods),其作用是通过两个或者多个视图中的平面坐标,求解对应的3D坐标。
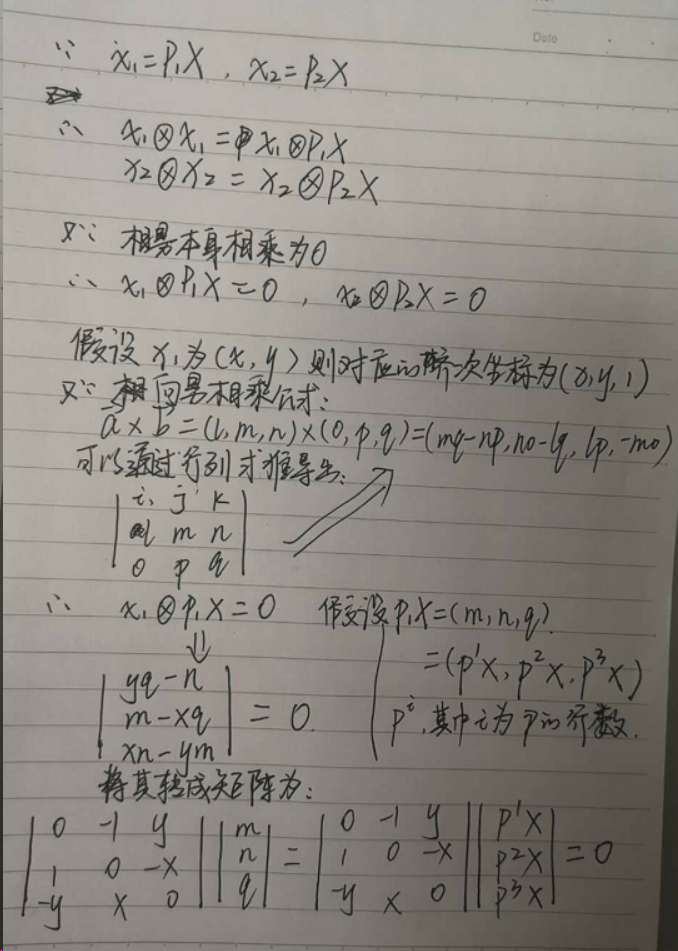
已知条件: 空间坐标X分别在不同摄像机C1与C2的图像坐标系中的坐标x1与x2,分别对应的摄像机矩阵P1和P2.
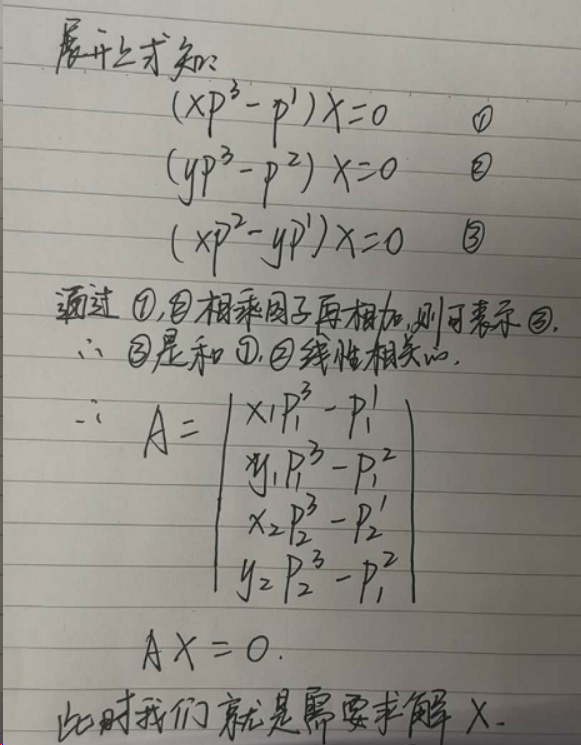
根据相机模型可以得出:x1 = P1X,x2 = P2X,然后推导X.
参考:
https://blog.csdn.net/u011089570/article/details/78791123

 浙公网安备 33010602011771号
浙公网安备 33010602011771号