
0.引言
在C++中,多态是实现抽象和复用的核心机制,对于传统的多态(虚函数),我们已经在C++ 对象模型:虚函数表的底层结构与多态实现 进行了讲解,其并非零成本的抽象,会带来性能的损耗。
为了克服这一限制,现代C++提供了基于模板的编译期解决方案。本文将深入探讨如何通过CRTP(Curiously Recurring Template Pattern,奇异递归模板模式) 实现编译期多态,在保留多态抽象能力的同时消除运行时开销,真正践行 C++“零开销抽象” 的设计哲学。
1.CRTP基本结构和实现原理
CRTP是通过模板继承来实现的静态多态技术(简单来说就是可以让父类知道子类的类型,从而达到编译期做一些事情的目的,本文主要从静态多态角度来看,其他应用后面文章再讨论),其核心思想就是让派生类作为基类的模板,形成“自引用”的继承关系,从而实现编译期的多态行为,其结构和调用方式一般如下:
#include <iostream>
// 基类模板,以派生类作为模板参数
template <typename Child>
class Base
{
public:
// 基类通过static_cast调用派生类的实现
void interface() {
static_cast<Child*>
(this)->
interface();
}
};
// 派生类继承基类,并将自身作为模板参数传入
class Derived
: public Base<Derived>
{
public:
// 实现具体逻辑
void interface() {
// 派生类的实际功能
std::cout<<
"hello world"<<std::endl;
}
};
int main()
{
Base<Derived>
* pBase = new Derived();
pBase->
interface();
return 0;
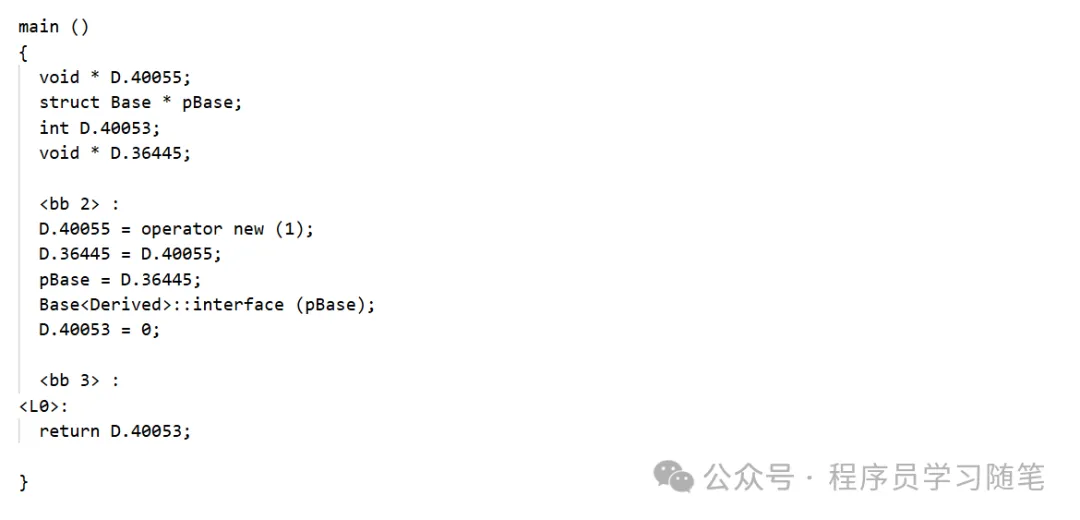
}子类通过继承以自身为模板参数的基类Base,基类就可以通过转换直接访问派生类的方法而无需虚函数。我们可以使用g++ -c -fdump-tree-all a.cpp来查看一下其实例化后的代码a.cpp.018t.fixup_cfg1(只截取关键信息)。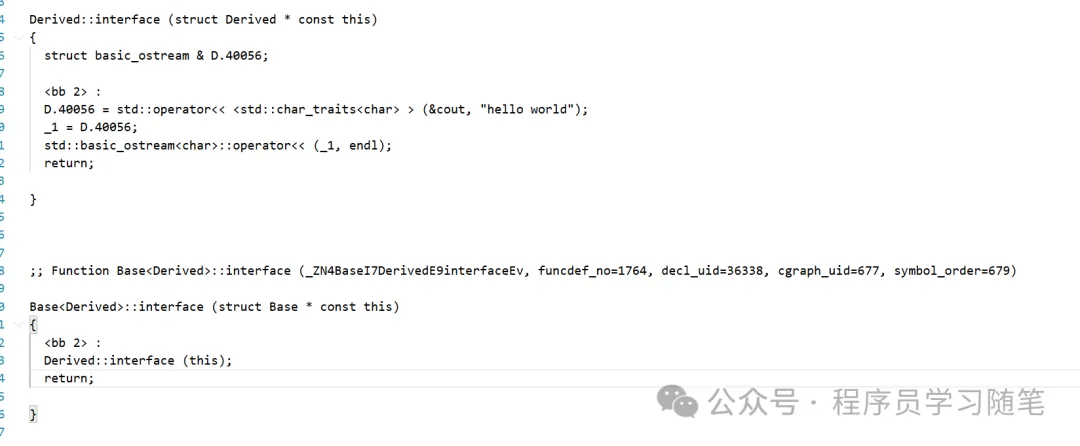
2.性能测试
我们通过一个简单的代码例子来实际看一看虚函数以及CRTP的性能差异(内存就不用看了,包含虚函数的对象会多虚函数指针,主要看执行时间),代码如下:
#include <iostream>
#include <chrono>
// 测试配置
const int ITERATIONS = 1000000000;
// 10亿次迭代
// ------------------------------
// 虚函数版本
// ------------------------------
class VirtualBase
{
public:
virtual int getValue() = 0;
virtual ~VirtualBase() = default;
};
class VirtualImpl
: public VirtualBase {
public:
int getValue() override {
return 42;
// 简单返回固定值
}
};
// ------------------------------
// CRTP版本
// ------------------------------
template <typename Derived>
class CRTPBase
{
public:
int getValue() {
return static_cast<Derived*>
(this)->
getValue();
}
};
class CRTPImpl
: public CRTPBase<CRTPImpl>
{
public:
int getValue() {
return 42;
// 与虚函数版本实现完全相同
}
};
// ------------------------------
// 性能测试
// ------------------------------
int main() {
// 初始化测试对象
VirtualImpl v_obj;
VirtualBase* v_ptr = &v_obj;
// 虚函数多态调用
CRTPImpl c_obj;
CRTPBase<CRTPImpl>
* c_ptr = &c_obj;
// CRTP多态调用
// 测试虚函数
auto start_v = std::chrono::high_resolution_clock::now();
volatile int sum_v = 0;
for (int i = 0; i < ITERATIONS;
++i) {
sum_v += v_ptr->
getValue();
}
auto end_v = std::chrono::high_resolution_clock::now();
double time_v = std::chrono::duration<double>
(end_v - start_v).count();
// 测试CRTP
auto start_c = std::chrono::high_resolution_clock::now();
volatile int sum_c = 0;
for (int i = 0; i < ITERATIONS;
++i) {
sum_c += c_ptr->
getValue();
}
auto end_c = std::chrono::high_resolution_clock::now();
double time_c = std::chrono::duration<double>
(end_c - start_c).count();
// 输出结果
std::cout <<
"虚函数耗时: " << time_v <<
" 秒\n";
std::cout <<
"CRTP耗时: " << time_c <<
" 秒\n";
std::cout <<
"CRTP比虚函数快: " <<
(1 - time_c / time_v) * 100 <<
"%\n";
return 0;
}我们分析一下两者的开销,虚函数的话我们比较了解了,主要是虚函数指针的查找和调用,当然这个会缓存下来,而CRTP需要多一次普通调用和static_cast,当前测试场景比较简单,所以虚函数地址缓存不会失效,在O0优化下虚函数会更快。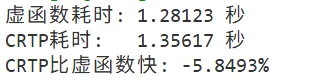
如果我们开启O3优化,CRTP会优化为内联,这样的话CRTP会比虚函数快(虚函数可能存在去虚拟化,所以不明显),如果是实际场景中,虚函数调用不会这么单一且类型也不能确定,不能去虚拟化以及虚函数缓存可能失效,这种场景下,CRTP会明显快于虚函数。
如上所说,上面的测试有可能有虚函数去虚拟化的问题,我们可以使用-fno-devirtualize禁止去虚拟化,这样最能体现二者的差异。
所以,在实际场景中,我们使用CRTP正常情况下性能会大大高于虚函数。
3.CRTP实际适用场景
1)静态多态:在不需要运行时多态的场景中使用以消除虚函数的开销。
2)代码复用:通过模板继承来给派生类增加通用功能,这个在标准库中有很多应用,我们后面文章专门讨论。
3)接口约束和静态断言:可以在基类使用static_assert结合 SFINAE 技术进行编译期检查,这个需要比较高的C++支持:
#include <type_traits>
template <typename Derived>
class ShapeCRTP
{
public:
double area() const {
// 检查Derived是否有calculate_area方法
static_assert(std::is_same_v<
decltype(std::declval<Derived>
().calculate_area()),
double
>
, "Derived must implement calculate_area() returning double");
return static_cast<
const Derived*>
(this)->
calculate_area();
}
};4.局限性
1)不适合动态类型场景:需运行时动态创建 / 销毁不同类型对象时,动态多态更合适;
2)代码调试难度增加:模板展开可能导致复杂的错误信息,需熟悉编译器诊断工具;
3)可读性问题:对新手而言,CRTP 的自引用结构较难理解。
5.总结
本文介绍了CRTP 如何将多态绑定从运行时迁移到编译期,讲解了 C++“零开销抽象” 的核心思想 ——你不需要为未使用的特性支付成本。在性能至关重要的场景中,用 CRTP 实现的编译期多态既能保留抽象设计的灵活性,又能消除动态多态的性能损耗。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号