RL 策略优化 (4.2章节)
网格世界策略评估与策略改进(5 动作)
注:
- 本文参照 《强化学习中的数学原理》一书,4.2章节“策略优化”部分的。
- 代码借助AI一步步写出,在复现算法过程中,中间结果与书中不一样。
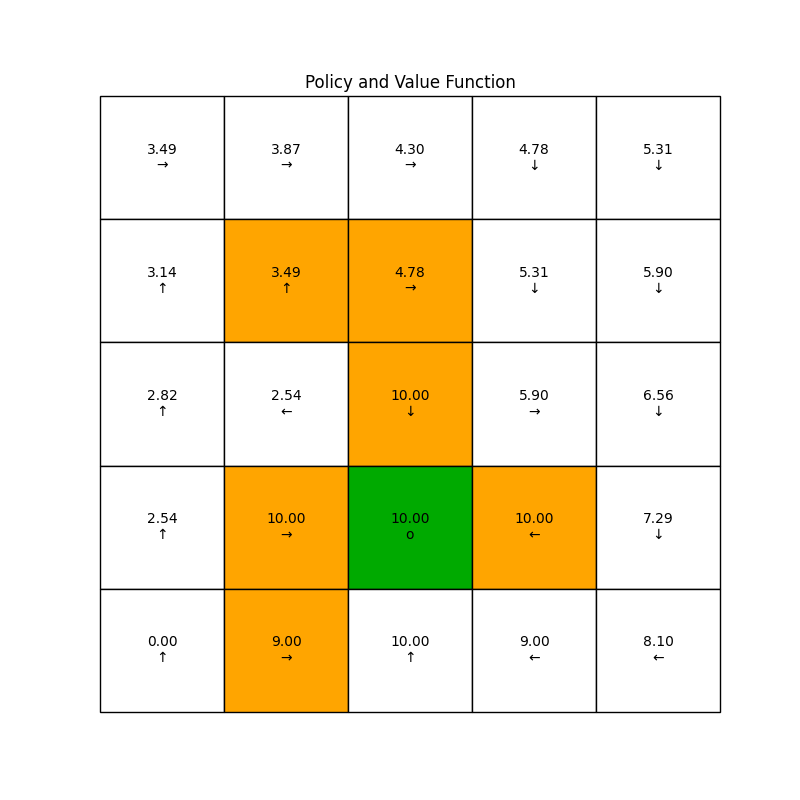
- 代码大循环迭代17次
https://github.com/MathFoundationRL/Book-Mathematical-Foundation-of-Reinforcement-Learning/tree/main
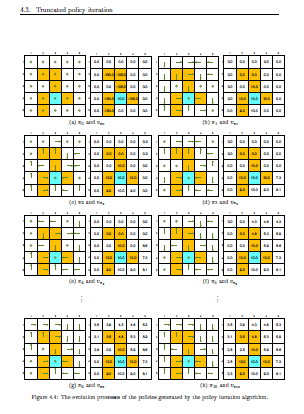
本文以一个 5×5 网格世界为例,完整展示“策略评估(Policy Evaluation)→ 策略改进(Policy Improvement)”的动态规划流程,包含公式、代码、执行步骤与可视化结果(图文并茂)。
场景设定
- 网格大小:5×5,坐标以 1-based 书写,例如左上角为 (1,1)。
- 奖励规则:
- 出格(尝试走出边界):保持原地不动,行为与“原地不动”同值(在本例的改进里我们做了并列时偏好不动的处理)。
- 进入禁区:奖励 −10。
- 进入目标:奖励 +1。
- 其余格子:奖励 0。
- 禁区坐标(橙色):(2,2), (2,3), (3,3), (4,2), (4,4), (5,2)
- 目标坐标(绿色):(4,3)
- 动作集合(5 个):上、下、左、右、原地不动。
为了更直观,我们提供网格渲染函数,将禁区标橙色、目标标绿色,并在每个格子里同时显示该格子的价值与当前策略的动作符号(↑ ↓ ← → o)。
核心公式
-
策略评估(给定策略 π,确定动作):
\[V_{k+1}(s) = R(s, a) + \gamma\, V_k(s') \]其中,
a = π(s),s'是执行a后的下一状态;若越界则保持原地,且“原地不动”与越界同值。 -
策略改进(贪心改进):
\[\pi_{new}(s) = \arg\max_a \Big[ R(s, a) + \gamma\, V(s') \Big] \]当不同动作价值相同(并列)时,本例的实现会偏好“原地不动”,确保边界不出现“继续向外”的箭头。
代码结构(关键片段)
完整代码见本文末尾。以下为关键函数与初始化简述。
初始化与奖励矩阵
n = 5
V0 = np.zeros((n, n))
# 初始策略:全部不动(动作索引 4)
policy0 = np.full((n, n), 4, dtype=int)
# 构建奖励矩阵 r:禁区 -10,目标 +1,其它 0
r = np.zeros((n, n))
forbidden_positions = [(2, 2), (2, 3), (3, 3), (4, 2), (4, 4), (5, 2)]
goal_position = (4, 3)
for (ri, ci) in forbidden_positions:
r[ri - 1, ci - 1] = -10
r[goal_position[0] - 1, goal_position[1] - 1] = 1
gamma = 0.9
theta = 1e-5
策略评估(给定策略)
def policy_evaluation_fixed_policy(V, policy, r, gamma=0.9, theta=1e-5, max_iter=1000):
n = V.shape[0]
V_new = V.copy()
actions = [(-1, 0), (1, 0), (0, -1), (0, 1), (0, 0)] # 上、下、左、右、不动
for it in range(max_iter):
delta = 0
for i in range(n):
for j in range(n):
a_idx = policy[i, j]
di, dj = actions[a_idx]
ni, nj = i + di, j + dj
# 越界则保持原地(与不动同值)
if ni < 0 or ni >= n or nj < 0 or nj >= n:
ni, nj = i, j
v_temp = r[ni, nj] + gamma * V_new[ni, nj]
delta = max(delta, abs(v_temp - V_new[i, j]))
V_new[i, j] = v_temp
if delta < theta:
break
return V_new
策略改进(贪心,并列偏好“原地不动”)
def policy_improvement_fixed_values(V, r, gamma=0.9):
n = V.shape[0]
new_policy = np.zeros((n, n), dtype=int)
actions = [(-1, 0), (1, 0), (0, -1), (0, 1), (0, 0)]
for i in range(n):
for j in range(n):
action_values = []
for a_idx, (di, dj) in enumerate(actions):
ni, nj = i + di, j + dj
# 越界则保持原地(与不动同值)
if ni < 0 or ni >= n or nj < 0 or nj >= n:
ni, nj = i, j
action_value = r[ni, nj] + gamma * V[ni, nj]
action_values.append(action_value)
# tie-breaking:偏好“不动”(索引 4)以避免边界显示外向箭头
max_val = max(action_values)
best_idxs = [idx for idx, val in enumerate(action_values) if val == max_val]
best_action = 4 if 4 in best_idxs else best_idxs[0]
new_policy[i, j] = best_action
return new_policy
渲染函数(图像)
def render_policy_value(V, policy, forbidden=None, goal=None, filename='policy_value_grid.png'):
import matplotlib.pyplot as plt
from matplotlib.table import Table
n = V.shape[0]
fig, ax = plt.subplots(figsize=(8, 8))
ax.set_axis_off()
tb = Table(ax, bbox=[0, 0, 1, 1])
actions_symbols = ['\u2191', '\u2193', '\u2190', '\u2192', 'o']
forb0 = set()
if forbidden is not None:
forb0 = {(r - 1, c - 1) for (r, c) in forbidden}
goal0 = None
if goal is not None:
goal0 = (goal[0] - 1, goal[1] - 1)
for i in range(n):
for j in range(n):
cell_text = f"{V[i, j]:.2f}\n{actions_symbols[policy[i, j]]}"
face = 'white'
if (i, j) in forb0:
face = '#FFA500' # 橙色:禁区
elif goal0 is not None and (i, j) == goal0:
face = '#00AA00' # 绿色:目标
tb.add_cell(i, j, 1/n, 1/n, text=cell_text, loc='center', facecolor=face)
ax.add_table(tb)
plt.title('Policy and Value Function')
plt.savefig(filename)
plt.close()
执行流程与结果
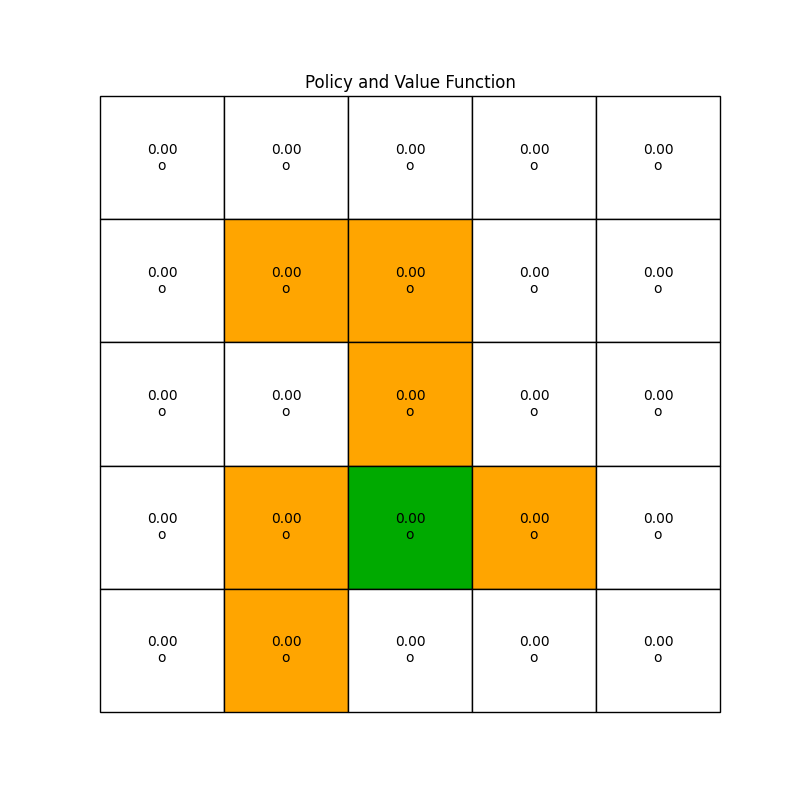
- 渲染初始策略与价值(全部不动):
- 生成图像:
render_policy_value(V0, policy0,
forbidden=forbidden_positions,
goal=goal_position,
filename='initial_policy_value.png')
- 图像:
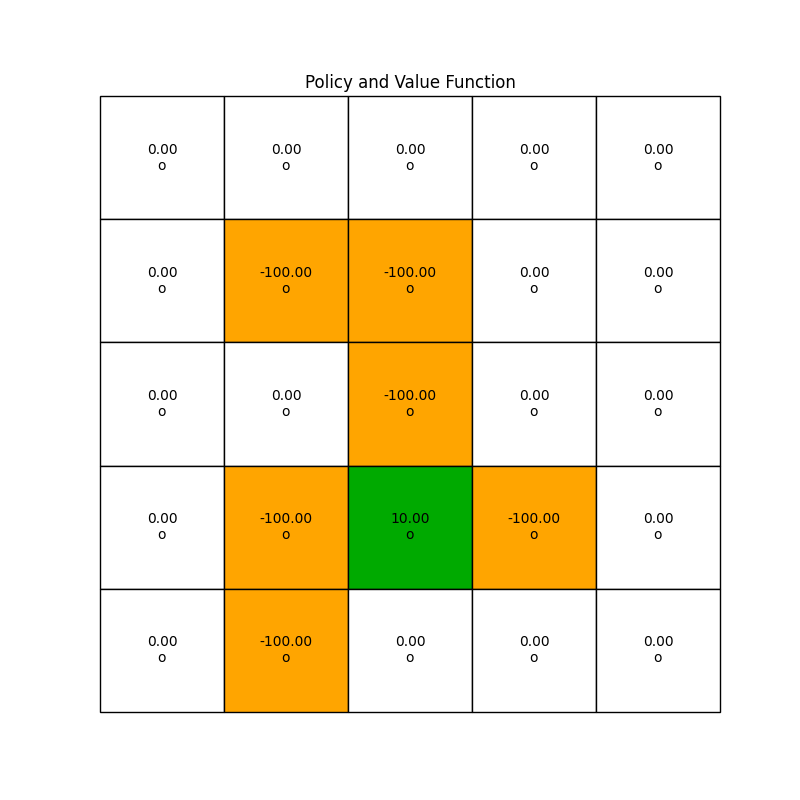
- 第一次策略评估(给定策略 policy0,更新价值):
V1 = policy_evaluation_fixed_policy(V0, policy0, r, gamma, theta)
render_policy_value(V1, policy0,
forbidden=forbidden_positions,
goal=goal_position,
filename='policy_value_after_evaluation.png')
- 图像:
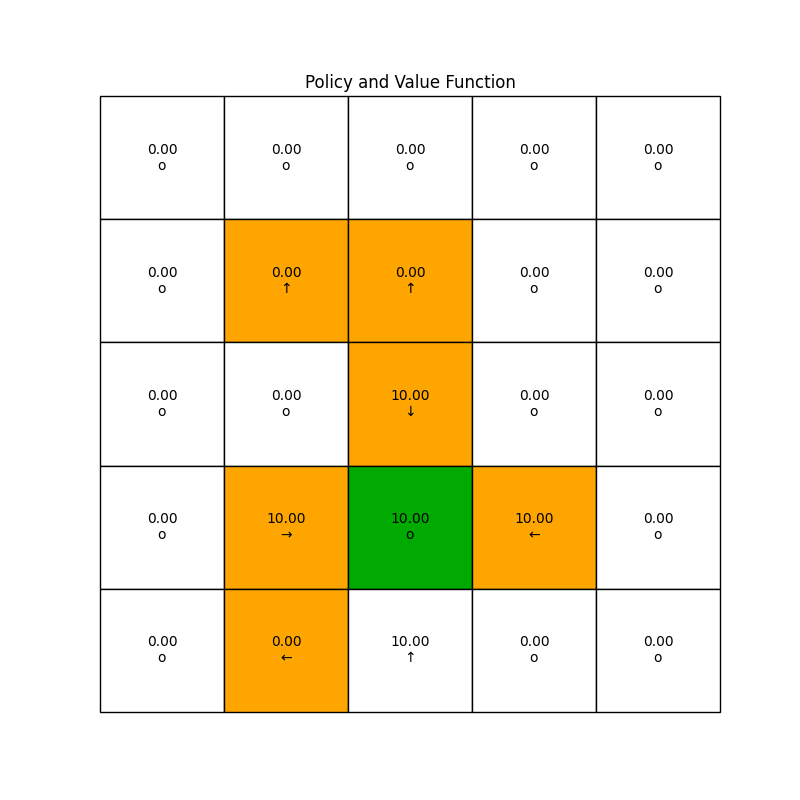
- 第一次策略改进(在 V1 上贪心选动作,边界并列偏好不动):
policy1 = policy_improvement_fixed_values(V1, r, gamma)
render_policy_value(V1, policy1,
forbidden=forbidden_positions,
goal=goal_position,
filename='policy_after_improvement.png')
- 图像:
- 一次性整体迭代:
# 迭代下去,直到策略不再改变,显示最终的最优策略和价值矩阵
policy_curr = policy0
V_curr = V0
iter_n = 1
while True:
iter_n += 1
V_next = policy_evaluation_fixed_policy(V_curr, policy_curr, r, gamma, theta)
policy_next = policy_improvement_fixed_values(V_next, r, gamma)
if np.array_equal(policy_next, policy_curr):
break
V_curr, policy_curr = V_next, policy_next
render_policy_value(V_curr, policy_curr, forbidden=forbidden_positions, goal=goal_position, filename='final_policy_value.png')
print(f"策略迭代共进行了 {iter_n} 次,得到最终最优策略和价值矩阵,见 'final_policy_value.png'。")
import numpy as np
# n * n 网格世界中的策略评估示例, n = 5,第一个格子表示为(1,1)最左上方。
# 设定奖励规则:
## 出格奖励-1,进入禁区奖励-10,进入目标奖励+1,其余格子奖励0
## 禁区橙色位置为(2,2),(2,3),(3,3),(4,2),(4,4),(5,2)
## 目标位置(4,3)
# 初始化参数
n = 5 # 网格大小 n*n
V0 = np.zeros((n, n)) # 初始价值矩阵 V0,全为 0
# 初始化策略为全部不移动
# 动作定义:上、下、左、右、不动
# actions = [(-1, 0), (1, 0), (0, -1), (0, 1), (0, 0)]
# 初始策略设为“不动”,对应动作索引 4
policy0 = np.full((n, n), 4, dtype=int)
# 根据设定生成奖励矩阵 r
r = np.zeros((n, n))
forbidden_positions = [(2, 2), (2, 3), (3, 3), (4, 2), (4, 4), (5, 2)]
goal_position = (4, 3)
# 将坐标从 1-based 转换为 0-based 并赋值
for (ri, ci) in forbidden_positions:
r[ri - 1, ci - 1] = -10
r[goal_position[0] - 1, goal_position[1] - 1] = 1
# 说明:出格奖励 -1 属于转移导致的外部奖励,不直接体现在静态 r 矩阵中,
# 若需要在转移模型中体现,应在动态更新时处理。
gamma = 0.9
theta = 1e-5 # 收敛阈值:两次迭代间最大变化小于等于 theta 时停止
# 根据当前价值,固定价值矩阵,找出最优策略,得到新的策略(移动方案)和r_mat
## 只做一次策略改进
def policy_improvement_fixed_values(V, r, gamma=0.9):
n = V.shape[0]
new_policy = np.zeros((n, n), dtype=int)
actions = [(-1, 0), (1, 0), (0, -1), (0, 1), (0, 0)] # 上、下、左、右、不动
for i in range(n):
for j in range(n):
action_values = []
for a_idx, (di, dj) in enumerate(actions):
ni, nj = i + di, j + dj
# 检查是否出格
if ni < 0 or ni >= n or nj < 0 or nj >= n:
ni, nj = i, j # 出格则不动
action_value = r[ni, nj] + gamma * V[ni, nj]
action_values.append(action_value)
# 平局时优先选择“不动”(索引 4),使边界显示为 'o'
max_val = max(action_values)
best_idxs = [idx for idx, val in enumerate(action_values) if val == max_val]
best_action = 4 if 4 in best_idxs else best_idxs[0]
new_policy[i, j] = best_action
return new_policy
# 在确定的移动策略和初始的价值矩阵,计算出新的价值矩阵
def policy_evaluation_fixed_policy(V, policy, r, gamma=0.9, theta=1e-5, max_iter=1000):
n = V.shape[0]
V_new = V.copy()
actions = [(-1, 0), (1, 0), (0, -1), (0, 1), (0, 0)] # 上、下、左、右、不动
for it in range(max_iter):
delta = 0
for i in range(n):
for j in range(n):
a_idx = policy[i, j]
di, dj = actions[a_idx]
ni, nj = i + di, j + dj
# 检查是否出格
if ni < 0 or ni >= n or nj < 0 or nj >= n:
ni, nj = i, j # 出格则不动
v_temp = r[ni, nj] + gamma * V_new[ni, nj]
delta = max(delta, abs(v_temp - V_new[i, j]))
V_new[i, j] = v_temp
if delta < theta:
break
return V_new
# 一个画图的函数,可视化网格,当前的之前的策略和价值矩阵,找到的最优的策略和计算得到的价值估计
def render_policy_value(V, policy, forbidden=None, goal=None, filename='policy_value_grid.png'):
import matplotlib.pyplot as plt
from matplotlib.table import Table
n = V.shape[0]
fig, ax = plt.subplots(figsize=(8, 8))
ax.set_axis_off()
tb = Table(ax, bbox=[0, 0, 1, 1])
actions_symbols = ['↑', '↓', '←', '→', 'o'] # 上、下、左、右、不动
# 处理禁区与目标坐标(输入为 1-based,转换为 0-based)
forb0 = set()
if forbidden is not None:
forb0 = {(r - 1, c - 1) for (r, c) in forbidden}
goal0 = None
if goal is not None:
goal0 = (goal[0] - 1, goal[1] - 1)
for i in range(n):
for j in range(n):
cell_text = f"{V[i, j]:.2f}\n{actions_symbols[policy[i, j]]}"
face = 'white'
if (i, j) in forb0:
face = '#FFA500' # 橙色:禁区
elif goal0 is not None and (i, j) == goal0:
face = '#00AA00' # 绿色:目标
tb.add_cell(i, j, 1/n, 1/n, text=cell_text, loc='center', facecolor=face)
ax.add_table(tb)
plt.title('Policy and Value Function')
plt.savefig(filename)
plt.close()
# 渲染初始策略和价值矩阵(禁区橙色,目标绿色)
render_policy_value(V0, policy0, forbidden=forbidden_positions, goal=goal_position, filename='initial_policy_and_initial_value.png')
# 执行一次策略评估
V1 = policy_evaluation_fixed_policy(V0, policy0, r, gamma, theta)
render_policy_value(V1, policy0, forbidden=forbidden_positions, goal=goal_position, filename='initial_policy_evaluation.png')
# 执行一次策略改进
policy1 = policy_improvement_fixed_values(V1, r, gamma)
render_policy_value(V1, policy1, forbidden=forbidden_positions, goal=goal_position, filename='policy_after_first_improvement.png')
# 执行一次策略评估
V2 = policy_evaluation_fixed_policy(V1, policy1, r, gamma, theta)
# 渲染改进后策略对应的价值矩阵
render_policy_value(V2, policy1, forbidden=forbidden_positions, goal=goal_position, filename='1st_improved_policy_evaluation.png')
# 迭代下去,直到策略不再改变,显示最终的最优策略和价值矩阵
policy_curr = policy0
V_curr = V0
iter_n = 1
while True:
iter_n += 1
V_next = policy_evaluation_fixed_policy(V_curr, policy_curr, r, gamma, theta)
policy_next = policy_improvement_fixed_values(V_next, r, gamma)
if np.array_equal(policy_next, policy_curr):
break
V_curr, policy_curr = V_next, policy_next
render_policy_value(V_curr, policy_curr, forbidden=forbidden_positions, goal=goal_position, filename='final_policy_value.png')
print(f"策略迭代共进行了 {iter_n} 次,得到最终最优策略和价值矩阵,见 'final_policy_value.png'。")

 浙公网安备 33010602011771号
浙公网安备 33010602011771号