10.深入k8s:调度的优先级及抢占机制源码分析
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com
源码版本是1.19

上一篇我们将了获取node成功的情况,如果是一个优先pod获取node失败,那么就会进入到抢占环节中,那么抢占环节k8s会做什么呢,抢占是如何发生的,哪些资源会被抢占这些都是我们这篇要研究的内容。
调度的优先级与抢占机制
正常情况下,当一个 Pod 调度失败后,它就会被暂时“搁置”起来,直到 Pod 被更新,或者集群状态发生变化,调度器才会对这个 Pod 进行重新调度。但是我们可以通过PriorityClass优先级来避免这种情况。通过设置优先级一些优先级比较高的pod,如果pod 调度失败,那么并不会被”搁置”,而是会”挤走”某个 node 上的一些低优先级的 pod,这样就可以保证高优先级的 pod 调度成功。
要使用PriorityClass,首先我们要定义一个PriorityClass对象,例如:
apiVersion: v1
kind: PriorityClass
metadata:
name: high-priority
value: 1000000
globalDefault: false
description: "This priority class should be used for XYZ service pods only."
value越高则优先级越高;globalDefault 被设置为 true 的话,那就意味着这个 PriorityClass 的值会成为系统的默认值,如果是false则表示我们只希望声明使用该 PriorityClass 的 Pod 拥有值为 1000000 的优先级,而对于没有声明 PriorityClass 的 Pod 来说,它们的优先级就是 0。
Pod 就可以声明使用它了:
apiVersion: v1
kind: Pod
metadata:
name: nginx
labels:
env: test
spec:
containers:
- name: nginx
image: nginx
imagePullPolicy: IfNotPresent
priorityClassName: high-priority
高优先级的 Pod 调度失败的时候,调度器的抢占能力就会被触发。调度器就会试图从当前集群里寻找一个节点,使得当这个节点上的一个或者多个低优先级 Pod 被删除后,待调度的高优先级 Pod 就可以被调度到这个节点上。
高优先级Pod进行抢占的时候会将pod的 nominatedNodeName 字段,设置为被抢占的 Node 的名字。然后,在下一周期中决定是不是要运行在被抢占的节点上,当这个Pod在等待的时候,如果有其他更高优先级的 Pod 也要抢占同一个节点,那么调度器就会清空原抢占者的 spec.nominatedNodeName 字段,从而允许更高优先级的抢占者执行抢占。
源码解析
这里我依旧拿出这张图来进行讲解,上一篇我们将了获取node成功的情况,如果是一个优先pod获取node失败,那么就会进入到抢占环节中。
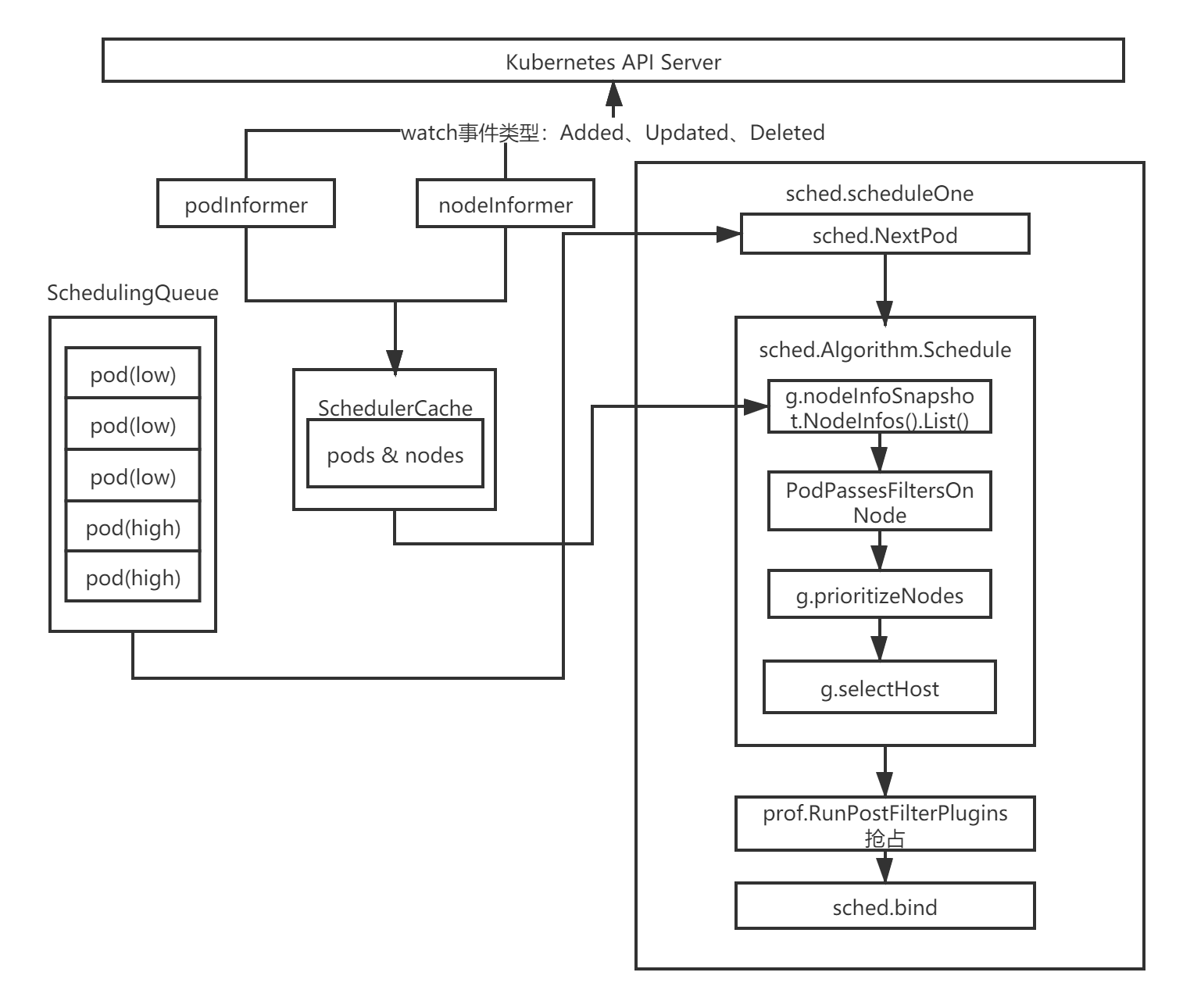
通过上一篇的分析,我们知道,在scheduleOne方法中执行sched.Algorithm.Schedule会选择一个合适的node节点,如果获取node失败,那么就会进入到一个if逻辑中执行抢占。
代码路径:pkg/scheduler/scheduler.go
func (sched *Scheduler) scheduleOne(ctx context.Context) {
...
//为pod资源对象选择一个合适的节点
scheduleResult, err := sched.Algorithm.Schedule(schedulingCycleCtx, prof, state, pod)
//获取node失败,抢占逻辑
if err != nil {
//上面调用失败之后,下面会根据pod执行抢占
nominatedNode := ""
if fitError, ok := err.(*core.FitError); ok {
if !prof.HasPostFilterPlugins() {
klog.V(3).Infof("No PostFilter plugins are registered, so no preemption will be performed.")
} else {
result, status := prof.RunPostFilterPlugins(ctx, state, pod, fitError.FilteredNodesStatuses)
if status.Code() == framework.Error {
klog.Errorf("Status after running PostFilter plugins for pod %v/%v: %v", pod.Namespace, pod.Name, status)
} else {
klog.V(5).Infof("Status after running PostFilter plugins for pod %v/%v: %v", pod.Namespace, pod.Name, status)
}
//抢占成功后,将nominatedNodeName设置为被抢占的 Node 的名字,然后重新进入下一个调度周期
if status.IsSuccess() && result != nil {
nominatedNode = result.NominatedNodeName
}
}
metrics.PodUnschedulable(prof.Name, metrics.SinceInSeconds(start))
} else if err == core.ErrNoNodesAvailable {
metrics.PodUnschedulable(prof.Name, metrics.SinceInSeconds(start))
} else {
klog.ErrorS(err, "Error selecting node for pod", "pod", klog.KObj(pod))
metrics.PodScheduleError(prof.Name, metrics.SinceInSeconds(start))
}
sched.recordSchedulingFailure(prof, podInfo, err, v1.PodReasonUnschedulable, nominatedNode)
return
}
...
}
在这个方法里面RunPostFilterPlugins会执行具体的抢占逻辑,然后返回被抢占的node节点。抢占者并不会立刻被调度到被抢占的 node 上,调度器只会将抢占者的 status.nominatedNodeName 字段设置为被抢占的 node 的名字。然后,抢占者会重新进入下一个调度周期,在新的调度周期里来决定是不是要运行在被抢占的节点上,当然,即使在下一个调度周期,调度器也不会保证抢占者一定会运行在被抢占的节点上。
这样设计的一个重要原因是调度器只会通过标准的 DELETE API 来删除被抢占的 pod,所以,这些 pod 必然是有一定的“优雅退出”时间(默认是 30s)的。而在这段时间里,其他的节点也是有可能变成可调度的,或者直接有新的节点被添加到这个集群中来。
而在抢占者等待被调度的过程中,如果有其他更高优先级的 pod 也要抢占同一个节点,那么调度器就会清空原抢占者的 status.nominatedNodeName 字段,从而允许更高优先级的抢占者执行抢占,并且,这也使得原抢占者本身也有机会去重新抢占其他节点。
接着我们继续看,RunPostFilterPlugins会遍历所有的postFilterPlugins,然后执行runPostFilterPlugin方法:
func (f *frameworkImpl) RunPostFilterPlugins(ctx context.Context, state *framework.CycleState, pod *v1.Pod, filteredNodeStatusMap framework.NodeToStatusMap) (_ *framework.PostFilterResult, status *framework.Status) {
startTime := time.Now()
defer func() {
metrics.FrameworkExtensionPointDuration.WithLabelValues(postFilter, status.Code().String(), f.profileName).Observe(metrics.SinceInSeconds(startTime))
}()
statuses := make(framework.PluginToStatus)
//postFilterPlugins里面只有一个defaultpreemption
for _, pl := range f.postFilterPlugins {
r, s := f.runPostFilterPlugin(ctx, pl, state, pod, filteredNodeStatusMap)
if s.IsSuccess() {
return r, s
} else if !s.IsUnschedulable() {
// Any status other than Success or Unschedulable is Error.
return nil, framework.NewStatus(framework.Error, s.Message())
}
statuses[pl.Name()] = s
}
return nil, statuses.Merge()
}
根据我们上一节看的scheduler的初始化可以知道设置的PostFilter如下:
代码路径:pkg/scheduler/algorithmprovider/registry.go
PostFilter: &schedulerapi.PluginSet{
Enabled: []schedulerapi.Plugin{
{Name: defaultpreemption.Name},
},
},
可见,目前只有一个defaultpreemption来执行抢占逻辑,在postFilterPlugins循环里面会调用到runPostFilterPlugin然后运行defaultpreemption的PostFilter方法,最后执行到preempt执行具体抢占逻辑。
代码路径:pkg/scheduler/framework/plugins/defaultpreemption/default_preemption.go
func (pl *DefaultPreemption) PostFilter(...) (*framework.PostFilterResult, *framework.Status) {
...
//执行抢占
nnn, err := pl.preempt(ctx, state, pod, m)
...
return &framework.PostFilterResult{NominatedNodeName: nnn}, framework.NewStatus(framework.Success)
}
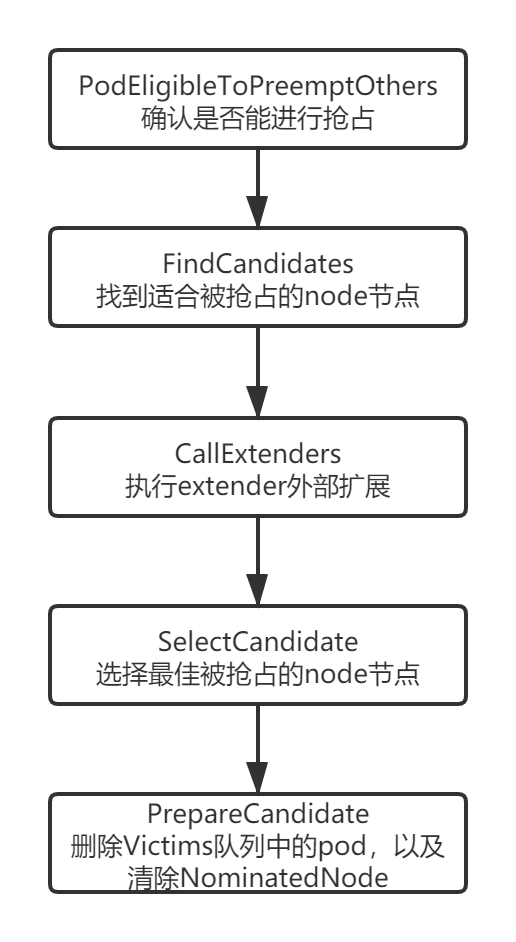
抢占的执行流程图如下:
代码路径:pkg/scheduler/framework/plugins/defaultpreemption/default_preemption.go
func (pl *DefaultPreemption) preempt(ctx context.Context, state *framework.CycleState, pod *v1.Pod, m framework.NodeToStatusMap) (string, error) {
cs := pl.fh.ClientSet()
ph := pl.fh.PreemptHandle()
//返回node列表
nodeLister := pl.fh.SnapshotSharedLister().NodeInfos()
pod, err := util.GetUpdatedPod(cs, pod)
if err != nil {
klog.Errorf("Error getting the updated preemptor pod object: %v", err)
return "", err
}
//确认抢占者是否能够进行抢占,如果对应的node节点上的pod正在优雅退出(Graceful Termination ),那么就不应该进行抢占
if !PodEligibleToPreemptOthers(pod, nodeLister, m[pod.Status.NominatedNodeName]) {
klog.V(5).Infof("Pod %v/%v is not eligible for more preemption.", pod.Namespace, pod.Name)
return "", nil
}
// 查找所有抢占候选者
candidates, err := FindCandidates(ctx, cs, state, pod, m, ph, nodeLister, pl.pdbLister)
if err != nil || len(candidates) == 0 {
return "", err
}
//若有 extender 则执行
candidates, err = CallExtenders(ph.Extenders(), pod, nodeLister, candidates)
if err != nil {
return "", err
}
// 查找最佳抢占候选者
bestCandidate := SelectCandidate(candidates)
if bestCandidate == nil || len(bestCandidate.Name()) == 0 {
return "", nil
}
// 在抢占一个node之前做一些准备工作
if err := PrepareCandidate(bestCandidate, pl.fh, cs, pod); err != nil {
return "", err
}
return bestCandidate.Name(), nil
}
preempt方法首先会去获取node列表,然后获取最新的要执行抢占的pod信息,接着分下面几步执行抢占:
- 调用PodEligibleToPreemptOthers方法,检查抢占者是否能够进行抢占,如果当前的pod已经抢占了一个node节点或者在被抢占node节点中有pod正在执行优雅退出,那么不应该执行抢占;
- 调用FindCandidates找到所有node中能被抢占的node节点,并返回候选列表以及node节点中需要被删除的pod;
- 若有 extender 则执行CallExtenders;
- 调用SelectCandidate方法在所有候选列表中找出最合适的node节点执行抢占;
- 调用PrepareCandidate方法删除被抢占的node节点中victim(牺牲者),以及清除NominatedNodeName字段信息;
PodEligibleToPreemptOthers
func PodEligibleToPreemptOthers(pod *v1.Pod, nodeInfos framework.NodeInfoLister, nominatedNodeStatus *framework.Status) bool {
if pod.Spec.PreemptionPolicy != nil && *pod.Spec.PreemptionPolicy == v1.PreemptNever {
klog.V(5).Infof("Pod %v/%v is not eligible for preemption because it has a preemptionPolicy of %v", pod.Namespace, pod.Name, v1.PreemptNever)
return false
}
//查看抢占者是否已经抢占过
nomNodeName := pod.Status.NominatedNodeName
if len(nomNodeName) > 0 {
if nominatedNodeStatus.Code() == framework.UnschedulableAndUnresolvable {
return true
}
//获取被抢占的node节点
if nodeInfo, _ := nodeInfos.Get(nomNodeName); nodeInfo != nil {
//查看是否存在正在被删除并且优先级比抢占者pod低的pod
podPriority := podutil.GetPodPriority(pod)
for _, p := range nodeInfo.Pods {
if p.Pod.DeletionTimestamp != nil && podutil.GetPodPriority(p.Pod) < podPriority {
// There is a terminating pod on the nominated node.
return false
}
}
}
}
return true
}
这个方法会检查该pod是否已经抢占过其他node节点,如果是的话就遍历节点上的所有pod对象,如果发现节点上有pod资源对象的优先级小于待调度pod资源对象并处于终止状态,则返回false,不会发生抢占。
接下来看FindCandidates方法:
FindCandidates
func FindCandidates(ctx context.Context, cs kubernetes.Interface, state *framework.CycleState, pod *v1.Pod,
m framework.NodeToStatusMap, ph framework.PreemptHandle, nodeLister framework.NodeInfoLister,
pdbLister policylisters.PodDisruptionBudgetLister) ([]Candidate, error) {
allNodes, err := nodeLister.List()
if err != nil {
return nil, err
}
if len(allNodes) == 0 {
return nil, core.ErrNoNodesAvailable
}
//找 predicates 阶段失败但是通过抢占也许能够调度成功的 nodes
potentialNodes := nodesWherePreemptionMightHelp(allNodes, m)
if len(potentialNodes) == 0 {
klog.V(3).Infof("Preemption will not help schedule pod %v/%v on any node.", pod.Namespace, pod.Name)
if err := util.ClearNominatedNodeName(cs, pod); err != nil {
klog.Errorf("Cannot clear 'NominatedNodeName' field of pod %v/%v: %v", pod.Namespace, pod.Name, err)
}
return nil, nil
}
if klog.V(5).Enabled() {
var sample []string
for i := 0; i < 10 && i < len(potentialNodes); i++ {
sample = append(sample, potentialNodes[i].Node().Name)
}
klog.Infof("%v potential nodes for preemption, first %v are: %v", len(potentialNodes), len(sample), sample)
}
//获取PDB对象,PDB能够限制同时终端的pod资源对象的数量,以保证集群的高可用性
pdbs, err := getPodDisruptionBudgets(pdbLister)
if err != nil {
return nil, err
}
//寻找符合条件的node,并封装成candidate数组返回
return dryRunPreemption(ctx, ph, state, pod, potentialNodes, pdbs), nil
}
FindCandidates方法首先会获取node列表,然后调用nodesWherePreemptionMightHelp方法来找出predicates 阶段失败但是通过抢占也许能够调度成功的nodes,因为并不是所有的node都可以通过抢占来调度成功。最后调用dryRunPreemption方法来获取符合条件的node节点。
dryRunPreemption
func dryRunPreemption(ctx context.Context, fh framework.PreemptHandle, state *framework.CycleState,
pod *v1.Pod, potentialNodes []*framework.NodeInfo, pdbs []*policy.PodDisruptionBudget) []Candidate {
var resultLock sync.Mutex
var candidates []Candidate
checkNode := func(i int) {
nodeInfoCopy := potentialNodes[i].Clone()
stateCopy := state.Clone()
//找到node上被抢占的pod,也就是victims
pods, numPDBViolations, fits := selectVictimsOnNode(ctx, fh, stateCopy, pod, nodeInfoCopy, pdbs)
if fits {
resultLock.Lock()
victims := extenderv1.Victims{
Pods: pods,
NumPDBViolations: int64(numPDBViolations),
}
c := candidate{
victims: &victims,
name: nodeInfoCopy.Node().Name,
}
candidates = append(candidates, &c)
resultLock.Unlock()
}
}
parallelize.Until(ctx, len(potentialNodes), checkNode)
return candidates
}
这里会开启16个线程调用checkNode方法,checkNode方法里面会调用selectVictimsOnNode方法来检查这个node是不是能被执行抢占,如果能执行抢占返回的pods表示需要删除的节点,然后封装成candidate添加到candidates列表中返回。
selectVictimsOnNode
func selectVictimsOnNode(
ctx context.Context,
ph framework.PreemptHandle,
state *framework.CycleState,
pod *v1.Pod,
nodeInfo *framework.NodeInfo,
pdbs []*policy.PodDisruptionBudget,
) ([]*v1.Pod, int, bool) {
var potentialVictims []*v1.Pod
//移除node节点的pod
removePod := func(rp *v1.Pod) error {
if err := nodeInfo.RemovePod(rp); err != nil {
return err
}
status := ph.RunPreFilterExtensionRemovePod(ctx, state, pod, rp, nodeInfo)
if !status.IsSuccess() {
return status.AsError()
}
return nil
}
//将node节点添加pod
addPod := func(ap *v1.Pod) error {
nodeInfo.AddPod(ap)
status := ph.RunPreFilterExtensionAddPod(ctx, state, pod, ap, nodeInfo)
if !status.IsSuccess() {
return status.AsError()
}
return nil
}
// 获取pod的优先级,并将node中所有优先级低于该pod的调用removePod方法pod移除
podPriority := podutil.GetPodPriority(pod)
for _, p := range nodeInfo.Pods {
if podutil.GetPodPriority(p.Pod) < podPriority {
potentialVictims = append(potentialVictims, p.Pod)
if err := removePod(p.Pod); err != nil {
return nil, 0, false
}
}
}
//没有优先级低的node,直接返回
if len(potentialVictims) == 0 {
return nil, 0, false
}
if fits, _, err := core.PodPassesFiltersOnNode(ctx, ph, state, pod, nodeInfo); !fits {
if err != nil {
klog.Warningf("Encountered error while selecting victims on node %v: %v", nodeInfo.Node().Name, err)
}
return nil, 0, false
}
var victims []*v1.Pod
numViolatingVictim := 0
//将potentialVictims集合里的pod按照优先级进行排序
sort.Slice(potentialVictims, func(i, j int) bool { return util.MoreImportantPod(potentialVictims[i], potentialVictims[j]) })
//将pdb的pod分离出来
//基于 pod 是否有 PDB 被分为两组 violatingVictims 和 nonViolatingVictims
//PDB:https://kubernetes.io/docs/concepts/workloads/pods/disruptions/
violatingVictims, nonViolatingVictims := filterPodsWithPDBViolation(potentialVictims, pdbs)
reprievePod := func(p *v1.Pod) (bool, error) {
if err := addPod(p); err != nil {
return false, err
}
fits, _, _ := core.PodPassesFiltersOnNode(ctx, ph, state, pod, nodeInfo)
if !fits {
if err := removePod(p); err != nil {
return false, err
}
// 加入到 victims 中
victims = append(victims, p)
klog.V(5).Infof("Pod %v/%v is a potential preemption victim on node %v.", p.Namespace, p.Name, nodeInfo.Node().Name)
}
return fits, nil
}
//删除pod,并记录删除个数
for _, p := range violatingVictims {
if fits, err := reprievePod(p); err != nil {
klog.Warningf("Failed to reprieve pod %q: %v", p.Name, err)
return nil, 0, false
} else if !fits {
numViolatingVictim++
}
}
//删除pod
for _, p := range nonViolatingVictims {
if _, err := reprievePod(p); err != nil {
klog.Warningf("Failed to reprieve pod %q: %v", p.Name, err)
return nil, 0, false
}
}
return victims, numViolatingVictim, true
}
这个方法首先定义了两个方法,一个是removePod,另一个是addPod,这两个方法都差不多,如果是removePod就会将pod从node中移除,然后修改node一些属性,如将Requested.MilliCPU、Requested.Memory中减去,表示已用资源大小,将该pod从node节点的Pods列表中移除等等。
回到selectVictimsOnNode继续往下,会遍历node里面的pod列表,如果找到优先级小于抢占pod的就加入到potentialVictims集合中,并调用removePod方法,将当前被遍历的pod从node中移除。
接着会调用PodPassesFiltersOnNode方法,这个方法会运行两次。第一次会调用addNominatedPods方法将调度队列中找到节点上优先级大于或等于当前pod资源对象的nominatedPods加入到nodeInfo对象中,然后执行FilterPlugin列表;第二次则直接执行FilterPlugins列表。之所以要这么做,是由于亲和性的关系,k8s需要判断当前调度的pod亲和性是否依赖了nominatedPods。
继续往下会对potentialVictims按照优先级进行排序,优先级高的在前面。
接着会调用filterPodsWithPDBViolation方法,将 PDB 约束的 Pod和未约束的Pod分离成两个组,然后会分别遍历violatingVictims和nonViolatingVictims调用reprievePod方法对pod进行移除。这里我们在官方文档也可以看其设计理念,PodDisruptionBudget 是在抢占中被支持的,但不提供保证,然后将被移除的pod添加到victims列表中,并记录好被删除的删除pod个数,最后返回。
到这里整个FindCandidates方法就探索完毕了,还是比较长的,我们继续回到preempt方法中往下看,SelectCandidate方法会查找最佳抢占候选者。
SelectCandidate
func SelectCandidate(candidates []Candidate) Candidate {
if len(candidates) == 0 {
return nil
}
if len(candidates) == 1 {
return candidates[0]
}
victimsMap := candidatesToVictimsMap(candidates)
// 选择1个 node 用于 schedule
candidateNode := pickOneNodeForPreemption(victimsMap)
for _, candidate := range candidates {
if candidateNode == candidate.Name() {
return candidate
}
}
klog.Errorf("None candidate can be picked from %v.", candidates)
return candidates[0]
}
这个方法里面会调用candidatesToVictimsMap方法做一个name和victims映射map,然后调用pickOneNodeForPreemption执行主要过滤逻辑。
pickOneNodeForPreemption
func pickOneNodeForPreemption(nodesToVictims map[string]*extenderv1.Victims) string {
//若该 node 没有 victims 则返回
if len(nodesToVictims) == 0 {
return ""
}
minNumPDBViolatingPods := int64(math.MaxInt32)
var minNodes1 []string
lenNodes1 := 0
//寻找 PDB violations 数量最小的 node
for node, victims := range nodesToVictims {
numPDBViolatingPods := victims.NumPDBViolations
if numPDBViolatingPods < minNumPDBViolatingPods {
minNumPDBViolatingPods = numPDBViolatingPods
minNodes1 = nil
lenNodes1 = 0
}
if numPDBViolatingPods == minNumPDBViolatingPods {
minNodes1 = append(minNodes1, node)
lenNodes1++
}
}
//如果最小的node只有一个,直接返回
if lenNodes1 == 1 {
return minNodes1[0]
}
minHighestPriority := int32(math.MaxInt32)
var minNodes2 = make([]string, lenNodes1)
lenNodes2 := 0
// 找到node里面pods 最高优先级最小的
for i := 0; i < lenNodes1; i++ {
node := minNodes1[i]
victims := nodesToVictims[node]
highestPodPriority := podutil.GetPodPriority(victims.Pods[0])
if highestPodPriority < minHighestPriority {
minHighestPriority = highestPodPriority
lenNodes2 = 0
}
if highestPodPriority == minHighestPriority {
minNodes2[lenNodes2] = node
lenNodes2++
}
}
if lenNodes2 == 1 {
return minNodes2[0]
}
// 找出node里面Victims列表优先级加和最小的
minSumPriorities := int64(math.MaxInt64)
lenNodes1 = 0
for i := 0; i < lenNodes2; i++ {
var sumPriorities int64
node := minNodes2[i]
for _, pod := range nodesToVictims[node].Pods {
sumPriorities += int64(podutil.GetPodPriority(pod)) + int64(math.MaxInt32+1)
}
if sumPriorities < minSumPriorities {
minSumPriorities = sumPriorities
lenNodes1 = 0
}
if sumPriorities == minSumPriorities {
minNodes1[lenNodes1] = node
lenNodes1++
}
}
if lenNodes1 == 1 {
return minNodes1[0]
}
// 找到node列表中需要牺牲的pod数量最小的
minNumPods := math.MaxInt32
lenNodes2 = 0
for i := 0; i < lenNodes1; i++ {
node := minNodes1[i]
numPods := len(nodesToVictims[node].Pods)
if numPods < minNumPods {
minNumPods = numPods
lenNodes2 = 0
}
if numPods == minNumPods {
minNodes2[lenNodes2] = node
lenNodes2++
}
}
if lenNodes2 == 1 {
return minNodes2[0]
}
//若多个 node 的 pod 数量相等,则选出高优先级 pod 启动时间最短的
latestStartTime := util.GetEarliestPodStartTime(nodesToVictims[minNodes2[0]])
if latestStartTime == nil {
klog.Errorf("earliestStartTime is nil for node %s. Should not reach here.", minNodes2[0])
return minNodes2[0]
}
nodeToReturn := minNodes2[0]
for i := 1; i < lenNodes2; i++ {
node := minNodes2[i]
earliestStartTimeOnNode := util.GetEarliestPodStartTime(nodesToVictims[node])
if earliestStartTimeOnNode == nil {
klog.Errorf("earliestStartTime is nil for node %s. Should not reach here.", node)
continue
}
if earliestStartTimeOnNode.After(latestStartTime.Time) {
latestStartTime = earliestStartTimeOnNode
nodeToReturn = node
}
}
return nodeToReturn
}
这个方法看起来很长,其实逻辑十分的清晰:
- 找出最少的的PDB violations的node节点,如果找出的node集合大于1则往下走;
- 找出找到node里面pods 最高优先级最小的node,如果还是找出的node集合大于1则往下走;
- 找出node里面Victims列表优先级加和最小的,如果还是找出的node集合大于1则往下走;
- 找到node列表中需要牺牲的pod数量最小的,如果还是找出的node集合大于1则往下走;
- 若多个 node 的 pod 数量相等,则选出高优先级 pod 启动时间最短的,然后返回。
然后preempt方法往下走到调用PrepareCandidate方法:
PrepareCandidate
func PrepareCandidate(c Candidate, fh framework.FrameworkHandle, cs kubernetes.Interface, pod *v1.Pod) error {
for _, victim := range c.Victims().Pods {
if err := util.DeletePod(cs, victim); err != nil {
klog.Errorf("Error preempting pod %v/%v: %v", victim.Namespace, victim.Name, err)
return err
}
if waitingPod := fh.GetWaitingPod(victim.UID); waitingPod != nil {
waitingPod.Reject("preempted")
}
fh.EventRecorder().Eventf(victim, pod, v1.EventTypeNormal, "Preempted", "Preempting", "Preempted by %v/%v on node %v",
pod.Namespace, pod.Name, c.Name())
}
metrics.PreemptionVictims.Observe(float64(len(c.Victims().Pods)))
//移除低优先级 pod 的 Nominated,更新这些 pod,移动到 activeQ 队列中,让调度器为这些 pod 重新 bind node
nominatedPods := getLowerPriorityNominatedPods(fh.PreemptHandle(), pod, c.Name())
if err := util.ClearNominatedNodeName(cs, nominatedPods...); err != nil {
klog.Errorf("Cannot clear 'NominatedNodeName' field: %v", err)
// We do not return as this error is not critical.
}
return nil
}
这个方法会调用DeletePod删除Victims列表里面的pod,然后将这些pod中的Status.NominatedNodeName属性置空。
到这里整个抢占过程就讲解完毕了~
总结
看完这一篇我们对k8s的抢占可以说有一个全局的了解,心里应该非常清楚k8s在抢占的时候会发生什么,例如什么时候时候哪些pod会执行抢占,以及为什么执行抢占,以及抢占了哪些pod的资源,对于被抢占的pod会不会重新被调度等等。
Reference
https://kubernetes.io/docs/concepts/scheduling-eviction/scheduling-framework/
https://kubernetes.io/docs/concepts/configuration/pod-priority-preemption/
https://kubernetes.io/docs/concepts/configuration/pod-overhead/
https://kubernetes.io/docs/concepts/workloads/pods/disruptions/
https://kubernetes.io/docs/tasks/run-application/configure-pdb/
https://kubernetes.io/docs/tasks/configure-pod-container/assign-pods-nodes-using-node-affinity/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号