【图片匹配】--- SIFT_Opencv3.1.0_C++_ubuntu
最近在捣鼓图片相似性匹配算法。这里先说一点必要的题外话:
如果是在同一个object不同角度拍摄的多张图片中,使用SIFT可以有不错的效果;
如果是寻找类别相同的图片(可能不是同一object),SIFT是无效的。
前言:
1 需要安装好opencv3.1.0 + opencv_contrib(放到 opencv主文件夹的module文件夹中)。
2 可以使用IDE 比如:Codeblocks or Eclipse etc 配置好opencv开发所需要的 头文件 + lib so 库文件。
但是我这里是直接手写的 g++ 编译命令,这样省事儿,可以方便展示。这里不得不吐槽一下,网上一大堆 搓逼教程,乱配置一气,有用的没用的全抄上,而且3.1.0中的imshow等基础的函数都已经换了头文件了。并不在highgui中了。所以我就自己手写了 编译命令,用什么加什么。
代码如下:
#include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/opencv.hpp> //头文件 #include <opencv2/xfeatures2d.hpp> #include <opencv2/imgcodecs.hpp> #include <opencv2/highgui/highgui.hpp> using namespace cv; //包含cv命名空间 using namespace std; int main() { //Create SIFT class pointer Ptr<Feature2D> f2d = xfeatures2d::SIFT::create(); //读入图片 Mat img_1 = imread("kebe1.jpg"); Mat img_2 = imread("kebe2.jpg"); //Detect the keypoints vector<KeyPoint> keypoints_1, keypoints_2; f2d->detect(img_1, keypoints_1); f2d->detect(img_2, keypoints_2); //Calculate descriptors (feature vectors) Mat descriptors_1, descriptors_2; f2d->compute(img_1, keypoints_1, descriptors_1); f2d->compute(img_2, keypoints_2, descriptors_2); //Matching descriptor vector using BFMatcher BFMatcher matcher; vector<DMatch> matches; matcher.match(descriptors_1, descriptors_2, matches); //绘制匹配出的关键点lopencv_core Mat img_matches; drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_matches); imshow("【match图】", img_matches); //等待任意按键按下 waitKey(0); } //g++ sift_match.cpp -o output -L/usr/local/lib -lopencv_imgcodecs -lopencv_highgui -lopencv_xfeatures2d -lopencv_features2d -lopencv_core -I/usr/local/include
文件夹下有两张图片,使用最下面注释的 编译命令直接运行
./output 即可。
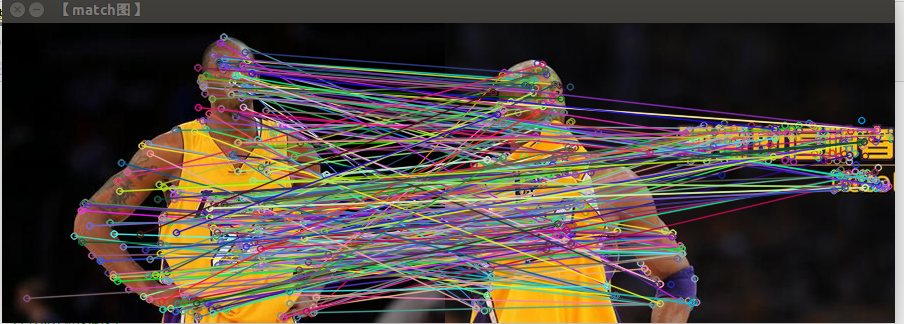
发现这也不咋准啊! 当然我使用的不是同一张皂片的不同角度,只是觉得差不多。
下一步,打算校准 + 具体实现使用SIFT来衡量图片的相似度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号