
[学术论文] 我与无人机多角度遥感的缘分
关键词:无人机 多角度遥感 BRDF 反射率 各向异性
作者:李二
日期:02/06/2021 - 03/06/2021
首先说明,这并非一篇言情小说,而是一篇饱含深情的故事。
1. 初识
那是在七年前的大约这个时候,我刚刚大学毕业来师大读研,尚未入学,便随老师和师兄们来到承德塞罕坝开展实验。清晰的记得当时闫凯师兄是飞手,虽前一年刚经历了根河摔机,却依然颇有自信地拿起遥控器来操控无人机。我当时自然稚嫩青涩,即使让我简单碰一下,也会有一些紧张感。
彼时的无人机行业尚处于刚起步阶段,DJI远没有现在这么广为人知,穆老师在北京的一下专门生产无人机的公司购买的设备,个头并不小,看着也有点危险,操控性也不尽如人意。

那个时候,组内的老师就看到了无人机这种灵活的遥感平台在多角度遥感中的潜在价值。似乎是2012抑或2013年购买之后,就多次开展无人机遥感测试与实验,算是国内最早的一批涉及无人机遥感的研究团队了。
在RAMM组的时候,阎老师一直期望通过地面与近地面多角度观测,更为精细地挖掘多角度信息,改善现有BRDF模型存在的一些问题。一直盼望着我们能够获得一套很好的多角度数据。
漆师兄写了一个计算无人机多角度航线的小软件,非常实用。根据当地位置和时间,能够方便地计算出
gonimetric pattern(半球面)和cross pattern(十字)类型多角度航线(主平面和垂直主平面)的航点位置以及云台应旋转的角度,这样就能准确地控制天顶角和方位角了。
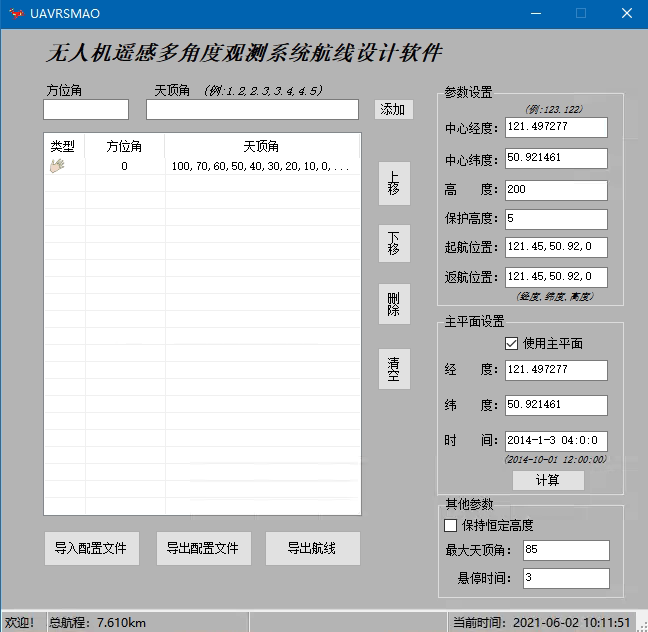
天不遂人愿,每次执行多角度飞行时,无人机总会莫名其妙地拍到了其他非感兴趣的地物,也就是角度每次都不太对劲。我们怀疑可能是三个原因造成的:1. 云台旋转的角度不准确; 2. 无人机定位精度太低;3. 航点半径设置过大抑或是风的问题。
为了评估云台旋转角度是否准确的问题,刚开始我买了个望远镜,想飞行过程中仔细看看,后发现用处不大。我们在室内通过三角几何关系精确获取了无人机相机光心应观测的位置,多次测试后发现并无太大问题。
无人机定位精度的问题我们当时也没有想到比较好的办法在野外进行测试评估,那款无人机的真实航点信息并无法导出,只有预设航点位置信息。后来在论文审稿阶段有评审专家提出这个问题,我采用的是重建的正射影像贴图在Google Earth上,大约还好(不过那是后话了,因为采用的是DJI了)。当时我们主要认为是定位精度的问题。
航点半径印象中一般设置的是3-5米,也就是说,只要无人机到达航点附近的圆圈内,相机就被触发拍摄了。这应该也是一个重要问题。 可以尽量设置小一些,不过即使如此,由于定位精度不准确,这自然也没有太大意义了。
后来我们意识到,飞行高一些,footprint自然变大了,即便定位和旋转角度不准确,那么依然有可能把我们所感兴趣的区域包含进去。但是即便如此,依然没有让我得到一套完整(即包含主平面和垂直主平面)的多角度数据。
至少,在2014-2015这两年的时间里,我慢慢地认识到了它的难以接触,也逐渐感觉它越来越吸引人。
有没有办法准确地获取每个样方甚至每个像元的实际观测角度?
有没有办法(半)自动化地实现每幅影像对应区域的提取?
怎么样进行辐射校正,获取双向反射率? 这些问题当时都困扰着我。我决定,一定要想办法解决无人机多角度观测问题。
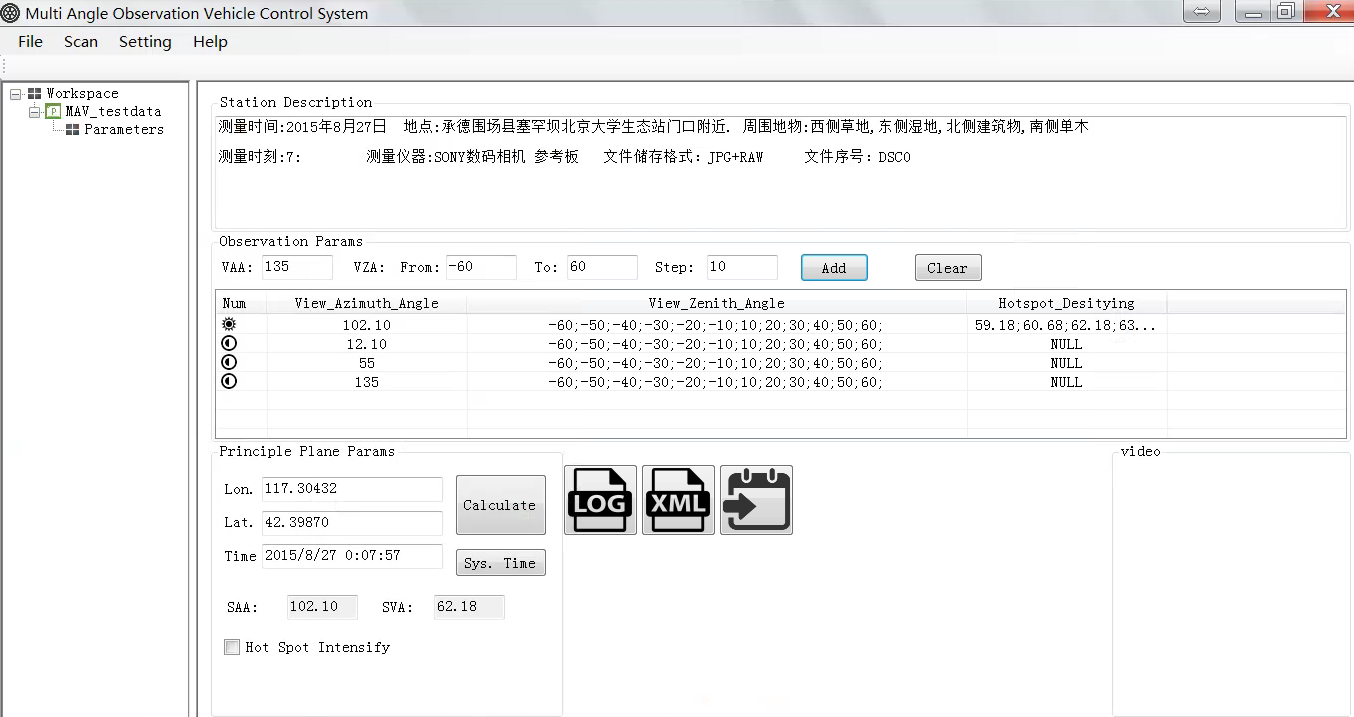
顺便说一下,我同时也做了地面多角度车的软件,更加加深了我与近地面多角度遥感的缘分,这是我的小得意之作。
2. 相知
慢慢地,我也成长为组内飞行无人机的担当了,也越发娴熟,但始终绷在内心的那颗弦就是,获取一套完整的多光谱多角度影像数据。
2016年,我和一家无人机公司的员工一起在北京房山永定河附近进行多角度飞行试验,当时我们采用的是Terrcam miniMCA多光谱相机,这是一款极不稳定的相机,震动稍微一大,就接触不良,无法工作了。
小贾工程师他们弄了一种防震胶贴,将相机粘在云台上面,然后再用扎带固定,进而调整重心之类的,至少是能用了。
小翟工程师是飞行行家,我画好航线,他负责操控(另外一架更大的无人机了)。上午去的试验场,又是出现各种小问题,直到下午三点多才飞起来。只是那个时间太阳天顶角已经将近60°了,基本观测不到热点了。
挺奇怪的,在北京附近,无人机的GPS模块似乎也规矩了许多,于是有了几年来的第一组相对完好的多角度多光谱数据。不过缺憾依然有:
由于时间、人员、仪器等各方面原因,仅仅有一个样地的一个时相的数据; 由于太阳原因,我们没有观测到热点。 不过,至少我能着手好好处理数据了。
我对Agisoft PhotoScan(现已改名为Metashape)这个摄影测量软件还算比较熟悉,尤其是它提供了API接口,我们能够方便地调用其中的大量函数。
但是其中的各种坐标系转换着实让我废了很大的力气,我花了好久时间才搞清楚如何将重建的三维点投影到影像中以及如何将影像像元计算对应的三维点位置。基于此,我可以实现像元的实际观测几何计算以及不同影像中相同区域的提取。
我们也花了一些力气对相机进行定标,采用积分光源进行绝对定标以及采用标准反射率参考板进行相对定标的方式都做了。
有了这个数据之后,其实我个人并未想好做做点什么事才好,因为日常的时间一种在弄植被盖度相关的算法,所以对于改进BRDF模型之类的事情不太感冒。所以后面各种看文献以及与人讨论,做点什么事情合适。
在与刘守阳博士和李文娟博士的几次讨论中,文娟师姐当时在分析作物的reproductive organ对冠层反射率的影响(现已发表在RSE上),我想不妨做一下森林背景各向异性对于冠层的影响到底如何。
其实很早以前大家就已经意识到了背景影响挺重要的,但是找了一圈文献,也没有一种便捷地提取背景各向异性特征的方法,更没有细致分析不同太阳角度、冠层结构、土壤特性条件下,不同观测角度时土壤背景的影响如何。
鉴于此,我决定要发展一种提取土壤背景各向异性的方法,同时分析它的影响。
3. “七年”之痒
接下来开始了比较繁琐的数据处理了,我把这个miniMCA了解地很透彻了,然后数据处理也做的差不多了,最终形成了一个自动提取土壤各向异性的技术流程,然后加上了三维场景构建与三维辐射传输模型模拟分析,并整理为一篇文章。
文章一开始投稿了RSE,几个月后,收到了审稿意见,陈镜明主编说,有大修意见也有拒稿意见,但是他觉得这个工作很重要也挺有价值,于是给了大修。期望我们能够增加一些样方,增加一些太阳几何条件,增加地面验证数据,让结论更为sound。
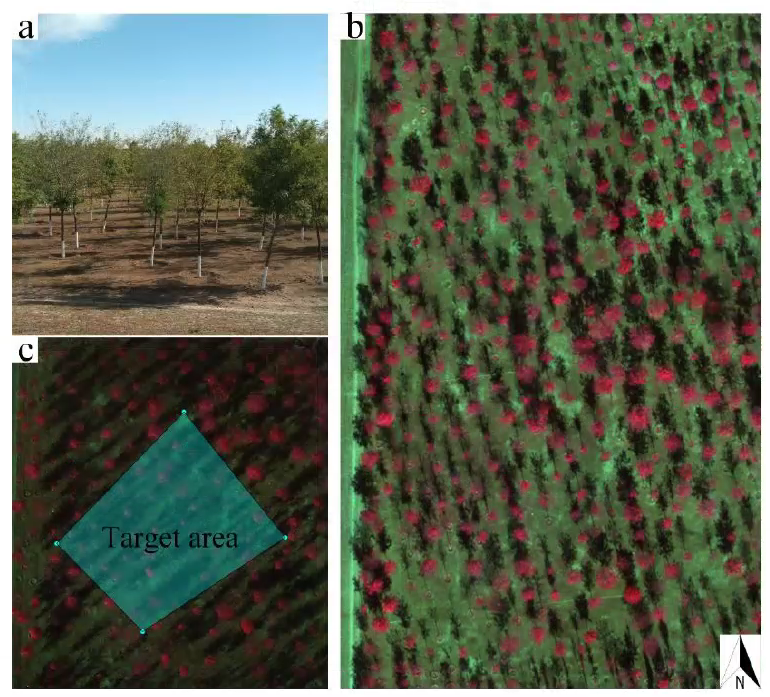
然而,此时我还在国外,并不方便在这边开展实验。穆老师积极联系公司制造我自行设计的地面多角度观测架(手动式),顺便购买了两个新的小型MAPIR多光谱相机(单价1万),而且组织师弟师妹们在怀来进行无人机多角度实验。
师弟师妹们(陈珺、李伟华、李益、刘鑫莉)非常靠谱,用DJI的无人机,三四天之内就获取了3个样地各两组多角度观测数据集,包含无人机多角度、地面多角度、地面配套参数测量等。应该说,这次数据非常全面了。特别感谢他们。

我又花了一个月的时间仔细整理数据、处理数据、模拟分析等,但是发现了一个极为关键的问题:
这款多光谱相机因为采用的是拜耳阵列的方式,虽然镜头上滤光片,但是其传感器单元采集到的红光与绿光波段混入了大量近红外信号,无法使用,也没有办法剔除,仅有近红外波段的信号是可信的。
我极为郁闷,但只有硬着头皮用现有的NIR波段数据去修改文章,只是依然担心主编和审稿人会因为仅有一个波段的问题,提出进一步的实验要求。
经过3个月审稿,果不其然,主编和审稿人都说为什么没有红绿波段呢?期望我们加入。那个时间已经是冬天了,无法开展实验了,跟主编说过之后,陈老师答应继续给我们一些时间。可是,后来疫情来了,也无法进行实验了,便请求陈老师撤稿了。
合作作者Jan Pisek建议投ISPRS P&RS,这是比较适合的。 2020年11月份,我将RSE审稿人要求修改的其他部分修改完成之后,投稿到了ISPRS。
ISPRS在定量遥感这块没有RSE要求的那么严格,因此还算顺利,4个审稿人给的意见都比较正面,我修改的也十分认真,尽可能最大限度地在各方面让审稿人满意。总共花了6个月的时间,论文被顺利接收了。
磕磕绊绊,终于将多角度遥感观测的初步问题解决了一些。从2014年到2021年,正好七年时间,伴随着这篇论文的发表。也算是顺利地度过了七年之痒。
只是,迟到的发表还被认可吗?其他比我们做的晚的团队似乎也已经把我们落下。幸好,不同团队关注的重点以及具体研究的方向并不相同,我们可以在各自的研究目标下做出不同的东西。
4. 相守
我想,我已经fall in love with 无人机多角度遥感了,我们未来还有很多事情要做,还有很多路要走。
我们已经尝试了多角度高光谱成像,只是目前的数据仍不完善,期待着用完整的无人机数据以及LiDAR和其他配套数据构建一个良好的数据集,并作出初步处理,以数据文章的形式公布和分享,方便所有感兴趣的学者使用;
我们也已经开始做一套metashape插件,将多角度数据处理的整个流程直接集成进去,同时增加一些其他的功能。
我们也在尝试其他工作,比如***(暂且不说了,等做的差不多再汇报吧)。
我盼望着自己,能够做的更加深入,能够长期与无人机多角度一起,走下去。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号