

20191305李天琦第四章学习笔记
20191305李天琦第四章学习笔记
并发编程
摘要:本章论述了并发编程,介绍了并行计算的概念,指出了并行计算的重要性;比较了顺序算法与并行算法,以及并行性与并发性;解释了线程的原理及其相对于进程的优势;通过示例介绍了 Pthread 中的线程操作,句括线程管理函数。互斥量、连接、条件变量和屏障等线程同步工具;通过具体示例演示了如何使用线程进行并发编程,包括矩阵计算、快速排序和用并发线程求解线性方程组等方法;解释了死锁问题,并说明了如何防止并发程序中的死锁问题;讨论了信号量,并论证了它们相对于条件变量的优点;还解释了支持Linux 中线程的独特方式。编程项目是为了实现用户级线程。它提供了一个基础系统来帮助读者开始工作。这个基础系统支持并发任务的动态创建、执行和终止,相当干在某个进程的同一地址空间中执行线程。读者可通过该项目实现线程同步的线程连接、互斥量和信号量,并演示它们在并发程序中的用法。该编程项目会让读者更加深入地了解多任务处理、线程同步和并发编程的原理及方法。
1.并行
(1)顺序算法和并行算法
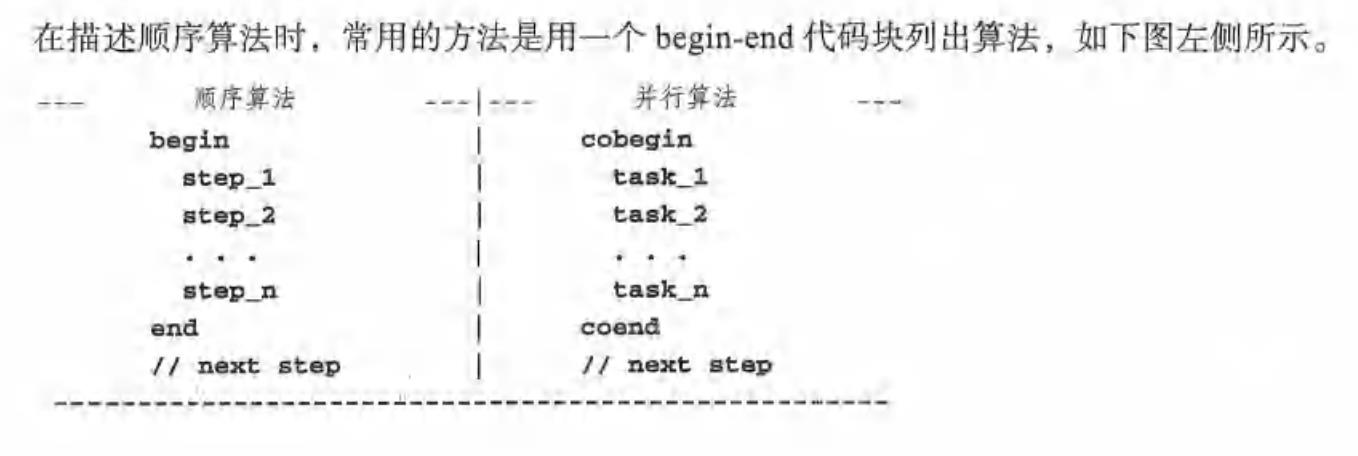
(2)并行性与并发性
并行算法只识别可并行执行的任务,但是它没有规定如何将任务映射到处理组件。在理想情况下,并行算法中的所有任务都应该同时实时执行。然而,真正的并行执行只能在有多个处理组件的系统中实现,比如多处理器或多核系统。在单 CPU 系统中,一次只能执行一个任务。在这种情况下,不同的任务只能并发执行、即在逻辑上并行执行。在单CPU系统中,并发性是通过多任务处理来实现的。
2.线程
(1)线程的原理
线程是某进程同一地址空间上的独立执行单元。创建某个进程就是在一个唯一地址空间创建一个主线程。当某进程开始时,就会执行该进程的主线程。如果只有一个主线程,那么进程和线程实际上并没有区别。但是,主线程可能会创建其他线程。每个线程又可以创建更多的线程等。
(2)线程的优点
1.线程创建和切换速度更快;
2.线程的相应速度更快;
3.线程更适合并行计算;
(3)线程的缺点
(1)由于地址空间共享,线程需要来自用户的明确同步。
(2)许多库函数可能对线程不安全,例如传统 strtok()函数将一个字符串分成一连串令牌。通常,任何使用全局变量或依赖于静态内存内容的函数,线程都不安全。为了使库函数适应线程环境,还需要做大量的工作。
(3)在单CPU系统上,使用线程解决问题实际上要比使用顺序程序慢,这是由在运行时创建线程和切换上下文的系统开销造成的。
3.线程管理函数
(1)创建线程
使用pthread_create()函数创建线程。
int prhread_create (pthread_t *pthread_id,pthread_attr_t *attr,
Void *(*func)(void *), void *arg);
如果成功则返回0,如果失败则返回错误代码。其中,attr参数最复杂。下面给出了attr参数的使用步骤。
1.定义一个pthread属性变量 pthread_attr_t attr。
2.用pthread_attr_init(&attr)初始化属性变量。
3.设置属性变量并在 pthread_create()调用中使用。
4.必要时,通过 pthread_attr_destroy(&attr)释放 attr资源。
(2)线程ID
线程ID是一种不透明的数据类型,取决于实现情况。因此,不应该直接比较线程ID。如果需要,可以使用pthread_equal()函数对线程ID进行比较。
int pthread_equal (pthread_t t1, pthread_t t2);
如果是不同的线程,则返回0,否则返回非0。
(3)线程终止
线程函数结束后,线程即终止。或者,线程可以调用函数
int pthread_exit (void *status);
进行显示终止,其中状态是线程的退出状态。通常,0退出值表示正常终止,非0只表示异常终止。
(4)线程连接
一个线程可以等待另一个线程的终止,通过:
int pthread_join (pthread_t thread,void **status_ptr);
终止线程退出状态以status_ptr返回。
4.线程同步
(1)互斥量
最简单的同步工具是锁,它允许执行实体仅在有锁的情况下才能继续执行。在Pthread中,锁被称为互斥量。在使用之前必须对他们进行初始化。
静态方法:
pthread_mutex_t m = PTHREAD_MUTEX_INITIALIZER
定义互斥量m,并使用默认属性对其进行初始化。
动态方法:使用pthread_mutex_init()函数,可通过attr参数设置互斥属性。
pthread_mutex_init(pthread_mutex_t *m,pthread_mutexattr_t,*attr);
(2)死锁预防
互斥量使用封锁协议。如果某线程不能获取互斥量,就会被阻塞,等待互斥量解锁后再继续。在任何封锁协议中,误用加锁可能会产生一些问题。最常见和突出的问题是死锁。
有多种方法可以解决可能的死锁问题,其中包括死锁预防、死锁规避、死锁检测和恢复等。
在实际系统中,唯一可行的方法是死锁预防,试图在设计并行算法时防止死锁的发生。一种简单的死锁预防方法是对互斥量进行排序,并确保每个线程只在一个方向请求互斥量,这样请求序列中就不会有循环。
(3)条件变量
作为锁,互斥量仅用于确保线程只能互斥地访问临界区中的共享数据对象。条件变量提供了一种线程协作的方法。在Pthread中,使用类型pthread_cond_t来声明条件变量,而且必须在使用前进行初始化。
静态方法
pthread_cond_t con = PTHREAD_COND_INITALLIZER;
动态方法
使用pthread_cond_init()函数,通过attr参数设置条件变量。
在互斥量的临界区中,线程可通过以下函数使用条件变量来相互协作。
pthread_cond_wait(conditlon,mutex):该函数会阻塞调用线程,直到发出指定条件的信号。当互斥量被加锁时、应调用该例程。它会在线程等待时自动释放互斥量。互斥量将在接收到信号并唤醒阻塞的线程后自动锁定。
pthread cond signal(condition);该函数用来发出信号,即唤醒正在等待条件变量的线程或解除阻塞。它应在互斥量被加锁后调用,而且必须解锁互斥量才能完成pthread_cond_wait ()。
pthread cond broadcast(condition)∶该函数会解除被阻塞在条件变量上的所有线程阻塞。所有未阻塞的线程将争用同一个互斥量来访问条件变量。它们的执行顺序取决于线程调度。
(4)信号量
信号量和条件变量之间的主要区别是,前者包含一个计数器,可操作计数器,测试计数器值以做出决策等,所有这些都是临界区的原子操作或基本操作,而后者需要一个特定的互斥量来执行临界区。在 Pthreads 中,互斥量严格用于封锁。而条件变量可用于线程协作。相反,可以把使用初始值1计算信号量当作锁。带有其他初始值的信号量可用于协作。因此,信号量比条件变量更通用、更灵活。下面的示例说明了信号量相对于条件变量的优势。
(5)屏障
线程连接操作允许某线程(通常是主线程)等待其他线程终止。在等待的所有线程都终止后,主线程可创建新线程来继续执行并行程序的其余部分。创建新线程需要系统开销。在某些情况下,保持线程活动会更好,但应要求它们在所有线程都达到指定同步点之前不能继续活动。
生产者—消费者问题
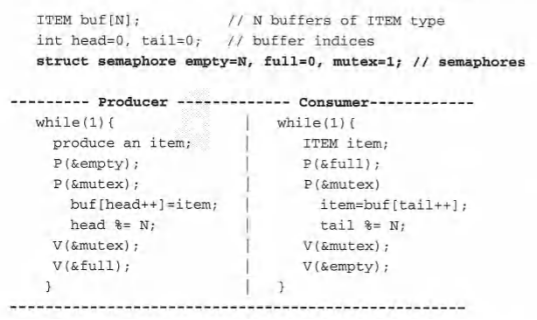
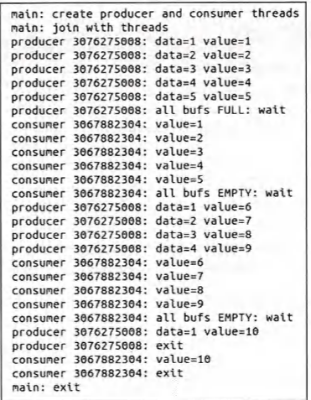
我们将使用线程和条件变量来实现一个简化版的生产者-消费者问题,也称有限缓冲问题。生产者-消费者问题通常将进程定义为执行实体,可看作当前上下文中的线程。下面是该问题的定义。
一系列生产者和消费者进程共享数量有限的缓冲区。每个缓冲区每次有一个特定的项目。最开始,所有缓冲区都是空的。当一个生产者将一个项目放人一个空缓冲区时,该缓冲区就会变满。当一个消费者从一个满的缓冲区中获取一个项目时,该缓冲区就会变空。如果没有空缓冲区,生产者必须等待。同样,如果没有满缓冲区,则消费者必须等待。此外,当等待事件发生时、必须允许等待进程继续。
代码实践:
4.1.c
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#define N 4
int A[N][N], sum[N];
void *func(void *arg){
int j,row;
pthread_t tid = pthread_self();
row = (int)arg;
printf("Thread %d [%lu] computes sum of row %d\n",row,tid,row);
for (j=0;j<N;j++)
sum[row]+=A[row][j];
printf("Thread %d [%lu] done: sum[%d] = %d\n",row,tid,row,sum[row]);
pthread_exit((void *)0);
}
int main(int argc,char *argv[]){
pthread_t thread[N];
int i,j,r,total=0;
void *status;
printf("Main:initize A matrix\n");
for (i=0;i<N;i++){
sum[i]=0;
for(j=0;j<N;j++){
A[i][j] = i*N +j+1;
printf("%4d",A[i][j]);
}
printf("\n");
}
printf("Main:create %d thread\n",N);
for(i=0;i<N;i++){
pthread_create(&thread[i],NULL,func, (void *)i);
}
printf("Main:try to join with threads\n");
for(i=0;i<N;i++){
pthread_join(thread[i],&status);
printf("Main: joined with %d [%lu]: status=%d\n",i,thread[i],(int)status);
}
printf("Main: compute and print toatal sum: ");
for(i=0;i<N;i++)
total+=sum[i];
printf("total =%d\n",total);
pthread_exit(NULL);
}
4.2.c
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
typedef struct{
int upperbound;
int lowerbound;
}PARM;
#define N 10
int a[N] = {5,1,6,4,7,9,8,0,3};
int print(){
int i;
printf("[ ");
for(i=0;i<N;i++)
printf("%d ",a[i]);
printf("]\n");
}
void *qs(void *aptr){
PARM *ap,aleft,aright;
int pivot, pivotIndex, left, right, temp;
int upperbound,lowerbound;
pthread_t me, leftThread, rightThread;
me = pthread_self();
ap = (PARM *)aptr;
upperbound = ap->upperbound;
lowerbound = ap->lowerbound;
pivot = a[upperbound];
left = lowerbound - 1;
right = upperbound;
if(lowerbound >= upperbound)
pthread_exit(NULL);
while(left<right){
do{left++;}while(a[left]<pivot);
do{right--;}while(a[right]>pivot);
if(left<right){
temp=a[left];
a[left]=a[right];
a[right]=temp;
}
}
print();
pivotIndex=left;
temp=a[pivotIndex];
a[pivotIndex]=pivot;
a[upperbound]=temp;
aleft.upperbound=pivotIndex-1;
aleft.lowerbound=lowerbound;
aright.upperbound=upperbound;
aright.lowerbound=pivotIndex+1;
printf("%lu: create left and right threads\n",me);
pthread_create(&leftThread,NULL,qs,(void *)&aleft);
pthread_create(&rightThread,NULL,qs,(void *)&aright);
pthread_join(leftThread,NULL);
pthread_join(rightThread,NULL);
printf("%lu: joined with left & right threads\n",me);
}
int main(int argc,char *argv[]){
PARM arg;
int i, *array;
pthread_t me,thread;
me = pthread_self();
printf("main %lu: unsorted array = ",me);
print();
arg.upperbound = N-1;
arg.lowerbound = 0;
printf("main %lu create a thread to do QS\n",me);
pthread_create(&thread,NULL,qs,(void *)&arg);
pthread_join(thread,NULL);
printf("main %lu sorted array = ",me);
print();
}
4.3.c
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#define N 4
int A[N][N] ,sum[N];
int total = 0;
pthread_mutex_t *m;
void *func(void *arg){
int i,row,sum=0;
pthread_t tid=pthread_self();
row = (int)arg;
printf("Thread %d [%lu] computes sumof row %d\n",row,tid,row);
for (i=0;i<N;i++)
sum +=A[row][i];
printf("Thread %d [%lu] update total with %d : ",row,tid,sum);
pthread_mutex_lock(m);
total+=sum;
pthread_mutex_unlock(m);
printf("total=%d\n",total);
}
int main(int argc,char *argv[]){
pthread_t thread[N];
int i,j,r;
void *status;
printf("Main:initialize A matrix\n");
for (i=0;i<N;i++){
sum[i]=0;
for(j=0;j<N;j++){
A[i][j]=i*N+j+1;
printf("%4d ",A[i][j]);
}
printf("\n");
}
m=(pthread_mutex_t *)malloc(sizeof(pthread_mutex_t));
pthread_mutex_init(m,NULL);
printf("Main: create %d threads\n",N);
for(i=0;i<N;i++){
pthread_create(&thread[i],NULL,func,(void *)i);
}
printf("Main :try to join with threads\n");
for(i=0;i<N;i++){
pthread_join(thread[i],&status);
printf("Main: joined with %d [%lu]: status=%d\n",i,thread[i], (int)status);
}
printf("Main: total = %d\n",total);
pthread_mutex_destroy(m);
pthread_exit(NULL);
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号