

简介遥测自跟踪天线的基本原理
简介遥测自跟踪天线的基本原理
来源 https://mp.weixin.qq.com/s/M1kbYPZavjoe0Th2Xa0Xiw
遥测自跟踪天线能够跟踪目标,是什么原理?不需要目标的位置,怎么做到自跟踪的?
突然一瞬间,有点语塞。
难道要介绍天线、馈源、极化、左旋、右旋、和差网络、耦合器、跟踪接收机,然后再推导一下公式吗?
如果这样的话,客户就崩溃了,我自己也会崩溃。
所以,我就采取了另外一种方式,一种非常不严谨,有很多漏洞的方式做了介绍。
什么是自跟踪天线
在遥测/图传/数据链的地面定向天线有几种跟踪模式?中我们介绍了遥测地面站定向天线的跟踪模式主要有:
程序跟踪、引导跟踪、记忆跟踪、手动跟踪、自跟踪、自动搜索。
其中程序跟踪、引导跟踪、记忆跟踪都依赖于飞行目标的位置、速度信息。地面站根据飞行目标的位置和速度信息计算飞行目标和地面天线的方向矢量,进而计算出地面天线需要转动的方位角和俯仰角,然后通过伺服结构调整天线姿态,使得天线的波束中心对准飞行目标。
而自跟踪模式,是完全依赖对遥测信号的检测,对天线接收的遥测信号进行各种变换,得到方位误差信号和俯仰误差信号。
伺服机构根据方位误差信号调整天线的方位角。
伺服机构根据俯仰误差信号调整天线的俯仰角。
最终使得地面天线波束中心对准飞行目标。
下面这个是遥测平板自跟踪天线的实物图片。
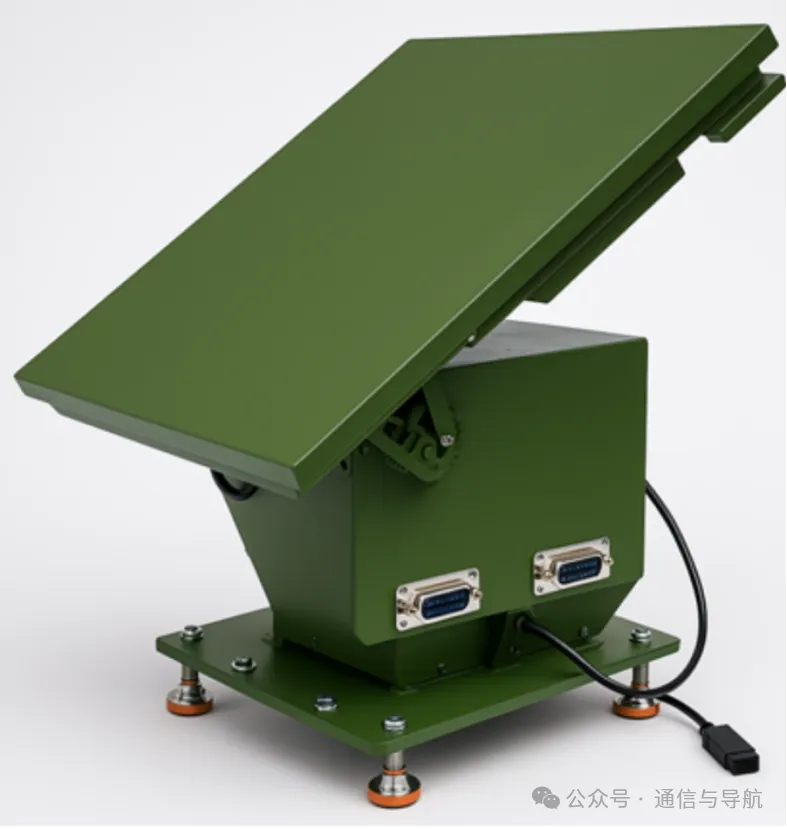
遥测平板自跟踪天线
自跟踪天线的组成
我们对遥测自跟踪天线的组成做最简化的处理,天线系统的组成如下图所示:
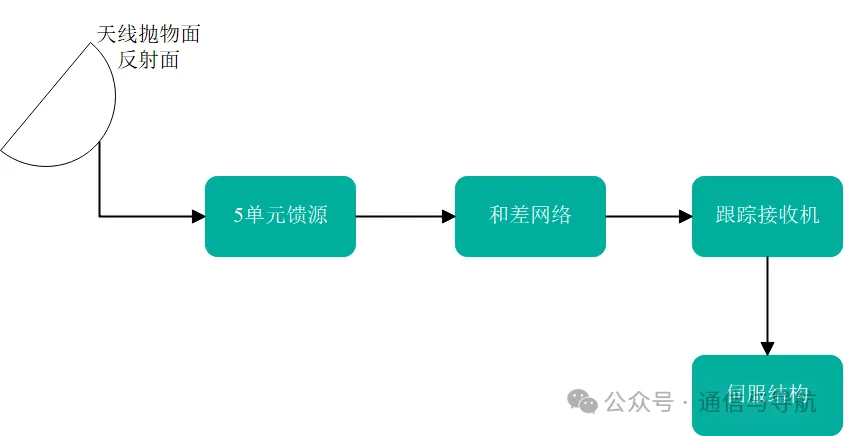
遥测自跟踪天线组成
其中天线抛物面反射面把遥测信号汇集到馈源位置;
遥测天线的馈源是五单元双极化正交结构。馈源三维视图如下图所示。
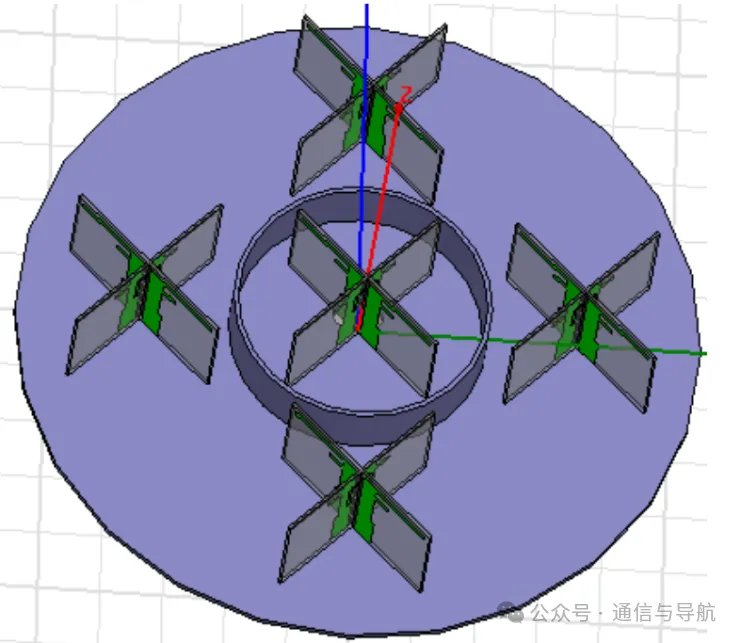
遥测天线馈源
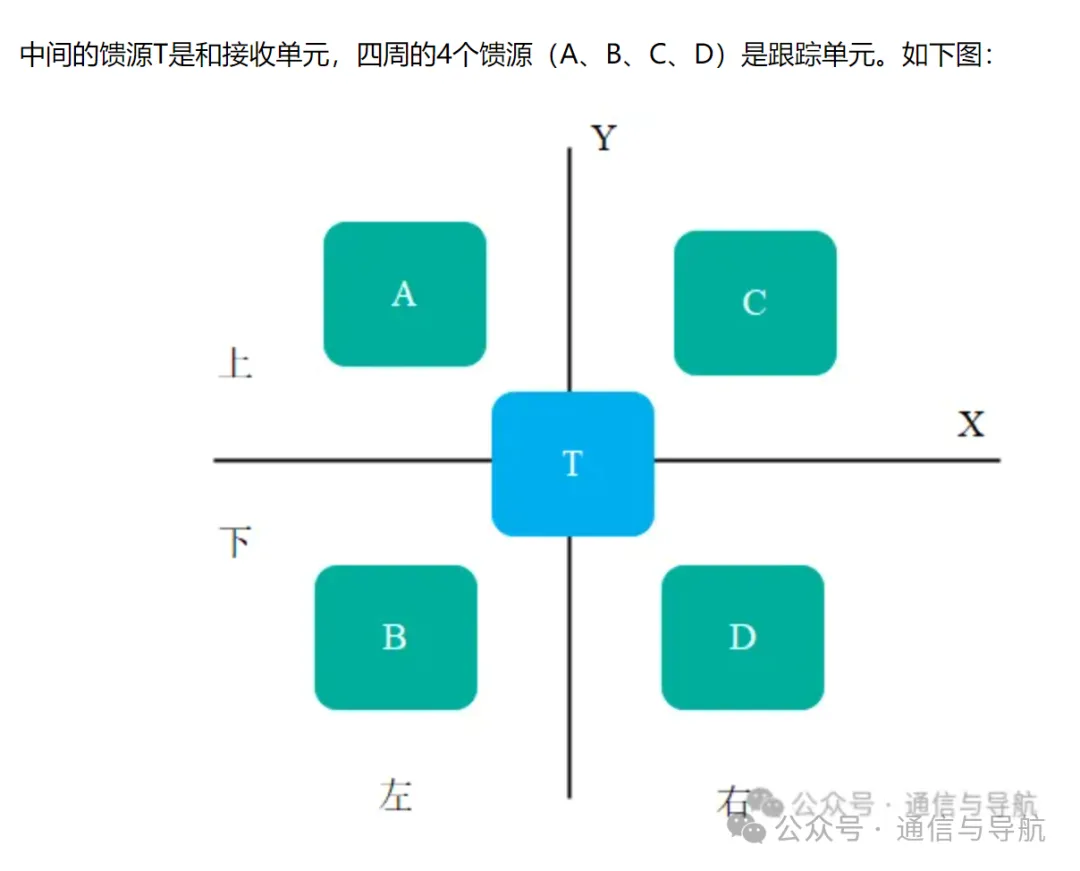
中间的馈源T是和接收单元,四周的4个馈源(A、B、C、D)是跟踪单元。如下图:
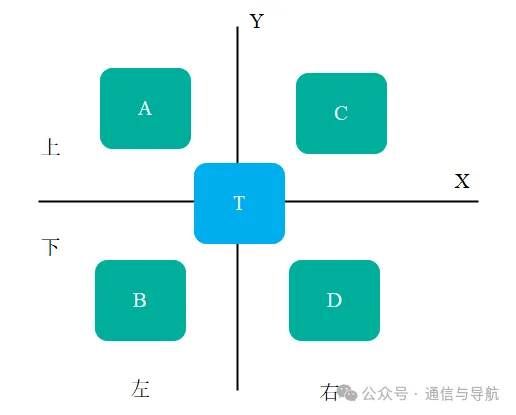
5个馈源
我们假定X代表水平方向,Y代表垂直方向。这4个馈源的输出的4个信号分别为A、B、C、D。
X轴把4个馈源分成2组,A和C位于X轴上方,B和D位于X轴下方;
Y轴把4个馈源分为2组,A和B位于Y轴左侧,C和D位于Y轴右侧;
如果天线在俯仰方向转动,相当于馈源阵列绕着X轴转动;
如果天线在方位方向转动,相当于馈源阵列绕着Y轴转动;
馈源后端的和差网络的结构如下图所示:
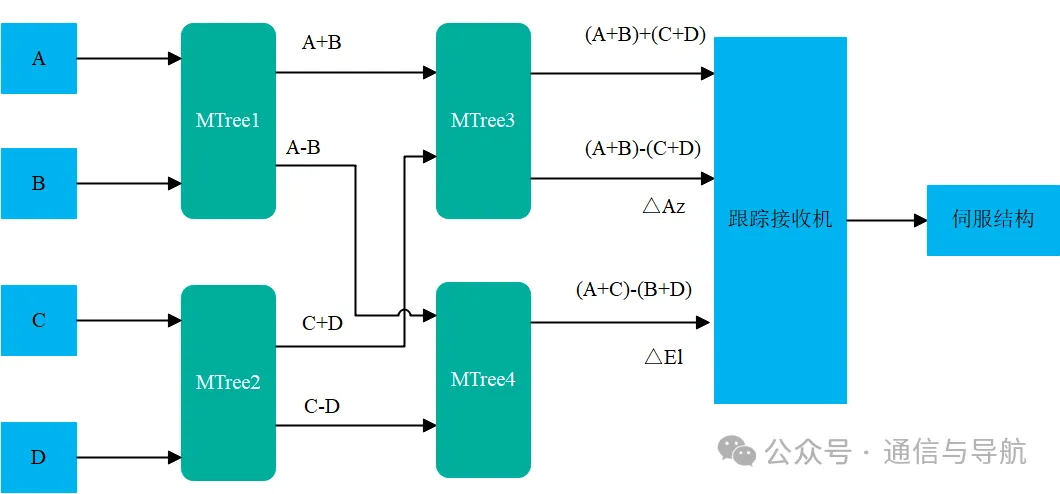
和差网络
图中MTree就是和差网络,对输入的信号分别做加法和减法。
第一个Mtree1的输入是A和B,第二个Mtree2的输入是C和D。
第一个Mtree1的输出是A+B和A-B;
第二个Mtree2的输出是C+D和C-D;
以此类推,
第三个Mtree3的输出有2个,分别是:
和信号:(A+B)+(C+D),称为"和信号"
差信号:(A+B)-(C+D),称为"方位误差信号"
第四个Mtree4的输出是和信号是(A+C)-(B+D),称为"俯仰误差信号"
和差网络产生的3个信号(A+B)+(C+D)、(A+B)-(C+D)和(A+C)-(B+D)输出给跟踪接收机。
跟踪接收机将3个信号转换为伺服机构的控制信号,然后驱动伺服机构转动天线。
基本跟踪原理
当天线的波束中心完全对准飞行目标的时候,5个馈源阵列的中心的T馈源接收的信号最大。同时A、B、C、D这4个馈源接收的信号几乎相等。
此时和信号(A+B)+(C+D)最大,
差信号(A+B)-(C+D)≈0,(A+C)-(B+D)≈0。
如果天线波束中心在俯仰角度上偏离了飞行目标,俯仰误差信号(A+C)-(B+D)不再≈0。
★ 这个(A+C)-(B+D)信号的幅度代表了天线波束中心在俯仰方向上偏离飞行目标的程度(俯仰角偏离了多少度),这个信号的极性(正负号)代表了天线波束中心在俯仰方向上偏离的方向(向上偏离还是向下偏离)。
同理,如果天线波束中心在方位角度上偏离了飞行目标,方位误差信号(A+B)-(C+D)不再≈0,相反,这个(A+B)-(C+D)信号的幅度代表了天线波束中心在方位方向上偏离飞行目标的程度(方位角偏离了多少度),这个信号的极性(正负号)代表了天线波束中心在方位方向上偏离的方向(向左偏离还是向右偏离)。
跟踪接收机的作用就是把方位误差信号(A+B)-(C+D)和俯仰误差信号(A+C)-(B+D) 转换成伺服机构能够识别的电压信号AGC电压,也可以通过串口RS232/RS422输出电压的数值。
该电压的数值和方位误差信号(A+B)-(C+D)、俯仰误差信号(A+C)-(B+D)成线性关系。
当然在实际工程中通常采用归一化处理,也就是用 差信号/和信号 以消除信号强度的影响,如下:
方位误差信号是:
俯仰误差信号是:
★ 伺服机构根据跟踪接收机输出的误差电压,可以转换成俯仰误差角度、方位误差角度,然后驱动电机调整对应的俯仰角和方位角就可以了。
这样也就实现了整个天线自跟踪的过程。
遥测自跟踪天线具体是怎么做自跟踪的?
来源 https://mp.weixin.qq.com/s/JBYIJEydIcbwYEF6rsd_Kw
在 《用比较不严谨的文字介绍遥测自跟踪天线的基本原理》 中,我们介绍了遥测自跟踪天线的基本工作原理。本文将进一步讲解其核心机制——自跟踪模块的工作流程,以及如何通过和差信号实现自动对准目标。
和差信号的生成
遥测自跟踪天线通常采用五单元馈源结构。
四个外围馈源通过射频和差网络组合后,可以生成以下三个关键信号:
- • 和信号 ∑:(A + B) + (C + D)
- • 俯仰方向差信号 Δel:(A + C) - (B + D)
- • 方位方向差信号 Δaz:(A + B) - (C + D)
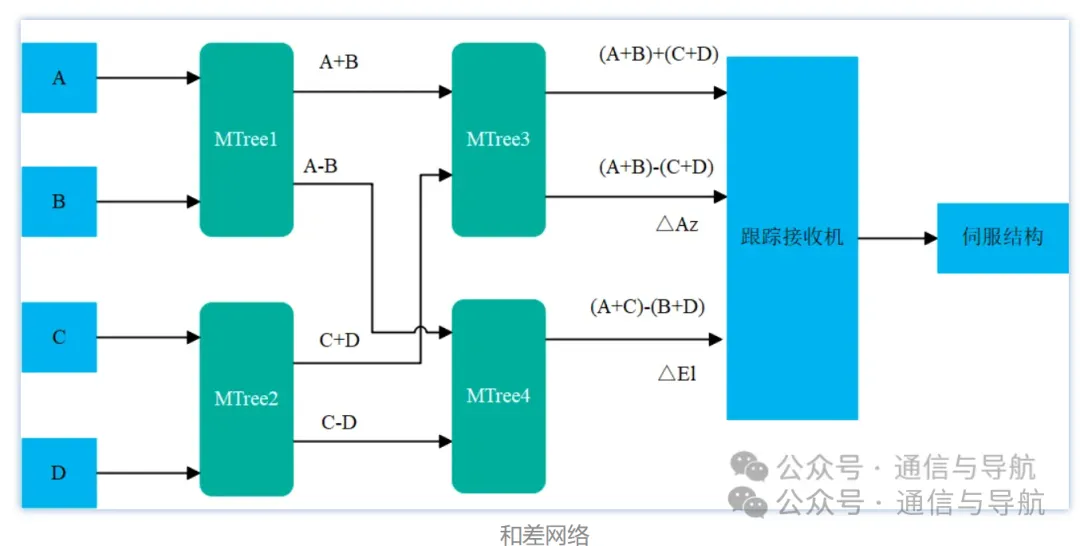
这些信号通过和差网络输出到自跟踪模块,用于检测天线指向的偏差。
差信号的角度误差特性
- • Δel 的幅度 |Δel| 与天线在俯仰方向偏离目标的角度成正比;
- • Δel 的极性 表示天线相对于目标是向上还是向下偏移;
- • Δaz 的幅度 |Δaz| 与天线在方位方向偏离目标的角度成正比;
- • Δaz 的极性 表示天线相对于目标是向左还是向右偏移。
例如,在常见的坐标系约定下,可能有如下对应关系:
- •
- Δaz >0:目标偏右,需向左调整天线;
- Δel <0:目标偏下,需向上调整天线
自跟踪模块将这些误差信号转换为伺服机构能够识别的角度信息,驱动电机调整天线指向。
自跟踪模块的基本组成
自跟踪模块的典型结构如下:
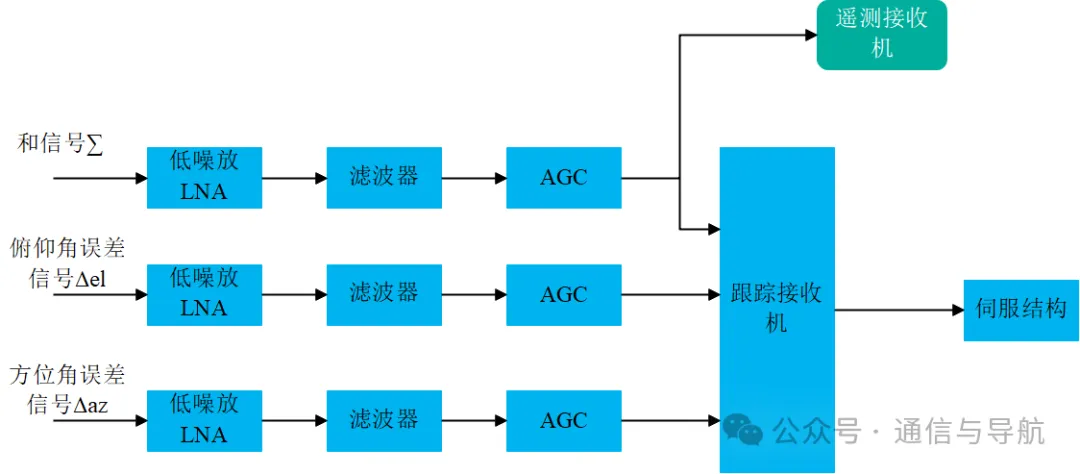
主要组成部分包括:
- • 低噪放 LNA:放大微弱射频信号,同时抑制噪声;
- • 滤波器:滤除带外干扰,提高信噪比;
- • 自动增益控制放大器 AGCA:根据输入信号强度自动调节增益;
- • 跟踪接收机:解调出角度误差信号,并输出给伺服机构;
为了保证角度误差信号不受信号强度波动的影响。差通道(Δel和Δaz)的AGCA增益控制必须与和通道(∑)AGCA保持严格的同步。
通过由和通道(∑)的AGCA产生的增益控制电压(或信号)同时去控制所有三路通道的AGCA放大器。这样,当接收信号强度变化时,三路通道的增益被等比例地调整,从而确保归一化误差信号 Δel/∑ 和 Δaz/∑ 仅反映天线的角度偏差,而不受接收信号强度波动的影响。
和信号∑,俯仰差信号Δel和方位差信号Δaz分别经过低噪放LNA、滤波器、自动增益控制器AGCA,然后进入跟踪接收机。
在跟踪接收机内完成信号的下变频、中频放大、滤波、ADC采样,信号处理、解调、幅度/相位检测、误差计算、角度误差转换等,最后将带有方位教误差、俯仰角度误差信息的数据通过RS422串口发送给伺服机构。
如果采用3个独立通道的话,跟踪接收机通常由射频前端(LNA、混频器、滤波器)、高性能模数转换器(ADC)和FPGA进行数字信号处理共同实现。
其中和信号∑支路输出给遥测接收机,用于后续的遥测信号解调。
归一化处理与角度误差计算
由于和信号 ∑、俯仰差信号 Δel 和方位差信号 Δaz 的数值大小都与接收到的信号强度有关,因此需要对它们进行归一化处理,以消除信号强度变化带来的影响。
归一化公式
- • 归一化方位误差信号:Eaz = Δaz / ∑
- • 归一化俯仰误差信号:Eel = Δel / ∑
归一化后的误差信号 Eaz 和 Eel 是无量纲的,Eaz和Eel的幅度和天线天线指向的实际角度偏差直接相关。而Eaz和Eel的符号,这个符号代表天线需要转动的方向。
归一化角度误差和实际角度误差之间是线性关系,假定天线的误差斜率是Kel和Kaz。Kel和Kaz是由天线馈源的方向图决定的,通过查表或曲线拟合运算可以计算出实际的角度误差。
Φel=Eel/Kel;
Φaz=Eaz/Kaz。跟踪接收机将计算出的角度误差Φel,Φaz输出给伺服结构,完成对天线的闭环控制。
单通道单脉冲跟踪设计
传统的三通道设计虽然精度高,但和信号、俯仰差信号和方位差信号都需要单个独立的射频/中频通道进行传输,每个通道上都需要低噪放LNA、滤波器和AGCA自动增益控制,硬件复杂、成本高。为此,实际应用中常采用单通道单脉冲跟踪结构,以降低系统复杂度。
设计原理
- • 将俯仰差信号 Δel 和方位差信号 Δaz 通过相位切换或幅度调制的方式,周期性地叠加到和信号 ∑ 上;
- • 在单一射频通道中传输复合信号;
- • 跟踪接收机利用与调制频率同步(1KHz)的参考信号进行解调,分离出和信号 ∑、Δel 和 Δaz;
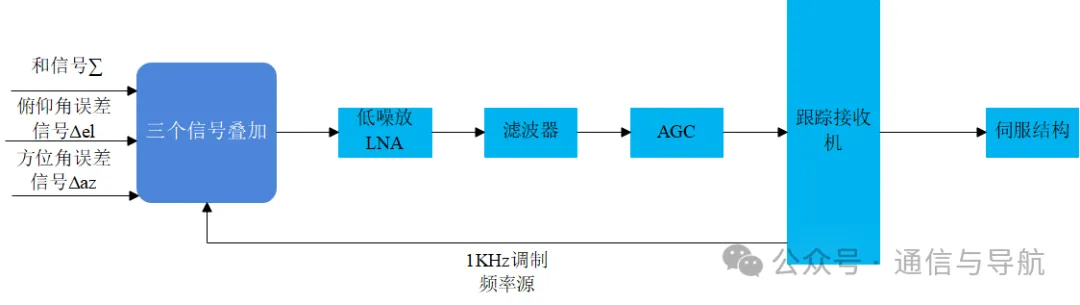
该方法通过巧妙的调制与解调策略,大大简化了射频和中频部分的设计。低噪放、滤波器和AGCA只需要一路就可以。
由于三个误差信息(和信号、方位差、俯仰差)被巧妙地调制并合成到一个单一的射频通道中,跟踪接收机所需的射频和中频硬件复杂度得以大大降低。跟踪接收机中的射频部分和中频部分就可以用集成芯片实现了,比如AD9361。整个跟踪接收机的电路结构也变成了AD9361+FPGA,电路大大简化了。
单通道单脉冲跟踪的方法有点复杂,怎么才能用比较通俗的文字介绍清楚,我还没有想好,如果以后想到了比较好的介绍方法,会再开一篇。
总结
本文详细介绍了遥测自跟踪天线中自跟踪模块的核心功能及其工作原理,重点讲解了和差信号的生成、归一化处理、角度误差计算以及单通道单脉冲跟踪的简化设计思路。
通过这种设计,系统可以在保持较高跟踪精度的同时,显著降低硬件复杂度和成本,广泛应用于卫星通信、雷达、无线测量等领域。
若想深入了解“单通道单脉冲跟踪”的具体实现细节,我们将持续更新相关内容。
=============== End

 浙公网安备 33010602011771号
浙公网安备 33010602011771号