C++11 并发编程基础(一):并发、并行与C++多线程
正文
C++11标准在标准库中为多线程提供了组件,这意味着使用C++编写与平台无关的多线程程序成为可能,而C++程序的可移植性也得到了有力的保证。另外,并发编程可提高应用的性能,这对对性能锱铢必较的C++程序员来说是值得关注的。
1. 何为并发
并发指的是两个或多个独立的活动在同一时段内发生。生活中并发的例子并不少,例如在跑步的时候你可能同时在听音乐;在看电脑显示器的同时你的手指在敲击键盘。这时我们称我们大脑并发地处理这些事件,只不过我们大脑的处理是有次重点的:有时候你会更关注你呼吸的频率,而有时候你更多地被美妙的音乐旋律所吸引。这时我们可以说大脑是一种并发设计的结构。这种次重点在计算机程序设计中,体现为某一个时刻只能处理一个操作。
与并发相近的另一个概念是并行。它们两者存在很大的差别。并行就是同时执行,计算机在同一时刻,在某个时间点上处理两个或以上的操作。判断一个程序是否并行执行,只需要看某个时刻上是否多两个或以上的工作单位在运行。一个程序如果是单线程的,那么它无法并行地运行。利用多线程与多进程可以使得计算机并行地处理程序(当然 ,前提是该计算机有多个处理核心)。
- 并发:同一时间段内可以交替处理多个操作:
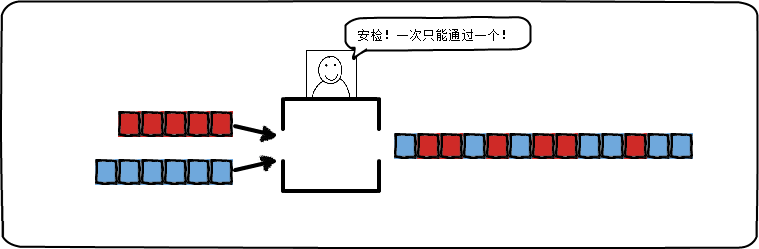
图中整个安检系统是一个并发设计的结构。两个安检队列队首的人竞争这一个安检窗口,两个队列可能约定交替着进行安检,也可能是大家同时竞争安检窗口(通信)。后一种方式可能引起冲突:因为无法同时进行两个安检操作。在逻辑上看来,这个安检窗口是同时处理这两个队列。
- 并行:同一时刻内同时处理多个操作:
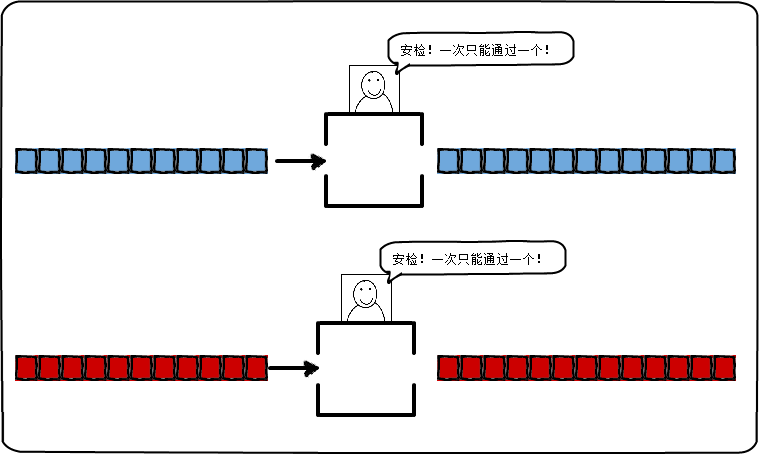
图中整个安检系统是一个并行的系统。在这里,每个队列都有自己的安检窗口,两个队列中间没有竞争关系,队列中的某个排队者只需等待队列前面的人安检完成,然后再轮到自己安检。在物理上,安检窗口同时处理这两个队列。
并发的程序设计,提供了一种方式让我们能够设计出一种方案将问题(非必须地)并行地解决。如果我们将程序的结构设计为可以并发执行的,那么在支持并行的机器上,我们可以将程序并行地执行。因此,并发重点指的是程序的设计结构,而并行指的是程序运行的状态。并发编程,是一种将一个程序分解成小片段独立执行的程序设计方法。
2.并发的基本方式途径
多线程与多进程是并发的两种途径。
想象两个场景:
- 场景一:你和小伙伴要开发一个项目,但小伙伴们放寒假都回家了,你们只能通过QQ聊天、手机通话、发送思维导图等方式来进行交流,总之你们无法很方便地进行沟通。好处是你们各自工作时可以互不打扰。
- 场景二:你和小伙伴放假都呆在学校实验室中开发项目,你们可以聚在一起使用头脑风暴,可以使用白板进行观点的阐述,总之你们沟通变得更方便有效了。有点遗憾的是你在思考时可能有小伙伴过来问你问题,你受到了打扰。
这两个场景描绘了并发的两种基本途径。每个小伙伴代表一个线程,工作地点代表一个处理器。场景一中每个小伙伴是一个单线程的进程,他们拥有独立的处理器,多个进程同时执行;场景二中只有一个处理器,所有小伙伴都是属于同一进程的线程。
2.1 多进程并发
多个进程独立地运行,它们之间通过进程间常规的通信渠道传递讯息(信号,套接字,文件,管道等),这种进程间通信不是设置复杂就是速度慢,这是因为为了避免一个进程去修改另一个进程,操作系统在进程间提供了一定的保护措施,当然,这也使得编写安全的并发代码更容易。
运行多个进程也需要固定的开销:进程的启动时间,进程管理的资源消耗。
2.2 多线程并发
在当个进程中运行多个线程也可以并发。线程就像轻量级的进程,每个线程相互独立运行,但它们共享地址空间,所有线程访问到的大部分数据如指针、对象引用或其他数据可以在线程之间进行传递,它们都可以访问全局变量。进程之间通常共享内存,但这种共享通常难以建立且难以管理,缺少线程间数据的保护。因此,在多线程编程中,我们必须确保每个线程锁访问到的数据是一致的。
3. C++中的并发与多线程
C++标准并没有提供对多进程并发的原生支持,所以C++的多进程并发要靠其他API——这需要依赖相关平台。
C++11 标准提供了一个新的线程库,内容包括了管理线程、保护共享数据、线程间的同步操作、低级原子操作等各种类。标准极大地提高了程序的可移植性,以前的多线程依赖于具体的平台,而现在有了统一的接口进行实现。
C++11 新标准中引入了几个头文件来支持多线程编程:
- < thread > :包含std::thread类以及std::this_thread命名空间。管理线程的函数和类在 中声明.
- < atomic > :包含std::atomic和std::atomic_flag类,以及一套C风格的原子类型和与C兼容的原子操作的函数。
- < mutex > :包含了与互斥量相关的类以及其他类型和函数
- < future > :包含两个Provider类(std::promise和std::package_task)和两个Future类(std::future和std::shared_future)以及相关的类型和函数。
- < condition_variable > :包含与条件变量相关的类,包括std::condition_variable和std::condition_variable_any。
3.1 初试多线程
我们从一个hello开始。在单线程时:
1 # include<iostream> 2 using namespace std; 3 int main() 4 { 5 cout<<"hello world"<<endl; 6 }
在这里,进行由一个线程组成,该线程的初始函数是main。我们启动第二个线程来打印hello world:
1 # include<iostream> 2 # include<thread> 3 using namespace std; 4 void hello() 5 { 6 cout<<"hello world"<<endl; 7 } 8 int main() 9 { 10 thread t (hello); 11 t.join(); 12 }
在这里,我们将打印hello world的语句放在函数hello中。每个线程都必须有一个初始函数,新线程的执行开始于初始函数。对于第一段程序来说,它的初始函数是main,对于我们新创建的线程,可以在std::thread()对象的构造函数中指定。
在第二段程序里,程序由两个线程组成:初始线程始于main,新线程始于hello。这里将新线程t的初始函数指定为hello。
新线程启动之后会与初始进程一并运行,初始线程可以等待或不等待新进程的运行结束——如果需要等待线程,则新线程实例需要使用join(),否则可以使用detach()。如果不等待新线程,则初始线程自顾自地运行到main()结束。
关于< thread > 我们将在下一篇中进行详解。
由于我们的初始线程并没有做什么事情,启动新线程后,新线程将打印出hello world。
这就是我们编写出的第一个多线程的程序,一般来说并不值得为了如此简单的任务而使用多线程,尤其是在这期间初始线程并没做什么。
在下一篇文章里,我们将继续探索< thread >头文件的内容,编写更复杂的并发程序。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号