

chns方程初了解(形式,求解内容,方式)
目录
不可压缩流 vs. 可压缩流
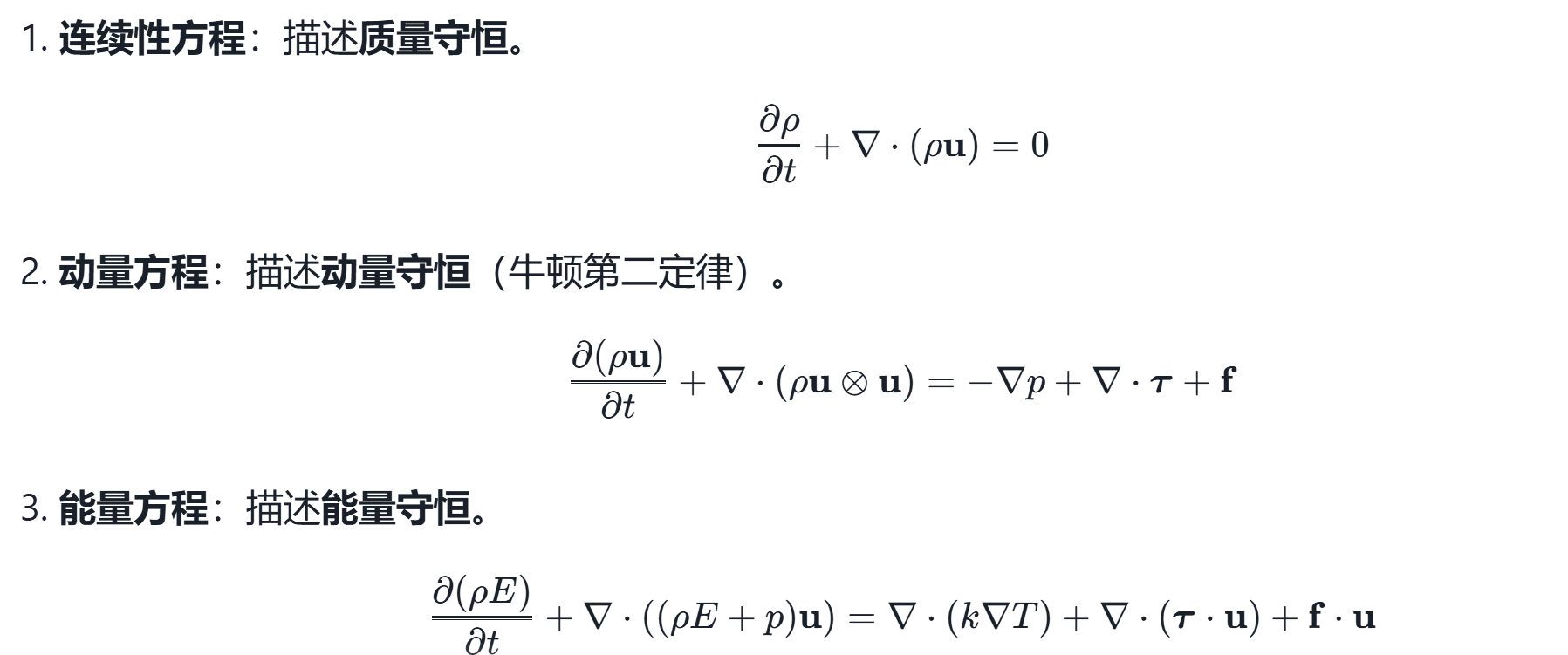
1. 核心物理区别
| 特性 | 不可压缩流 | 可压缩流 |
|---|---|---|
| 密度 (ρ) | 常数(ρ = const) | 变量(ρ = ρ(x, y, z, t)),随压力和温度变化 |
| 马赫数 | Ma < 0.3 (约300 m/s以下,如水、低速空气) | Ma > 0.3 (如高速飞行、爆炸、内燃机) |
| 能量方程 | 通常解耦,可先求解连续性+动量方程 | 强耦合,必须联立求解能量方程 |
| 物理现象 | 无激波、声波传播不是主要关注点 | 可能出现激波、膨胀波等复杂现象 |
2. ns方程形式
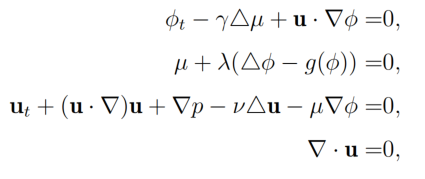
CHNS方程形式
方程逐个对比分析
1. 第一个方程:演化方程
第一组 (1.1a):φ_t - γΔμ + u·∇φ = 0
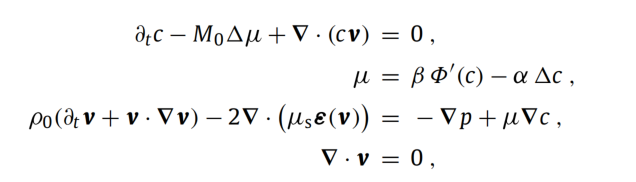
第二组:∂_t c - M₀Δμ + ∇·(cv) = 0
差异原因:
- 变量不同:
φ(相场)vsc(溶质浓度) - 对流项形式不同:
u·∇φ:相场被流体被动输运∇·(cv):溶质守恒输运(散度形式保证质量守恒)
- 物理意义:相场描述界面位置,浓度描述物质分布
2. 第二个方程:化学势定义
第一组 (1.1b):μ + λ(Δφ - g(φ)) = 0
第二组:μ = βΦ'(c) - αΔc
差异原因:
- 非线性程度不同:
g(φ):强非线性(如双阱势φ³-φ)Φ'(c):弱非线性(如二次函数)
- 梯度项系数不同:
λΔφ:界面能项(抑制界面过薄)αΔc:扩散项(溶质的空间分布效应)
- 自由能泛函不同:相场用双阱势,溶质用混合自由能
3. 第三个方程:动量方程
第一组 (1.1c):u_t + (u·∇)u + ∇p - νΔu - μ∇φ = 0
第二组:ρ₀(∂_t v + v·∇v) - 2∇·(μₛε(v)) = -∇p + μ∇c
差异原因:
- 密度处理不同:
- 第一组:隐含
ρ=1(无量纲化) - 第二组:显式
ρ₀(有量纲密度)
- 第一组:隐含
- 粘性项形式不同:
νΔu:牛顿流体粘性(拉普拉斯形式)2∇·(μₛε(v)):一般流体粘性(应变率张量形式)
- 驱动力不同:
μ∇φ:表面张力驱动(界面力)μ∇c:浓度梯度驱动(溶质浮力)
4. 第四个方程:连续性方程
第一组 (1.1d):∇·u = 0
第二组:∇·v = 0
差异原因:
- 形式相同:都表示不可压缩条件
- 变量符号不同:
uvsv(仅仅是符号选择)
形式差异的根本原因
1. 物理系统不同
复制
第一组:相分离系统
- 核心:界面演化
- 驱动力:表面张力最小化
第二组:溶质输运系统
- 核心:物质输运
- 驱动力:化学势梯度最小化![]()
引用
2. 数学建模策略不同
| 方面 | 第一组 | 第二组 |
|---|---|---|
| 变量选择 | 相场φ | 浓度c |
| 自由能 | 双阱势 | 混合自由能 |
| 守恒律 | 界面守恒 | 质量守恒 |
| 耦合机制 | 界面-流体耦合 | 溶质-流体耦合 |
3. 数值处理需求不同
第一组需要处理:
- 界面锐化(保持界面厚度)
- 表面张力计算(曲率相关)
第二组需要处理:
- 浓度边界层
- 溶质守恒性
对研究的启示
- 方法选择:根据具体问题选择合适的CHNS形式
- 数值挑战:
- 相场CHNS:界面捕捉
- 溶质CHNS:浓度边界层处理
- 物理理解:不同形式反映不同的物理机制
此种形式差异体现了CHNS方程的灵活性和适应性——它可以根据具体物理问题调整数学形式,但保持核心的耦合思想。
CHNS求解多少个变量
最少需要求解 3 个核心变量,但完整的物理描述通常涉及5-7 个变量。
变量分层解析
第一层:核心求解变量(3个)
这些是必须通过求解PDE得到的未知函数:
| 变量 | 符号 | 物理意义 | 方程类型 |
|---|---|---|---|
| 相场 | ϕϕ | 相分布(0=流体A, 1=流体B) | Cahn-Hilliard方程 |
| 速度 | u=(ux,uy,uz)u=(ux,uy,uz) | 流体速度场 | Navier-Stokes方程 |
| 压力 | pp | 压力场 | 连续性方程约束 |
注意:uu 是向量,在三维空间中涵盖3个分量,但通常被视为一个向量变量。
第二层:辅助变量(2个)
这些变量通常通过代数关系从核心变量导出,不直接求解PDE:
| 变量 | 符号 | 物理意义 | 定义方式 |
|---|---|---|---|
| 化学势 | μμ | 相变驱动力 | μ=−λ(Δϕ−g(ϕ))μ=−λ(Δϕ−g(ϕ)) |
| 自由能密度 | F(ϕ)F(ϕ) | 热力学势 | F(ϕ)=14ε2(1−ϕ2)2F(ϕ)=4ε21(1−ϕ2)2 |
第三层:物理参数(常量或已知函数)
这些是模型的输入参数,不是求解变量:
| 参数 | 符号 | 典型值/范围 | 物理意义 |
|---|---|---|---|
| 界面厚度 | εε | 10−8∼10−610−8∼10−6m | 界面扩散尺度 |
| 混合能密度 | λλ | 材料相关 | 界面张力系数 |
| 运动粘度 | νν | 10−6∼10−310−6∼10−3m²/s | 流体粘性 |
| 迁移率 | γγ | 10−12∼10−910−12∼10−9 | 相变动力学 |
| 密度 | ρρ | 103103 kg/m³ | 流体密度 |
CHNS方程数值手段全景图
我们可以将这些方法从三个维度进行分类:
- 时间离散策略(如何推进时间)
- 空间离散策略(如何处理空间)
- 体系耦合策略(如何处理变量间的耦合关系)
一、时间离散策略
这是决定格式精度和稳定性的核心。
1. 一阶格式
- Euler 隐格式:
- 描述:最简单、最基础的隐式手段。
- 公式:un+1−unΔt=f(un+1)Δtun+1−un=f(un+1)
- 特点:无条件稳定(线性问题),但精度较低(O(Δt)O(Δt))。
- 文献中出现:Feng [29], Diegel et al. [22]
2. 二阶格式
- 时间二阶格式:
- 描述精度与效率的平衡点。就是:精度更高(O(Δt2)O(Δt2)),
- 常见实现:Crank-Nicolson, BDF2等。
- 特点:计算成本适中,稳定性好,是工业和学术研究的主流选择。
- 文献中出现:Han & Wang [41], Diegel et al. [23]
二、空间离散策略
这首要指有限元方法中的具体技术。
1. 混合有限元方法
- 描述:使用多个不同的有限元空间来求解耦合问题。
- 核心应用:处理Navier-Stokes方程中的速度-压力耦合。
- 原因:速度和压力的有限元空间需要满足特定的inf-sup条件(或LBB条件),以避免数值不稳定(如压力振荡)。
- 文献中出现:几乎所有文献都隐含或明确采用了该手段,如Feng [29], Diegel et al. [22, 23]。
2. 稳定化方法
- 描述:依据添加小的稳定项,使得inf-sup条件不再被严格要求,允许使用更简单的、等阶的速度-压力有限元空间。
- 优点:增加了有限元空间选择的灵活性,简化了程序实现。
- 文献中出现:Shen & Yang [69, 70], Cai & Shen [14], Chen et al. [18]。
三、系统耦合策略
这是处理CHNS强非线性和复杂耦合的关键,也是算法创新最活跃的领域。
1. 全耦合格式
- 描述:将相场、化学势、速度、压力等所有变量放在一个大的非线性框架中,同时求解。
- 优点:物理上最忠实于原方程,耦合紧密。
- 缺点:系统规模巨大,求解困难,计算成本极高。
- 文献中出现:Grün [36], Shen & Yang [69]。
2. 解耦格式
研究的重点和难点,旨在将大系统拆分为若干个小环境,提高计算效率。就是这
a) 弱耦合格式
- 描述:系统被拆分,但各子系统的求解仍需在单个时间步内进行迭代,直至收敛。
- 特点:介于全耦合和完全解耦之间,计算量和耦合度居中。
- 文献中出现:Cai & Shen [14]。
b) 完全解耦格式
- 描述:将大体系拆分为多个独立的子系统,每个子系统可以顺序、独立地求解,无需迭代。
- 优点:计算效率最高,易于并行化。
- 缺点:设计难度大,需要巧妙地处理耦合项以保证稳定性和精度。
- 文献中出现:Shen & Yang [70], Xu et al. [76], Chen et al. [18]。
️ 四、核心构造手艺
为了达成上述的解耦和稳定性,研究者们发明了一些巧妙的技术。
1. 凸分裂方法
- 描述:将自由能泛函 F(ϕ)F(ϕ) 人为地分裂成一个凸的部分 Fc(ϕ)Fc(ϕ) 和一个凹的部分 Fe(ϕ)Fe(ϕ),即 F(ϕ)=Fc(ϕ)+Fe(ϕ)F(ϕ)=Fc(ϕ)+Fe(ϕ)。
- 作用:对凸部分进行隐式处理,对凹部分进行显式处理,从而既能保证能量稳定性,又能避免完全隐式的非线性求解。
- 文献中出现:Shen & Yang [70], Han & Wang [41], Diegel et al. [22]。
2. 压力投影法
- 描述:一种经典的处理不可压缩流的方法,将速度和压力的求解分离开。
- 步骤:
- 先求解一个不含压力梯度的“中间速度”。
- 再依据求解一个压力泊松方程来修正中间速度,使其满足不可压缩条件。
- 优点:避免了直接求解速度-压力的鞍点问题。
- 文献中出现:Han & Wang [41], Chen et al. [18]。
五、分析目标
文献中反复提到的研究目标,反映了该领域的关注重点。
1. 能量稳定性
- 目标:证明数值格式的离散能量随时间单调不增,即 En+1≤EnEn+1≤En。
- 类型:
- 条件稳定:对时间步长 ΔtΔt 有要求。
- 无条件稳定:对 ΔtΔt 没有限制。
- 文献中出现:几乎所有文献都提到了这一点。
2. 误差估计
- 目标:从数学上严格证明数值解与精确解之间的误差,给出收敛阶。
- 难点:CHNS的强非线性和复杂耦合使得误差分析非常困难。
- 类型:
- 半离散误差估计:只分析空间离散误差。
- 全离散误差估计:同时分析空间和时间离散误差(更难,成果更少)。
- 文献中出现:Feng [29], Diegel et al. [22, 23], Cai & Shen [14], Xu et al. [76], Chen et al. [18]。
总结表格
| 方法类别 | 具体方法 | 主要特点 | 代表文献 |
|---|---|---|---|
| 时间离散 | Euler隐格式 | 一阶,无条件稳定 | Feng [29], Diegel [22] |
| 时间二阶格式 | 二阶,精度与效率平衡 | Han & Wang [41], Diegel [23] | |
| 空间离散 | 混合有限元 | 处理速度-压力耦合 | 几乎所有 |
| 稳定化方法 | 放宽inf-sup条件 | Shen & Yang [70], Cai & Shen [14] | |
| 系统耦合 | 全耦合 | 精确,计算昂贵 | Grün [36] |
| 弱耦合 | 迭代求解,折中方案 | Cai & Shen [14] | |
| 完全解耦 | 高效,线性求解 | Shen & Yang [70], Xu [76] | |
| 构造技术 | 凸分裂 | 保证能量稳定性的关键 | Shen & Yang [70], Han & Wang [41] |
| 压力投影法 | 分离速度和压力 | Han & Wang [41], Chen [18] | |
| 分析目标 | 能量稳定性 | 保证物理合理性 | 几乎所有 |
| 误差估计 | 验证数学收敛性 | Feng [29], Diegel [23] |
这段综述清晰地展示了CHNS数值方法从“能算”(建立格式、证明稳定)到“算好”(解耦、线性化、高效)再到“算准”(严格的误差分析)的发展历程。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号