


Cooperative ISAC: An End-to-End Perspective - 教程
摘要集成感知与通信(Integrated Sensing and Communication, ISAC)自被确定为第六代(6G)移动通信的关键应用场景以来,引起了广泛关注。而协作式 ISAC 凭借大规模蜂窝基础设施的优势,以及无需全双工收发器的特性,受到移动运营商的青睐。
本文开始从链路层面出发,介绍了协作式 ISAC 环境的信道建模与关键技术,包括同步、波束管理以及先进感知算法。
从网络视角出发,文章探讨了优化的基站(BS)部署、接收节点选择以及网络干扰管理策略,以提升系统性能。
随后,引入了由新型多输入多输出(Multiple-Input Multiple-Output, MIMO)天线技术增强的协作式 ISAC。最终,分别展示了在 Sub-7 GHz 和毫米波频段下协作式 ISAC 系统的原型设计。户外环境下的实验结果验证了:仅需占用 3.5% 的通信容量和 200 MHz 带宽,即可在 500 米范围内实现 0.2 米的距离估计精度。
索引术语协作式,集成感知与通信(ISAC),多输入多输出(MIMO),原型。
文章目录
Beam Management
在实际场景中,当缺乏目标方向的先验知识时,需要进行波束扫描。波束成形器具有高方向性,意味着每个波束的空间覆盖范围较窄,要实现完整的空间覆盖需启用大量波束。每个波束都需专用的参考信号资源和测量上报(例如,接收信号参考功率(RSRP)/信干噪比(SINR)),从而带来显著的资源和信令开销。而波束密度不足则可能导致无法对准目标,造成反射信号弱、感知精度下降。此种权衡促使我们寻求优化的波束配置策略。
为了平衡开销与性能,大家采用一种包含波束过采样的两阶段波束管理方案。该方案在第一阶段确定粗略的目标范围,在第二阶段确定精细的波束方向。
- Phase 1—Coarse Detection
a) 节点 A 通过不同的模拟波束发送信号。
b) 节点 B 测量不同波束下的 RSRP/SINR,并报告给节点 A。
c) 节点 A 识别满足以下条件的相邻波束:
∣ R S R P i − R S R P j ∣ < T 且 arg max k ( R S R P k ) ∈ { i , j } , (15) | \mathrm{RSRP}_i - \mathrm{RSRP}_j | < T \quad \text{且} \quad \arg\max_k (\mathrm{RSRP}_k) \in \{i, j\}, \tag{15}∣RSRPi−RSRPj∣<T且argkmax(RSRPk)∈{i,j},(15)
其中 T TT是预设阈值,i ii、j jj表示相邻波束索引。若条件满足,则进入 Phase 2;否则,节点 A 选择节点 B 报告的 RSRP/SINR 值最大的波束。
- Phase 2—Refined Beamforming
- a) 节点 A 在合格的相邻波束(oversampled beams)之间生成过采样波束。
- b) 节点 B 评估并报告最优的过采样波束索引。
波束管理的一个重要方面是过采样波束的生成(generation of oversampled beams)。过采样波束的生成过程如下所述。假设最强的两个波束在水平方向上相邻,如图 2 中蓝色圆圈所示,对应波束索引( k , l ) (k,l)(k,l) 和 ( k , l + 1 ) (k,l+1)(k,l+1)。
对于波束 ( k , l ) (k,l)(k,l),天线单元的垂直和水平相位分别为ϕ v , k = 2 π k ⋅ m / M \phi_{v,k} = 2\pi k \cdot m/Mϕv,k=2πk⋅m/M 和 ϕ h , l = 2 π l ⋅ n / N \phi_{h,l} = 2\pi l \cdot n/Nϕh,l=2πl⋅n/N。
类似地,对于波束( k , l + 1 ) (k,l+1)(k,l+1),天线单元的垂直和水平相位分别为ϕ v , k = 2 π k ⋅ m / M \phi_{v,k} = 2\pi k \cdot m/Mϕv,k=2πk⋅m/M 和 ϕ h , l + 1 = 2 π ( l + 1 ) ⋅ n / N \phi_{h,l+1} = 2\pi (l+1) \cdot n/Nϕh,l+1=2π(l+1)⋅n/N。
这里,利用增加过采样因子O v O_vOv 和 O h O_hOh来细化波束方向。例如,如果垂直和水平方向均被细化为两倍的波束数量,则对应的过采样因子O v O_vOv 和 O h O_hOh均为 2。在这种情况下,原始波束( k , l ) (k,l)(k,l)对应的垂直和水平相位分别为2 ϕ v , k / O v 2\phi_{v,k}/O_v2ϕv,k/Ov 和 2 ϕ h , l / O h 2\phi_{h,l}/O_h2ϕh,l/Oh,而原始波束( k , l + 1 ) (k,l+1)(k,l+1)对应的垂直和水平相位分别为2 ϕ v , k / O v 2\phi_{v,k}/O_v2ϕv,k/Ov 和 2 ϕ h , l + 1 / O h 2\phi_{h,l+1}/O_h2ϕh,l+1/Oh。
其余七个波束(绿色圆圈)的垂直和水平相位分别为2 π a ⋅ m / ( M ⋅ O v ) 2\pi a \cdot m / (M \cdot O_v)2πa⋅m/(M⋅Ov) 和 2 π b ⋅ n / ( N ⋅ O h ) 2\pi b \cdot n / (N \cdot O_h)2πb⋅n/(N⋅Oh),其中 ( a , b ) (a,b)(a,b) 的组合值为 ( 2 k − 1 , 2 l ) (2k-1,2l)(2k−1,2l)、( 2 k − 1 , 2 l + 1 ) (2k-1,2l+1)(2k−1,2l+1)、( 2 k − 1 , 2 l + 2 ) (2k-1,2l+2)(2k−1,2l+2)、( 2 k , 2 l + 1 ) (2k,2l+1)(2k,2l+1)、( 2 k + 1 , 2 l ) (2k+1,2l)(2k+1,2l)、( 2 k + 1 , 2 l + 1 ) (2k+1,2l+1)(2k+1,2l+1) 和 ( 2 k + 1 , 2 l + 2 ) (2k+1,2l+2)(2k+1,2l+2)。生成的垂直和水平预编码矩阵如下:
W v = [ 1 , e j 2 π a / ( M ⋅ O v ) , ⋯ , e j 2 π a ( M − 1 ) / ( M ⋅ O v ) ] (16) \mathbf{W}_v = \left[1,\ e^{j2\pi a/(M\cdot O_v)},\ \cdots,\ e^{j2\pi a(M-1)/(M\cdot O_v)}\right] \tag{16}Wv=[1,ej2πa/(M⋅Ov),⋯,ej2πa(M−1)/(M⋅Ov)](16)
W h = [ 1 , e j 2 π b / ( N ⋅ O h ) , ⋯ , e j 2 π b ( N − 1 ) / ( N ⋅ O h ) ] (17) \mathbf{W}_h = \left[1,\ e^{j2\pi b/(N\cdot O_h)},\ \cdots,\ e^{j2\pi b(N-1)/(N\cdot O_h)}\right] \tag{17}Wh=[1,ej2πb/(N⋅Oh),⋯,ej2πb(N−1)/(N⋅Oh)](17)
最终合成的预编码矩阵如下:
W = [ W h , e j 2 π a / ( M ⋅ O v ) W h , ⋯ , W h e j 2 π a ( M − 1 ) / ( M ⋅ O v ) ] (18) \mathbf{W} = \left[\mathbf{W}_h,\ e^{j2\pi a/(M\cdot O_v)}\mathbf{W}_h,\ \cdots,\ \mathbf{W}_h e^{j2\pi a(M-1)/(M\cdot O_v)}\right] \tag{18}W=[Wh,ej2πa/(M⋅Ov)Wh,⋯,Whej2πa(M−1)/(M⋅Ov)](18)
多目标感知可借助时分(time division)或多个面板(multipanel)搭建(每个面板生成一个波束)。此外,若两个目标彼此靠近且由一个模拟波束服务,则在混合波束成形结构下,也可生成具有更精细波束的不同数字预编码器,从而在空间维度上区分不同目标。
AI Sensing Algorithm
在三维场景中,常常存在多个散射中心。这些散射相互作用使得电磁(EM)逆问题高度非线性且严重不适定,导致传统人工智能模型无法有效捕捉电磁属性的完整空间变化 [28]。就是前几节已探讨了在视距(LOS)或稀疏多径条件下感知算法和波束管理策略。然而,对于现实且艰难的目标,独特
传统的AI模型,如卷积神经网络(CNNs)[29]、循环神经网络(RNNs)以及基于标准Transformer的架构 [30],在应用于高维逆散射问题时通常表现出有限的泛化能力。即使使用大规模训练数据集,这些模型也通常作为黑箱回归器进行训练,而没有显式地融入电磁传播的基本物理原理 [31], [32], [33], [34]。因此,它们对噪声高度敏感,对未知几何结构的鲁棒性较差,并且在推理过程中计算成本过高 [35], [36]。
在多重散射条件下。就是相比之下,模型辅助或物理信息神经网络(model-assisted or physics-informed neural networks,PINNs)[35] 已被提出,用于将物理约束集成到神经网络架构中。尽管这些技巧展现出潜力,但它们往往难以捕捉逆电磁问题中固有的多模态后验分布,尤其
为克服这些局限性,大家提出使用扩散模型,这是一种生成模型,旨在借助序列去噪过程学习复杂数据的后验分布(posterior distribution of complex data) [37]。近期研究 [38], [39] 表明,扩散模型在测量噪声下具有更强的鲁棒性,能更好捕捉逆预测中的不确定性,并且即使在低素材条件下也能提供具有竞争力的性能。这些特性对于电磁属性感知尤为有利,因为在从背向散射场观测到介电常数剖面的逆映射过程中,系统是病态的且对扰动敏感。
本工作中选择扩散模型的关键动机总结如下:
- 对噪声的鲁棒性:扩散模型通过迭代去噪实现重建,因此在低信噪比(SNR)条件下仍能给予稳定的重构结果。
- 概率推理能力:与确定性人工智能模型不同,扩散模型从学习到的概率分布中采样,从而产生更可靠的结果,并可量化不确定性。
- 跨场景泛化能力:训练好的扩散模型能够更好地推广到未见过的目标配置和测量域中。
PROTOTYPE DESIGN AND EXPERIMENTAL RESULTS
在本节中,我们展示了三种原型设计,用于实验性地验证我们 ISAC 框架的关键理论。
毫米波原型展示了同步误差抑制方法,通过我们的参考路径同步方法实现了亚米级精度。
sub-7 GHz 原型利用现有的 5G 基础设施验证了多节点协作式 ISAC 的构建,
而伪 MIMO 原型则在与具有相似硬件成本的混合 MIMO 相比的情况下,验证了更高的感知精度。
Prototype at Millimeter Wave Band
毫米波频段的 ISAC 原型设计用于利用一系列操作处理接收到的 OFDM 信号,包括信号采样、解调和数字信号处理。高速模数转换器(ADCs)捕获入射的毫米波信号,确保对接收的 OFDM 波形进行准确采样。采样信号经过快速傅里叶变换(FFT),以提取频域子载波。应用信道估计和均衡技术以完成鲁棒的信号恢复,随后进行数字信号处理(DSP)操作,以高精度估计目标参数。
该原型的中心频率为 26 GHz。感知带宽和通信带宽均为 200 MHz。系统配备一个 16×16 的天线阵列,共 256 根天线,等效全向辐射功率(EIRP)为 58 dBm。感知和通信均采用 OFDM 波形。对于 6G 帧结构,感知符号可在时间时隙中的任意位置配置,感知与通信功能采用时分方案,感知资源分配比为1 / 28 1/281/28。
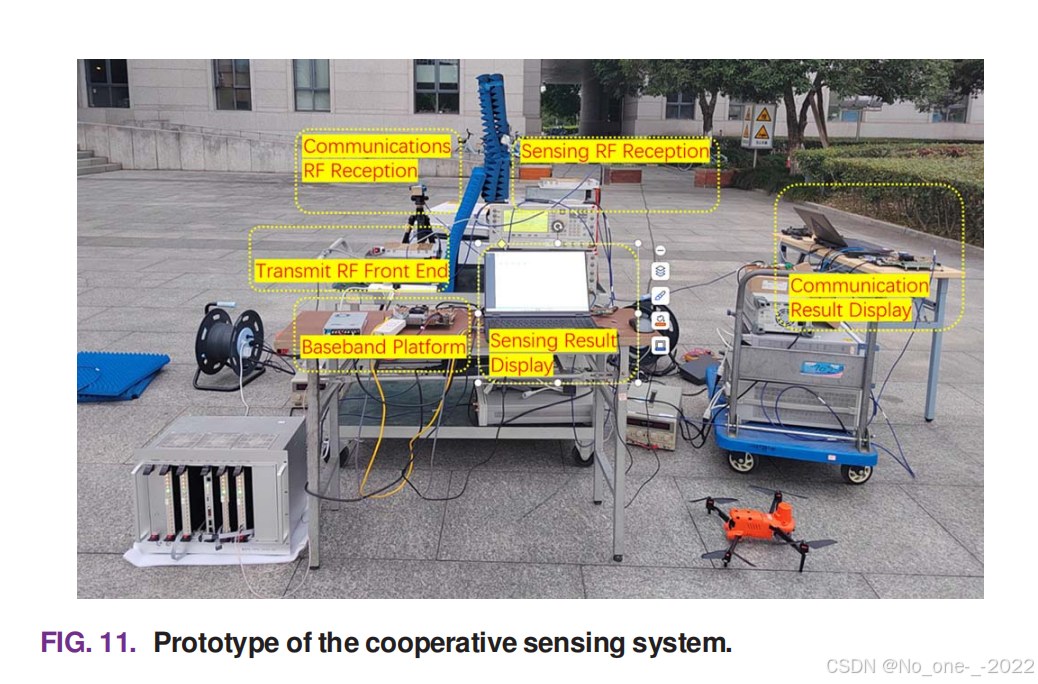
在实验中,两个基站通过光纤连接(fiber connection)建立同步。协作式感知系统的架构级测试床架构如图 11 所示。该系统的硬件由射频前端和基带板组成,用于生成和处理反射信号。经过信号处理后,可获得无人机(UAV)的距离、角度和速度信息。
在实地实验中,无人机路径的传播距离约为 500 m。测试场景如图 12(a) 所示。目标位于发射机正上方,高度为 500 m。所获得的距离估计结果的示例测量结果如图 12(b) 所示,其中显示了对无人机高度的估计值。通过多次试验,我们实现了亚米级的距离估计精度,验证了所提出原型的有效性 [11]。
Synchronization Method Trial
同步方案验证装置如图 13 所示。该原型包括发射机、接收机、UE 和处理单元。在实验中,两个基站通过“同步”部分所述的参考路径同步办法进行同步,目标感知则通过“同步”部分中的 DFT 处理实现。通过发送通信参考信号,接收机捕获由目标反射的回波信号,其处理单元应用“同步”部分所述的技术达成同步。与此同时,UE 接收通信信号并测量传输速率。

为了评估同步技巧的性能,实验在 4 到 6 m 的测试范围内进行。目标将被放置在此范围内,以评估同步精度和距离估计性能。发射机与接收机之间的同步通过光纤直连和空中接口两种方式实现,分别用于校准和评估。同步完成后,将测量目标的距离,并分析估计误差。实验结果表明,在空中接口同步情况下,距离估计精度为 0.2 m;在直接光纤连接情况下,精度为 0.16 m。
通信性能也进行了测试。一个角形天线作为用户设备(UE),用于接收和处理通信信号。体系采用 16-正交幅度调制(QAM)传输数据流,在无导频信号开销的情况下,实现了约 683.78 Mbps 的传输速率。
此外,基于该同步方案的协作感知预商用产品(precommercial products)已研发完成。在多个城市的 4.9 GHz 频段试验中,系统展示了 10 m 的定位精度,角度估计误差为1 ∘ 1^\circ1∘。
Preliminary Prototype at Sub-7 GHz Band
Hardware and Deployment
此外,基于现有的 5G 网络基础设施,开发了一个 sub-7 GHz 原型,旨在利用多节点协作式 ISAC 体系。该原型由多个在 sub-7 GHz 频段运行的有源天线单元(AAUs)组成,每个 AAU 调整为双极化均匀平面阵列(dual-polarized uniform planar array,UPA)。UPA 元素在方位角和俯仰维度上均进行了排列,从而支持灵活的波束成形,以提升感知和通信性能。
对于 UPA 配置,方位角方向上的元素数量等同于射频链的数量,而在俯仰方向上,多个天线元件共享一个射频链。部署场景包括多个基站作为发射和接收节点,形成协作式感知网络。
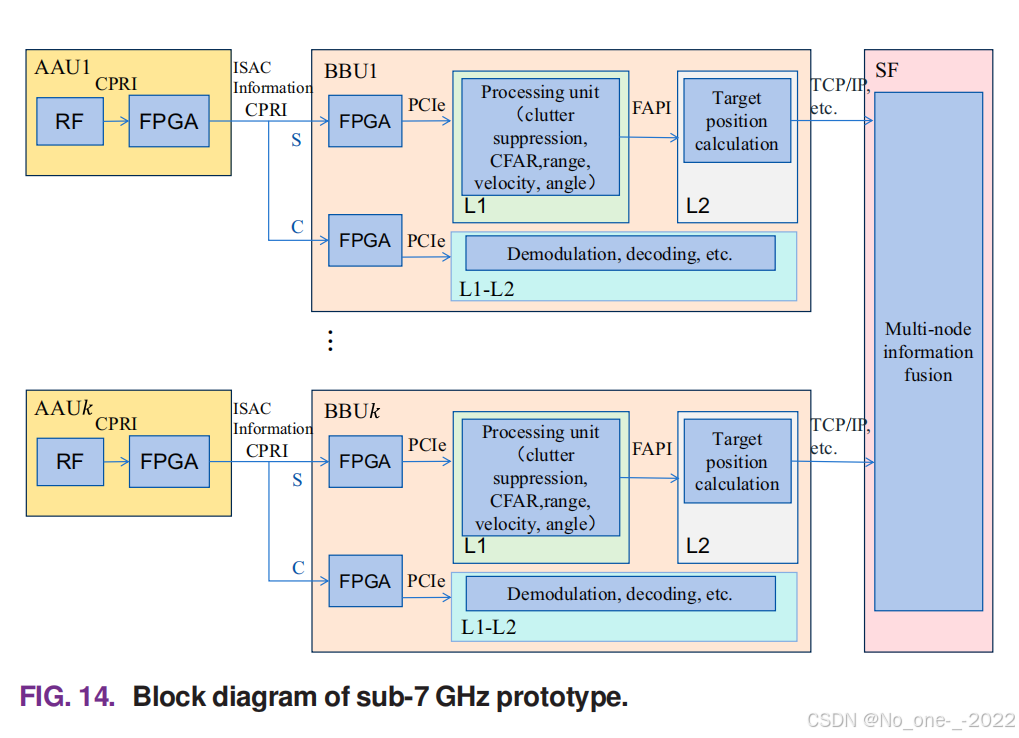
sub-7 GHz 原型接收节点(receiving node for sensing)的框图如图 14 所示。该 sub-7 GHz 原型主要由一个 AAU、一个建筑基带单元(BBU)和一个感知功能(SF)组件构成。AAU 包括一个射频(RF)单元和一个 FPGA,主要用于接收 RF 信号并获取 ISAC 信息。随后,它通过通用公共无线电接口(common public radio interface,CPRI)将这些数据传输到 BBU。
BBU 包括一个 FPGA、第一层(L1)和第二层(L2)。对于在感知方面,FPGA 对采样数据执行信号预处理。L1 层代表物理层,利用感知集成处理单元来估计目标的距离、速度和角度。所得测量结果通过前传应用编程接口(FAPI)传输至 L2 层。L2 层代表高层,负责计算目标的位置。
SF 组件负责多节点信号融合,整合来自多个节点的数据以获得更精确的感知结果。在通信方面,FPGA 对通信信息进行预处理,继而将其发送至 L1–L2 层进行解码。
Frame Structure and Signal Design
无线帧结构遵循 5G 标准中规定的原则,以确保与现有网络的兼容性。发射窗口和接收窗口的调整与协作感知需求对齐,为回波信号的采集预留了充足的时间。该原型支持在帧结构内动态分配感知资源,从而便于建立自适应感知操作。时分双工(TDD)帧结构如图 15 所示,其中发射节点与接收节点采用不同的配置。
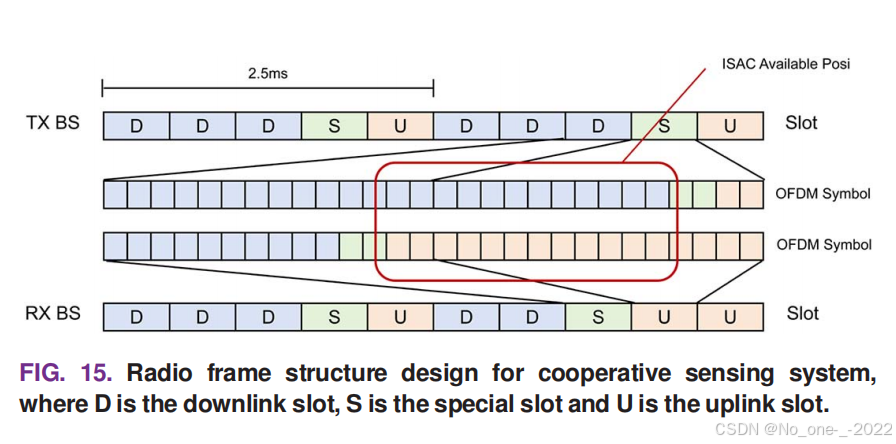
关于参考信号设计,原型采用优化的信号模式和基础序列,包括Gold序列和Zadoff-Chu(ZC)序列,以实现高分辨率感知,同时保持与通信信号的兼容性。在以通信为中心的ISAC中,原型复用5G参考信号,以最大化频谱效率并最小化网络修改。
Performance Evaluation
原型计划部署于真实环境中,以在实际条件下评估感知性能。关键性能指标将包括检测概率和定位精度。评估旨在研究协作式感知相较于单节点感知如何提升目标检测能力,专门是在困难传播环境中。
这些实验验证将为未来6G协作感知系统设计提供关键洞见,突出利用现有5G基础设施开展ISAC应用的优势。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号