


实用指南:【论文阅读】Gradient-free Decoder Inversion in Latent Diffusion Models
NeurIPS 2024paper:https://proceedings.neurips.cc/paper_files/paper/2024/file/970f59b22f4c72aec75174aae63c7459-Paper-Conference.pdf
code:https://smhongok.github.io/dec-inv.html
abstract
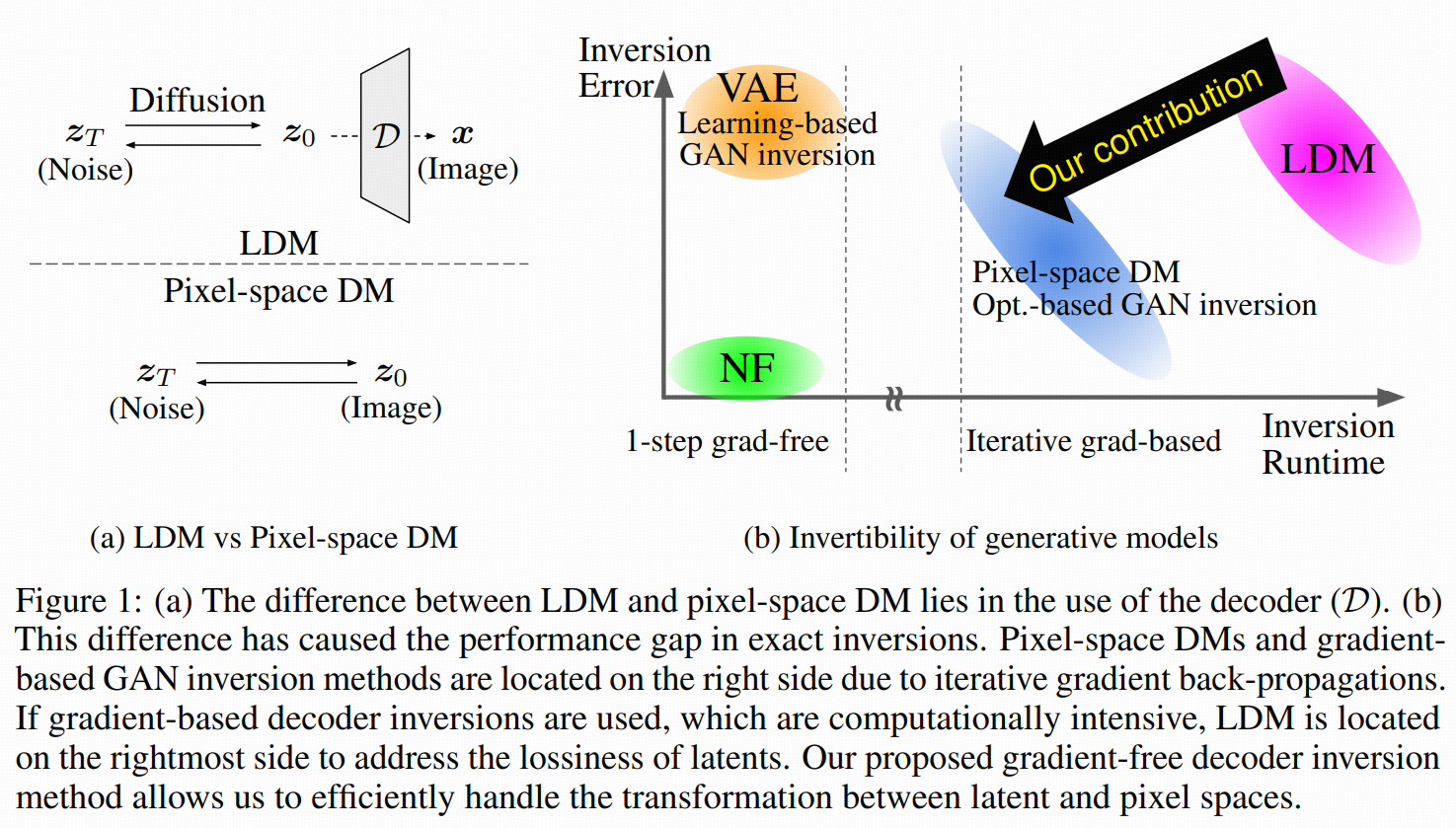
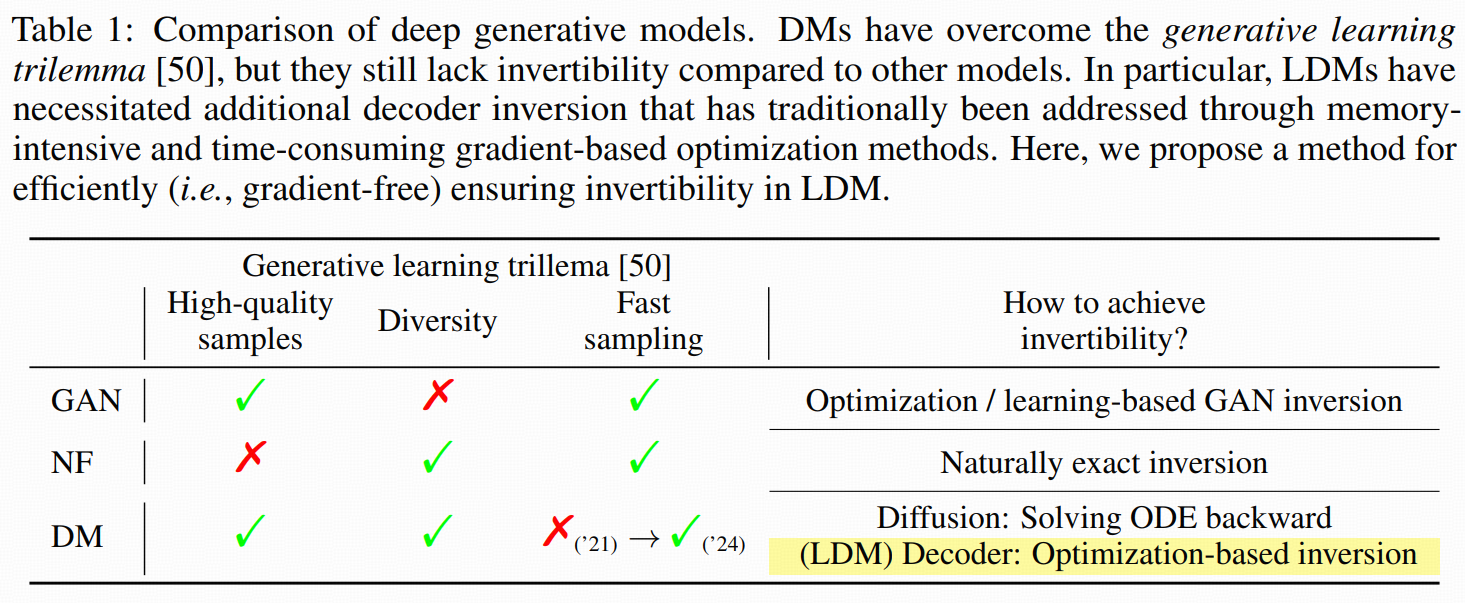
这篇文章关注的是潜空间扩散模型(LDM)里的解码器反演障碍。核心背景:
在 LDM 里,扩散是在低维 latent 空间 z 做的,最后凭借 decoder D 把 z 变回像素空间 x。
理想状态:有一个 encoder E,它是 decoder 的精确逆:
右逆:D(E(x))≈x (重建像素)
左逆:E(D(z))≈z(保持 latent)
现实中:只保证右逆(重建好看),左逆往往并不成立。这就导致:
给定一张真实图像 x,你想找到一个 latent z 满足 D(z)≈x,这个“decoder 反演”通常做得不够好。
以前的做法:
直接把 decoder D 当成 GAN 的 generator,用梯度下降优化 latent:minzℓ(x,D(z))
得对 D 反向传播,显存和算力都很吃紧。尤其是视频 LDM,一次生成十几帧甚至几十帧时,gradient-based inversion 几乎跑不动。
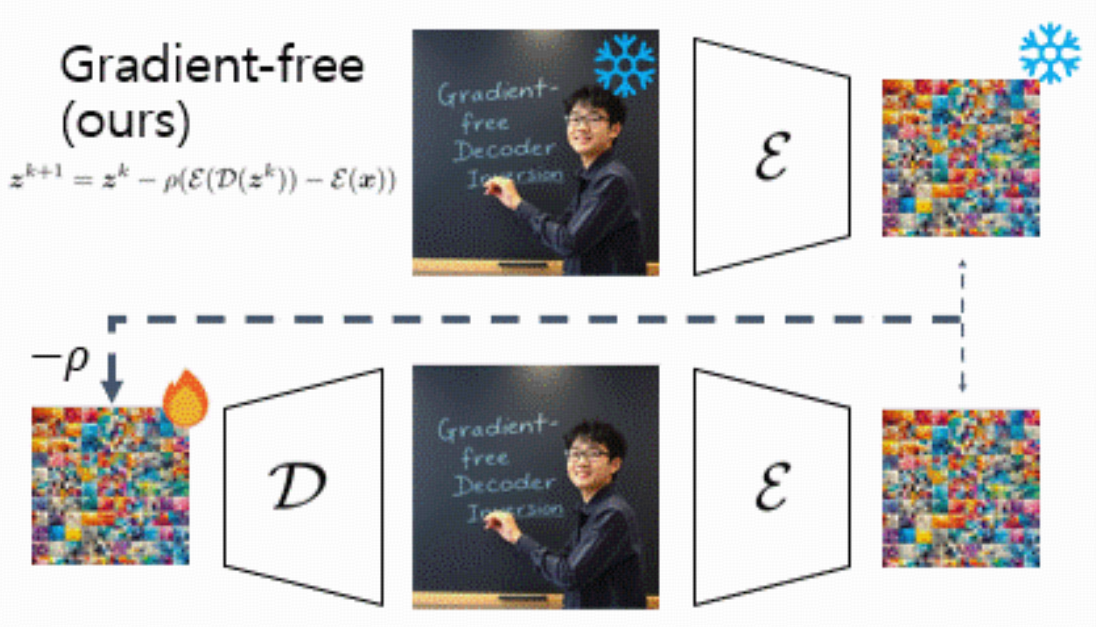
这篇工作提出:
一个完全不需要梯度的 decoder inversion 算法(gradient-free):
只调用 E 和 D,不对 D 做 backward。
在一个很温和的假设(cocoercivity 共压缩性)下,给出严格的收敛证明,包括:
朴素 forward step method
带动量的 inertial Krasnoselskii-Mann (KM) 迭代
结合 Adam 和学习率调度,实验证明:
最多 5× 更快
最多省 89% 显存
还能用 FP16 跑,但梯度法在 FP16 会 underflow。
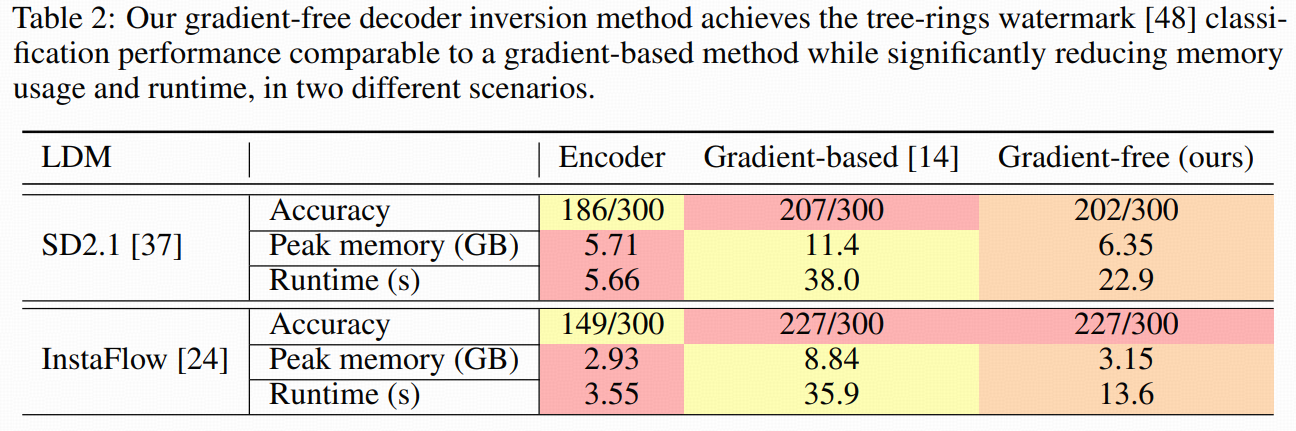
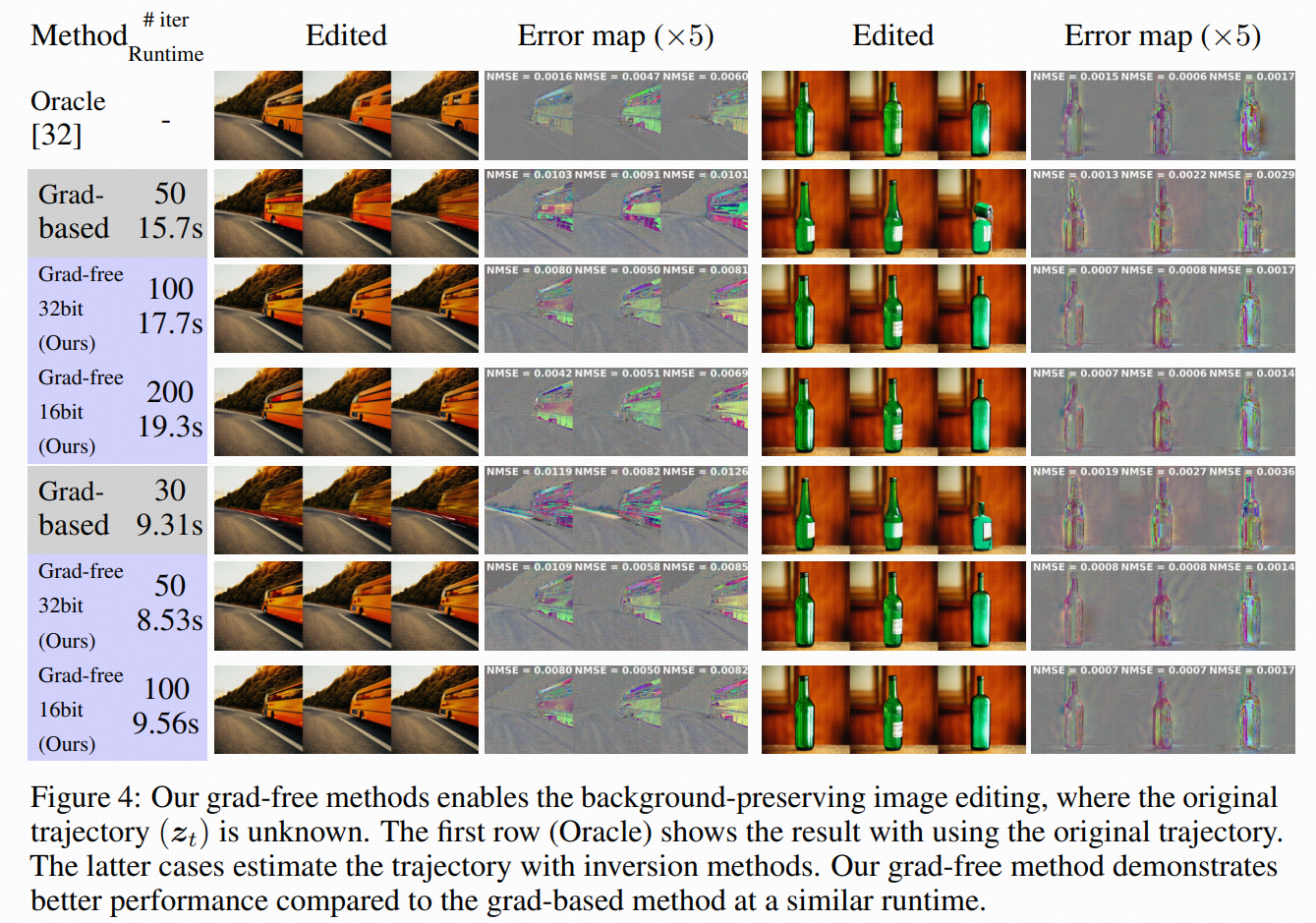
应用上,在噪声空间水印(tree-ring watermark)检测和背景保持的图像编辑里,达到了和梯度方法相近的误差水平,但大幅节省时间和内存。
主页的动图讲解:
Backgrounds
2.1 Latent diffusion models (LDMs)
这里就是点名了几种他们实验中用的 LDM:
Stable Diffusion 2.1:text-to-image LDM。
LaVie:cascade video LDM(多级 latent)。
InstaFlow:one-step text-to-image 模型。
额外强调一点:
除了 latent 这种“有损压缩”会破坏可逆性,加速采样(高阶 ODE solver)也让扩散反演更难。比如 DPM-Solver 的反向并不是简单的把 steps 倒过来。
2.2 Optimization-based GAN inversion
经典 optimization-based GAN inversion 就是:min z ℓ(x,G(z))
G:GAN 的 generator
ℓ:图像距离度量(ℓ2\、感知 loss 等)
算法:对 z 做梯度下降(L-BFGS、Adam 等)。
常见技巧两种:
(A) 用 encoder 初始化:
先训练一个 encoder E,输出 E(x)),作为优化初值 z0=E(x)。
(B) 用 encoder 做正则:
约束 z 留在 encoder 的流形附近:

本文也会用 (A),但不会像 (B) 那样把 encoder 仅仅当 regularizer,而是把它直接塞进迭代算子里当“伪梯度”。
2.3 Gradient-based decoder inversion in LDMs
LDM 的 decoder inversion 直接照搬 Eq.(1):
minzℓ(x,D(z))
梯度下降:
问题:
每次迭代都要算 ∇zD(zk)(整个 decoder 的 backward)。
对大模型 / 视频 LDM 来说,显存和时间都扛不住。
这就是本文想要替代的对象。
method
3.1 Motivation
(动机:从 x=D(z) 到 E(x)=E(D(z)))
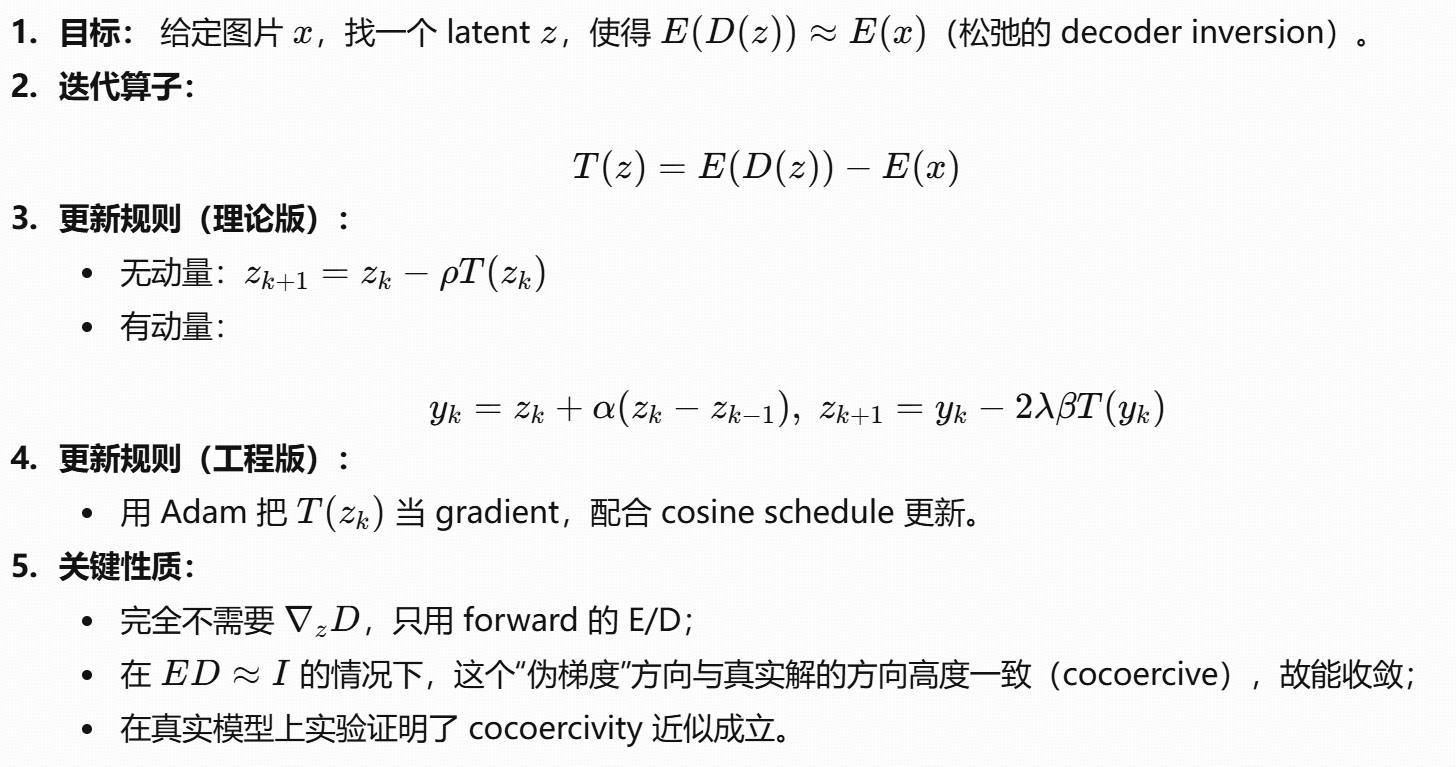
理想的 decoder inversion 目标:find z∈RF x=D(z)
问题在于:
D 是有损解码器,甚至多对一,很可能没有严格解;
就算有,直接解这个等式也没现成的结构可用。
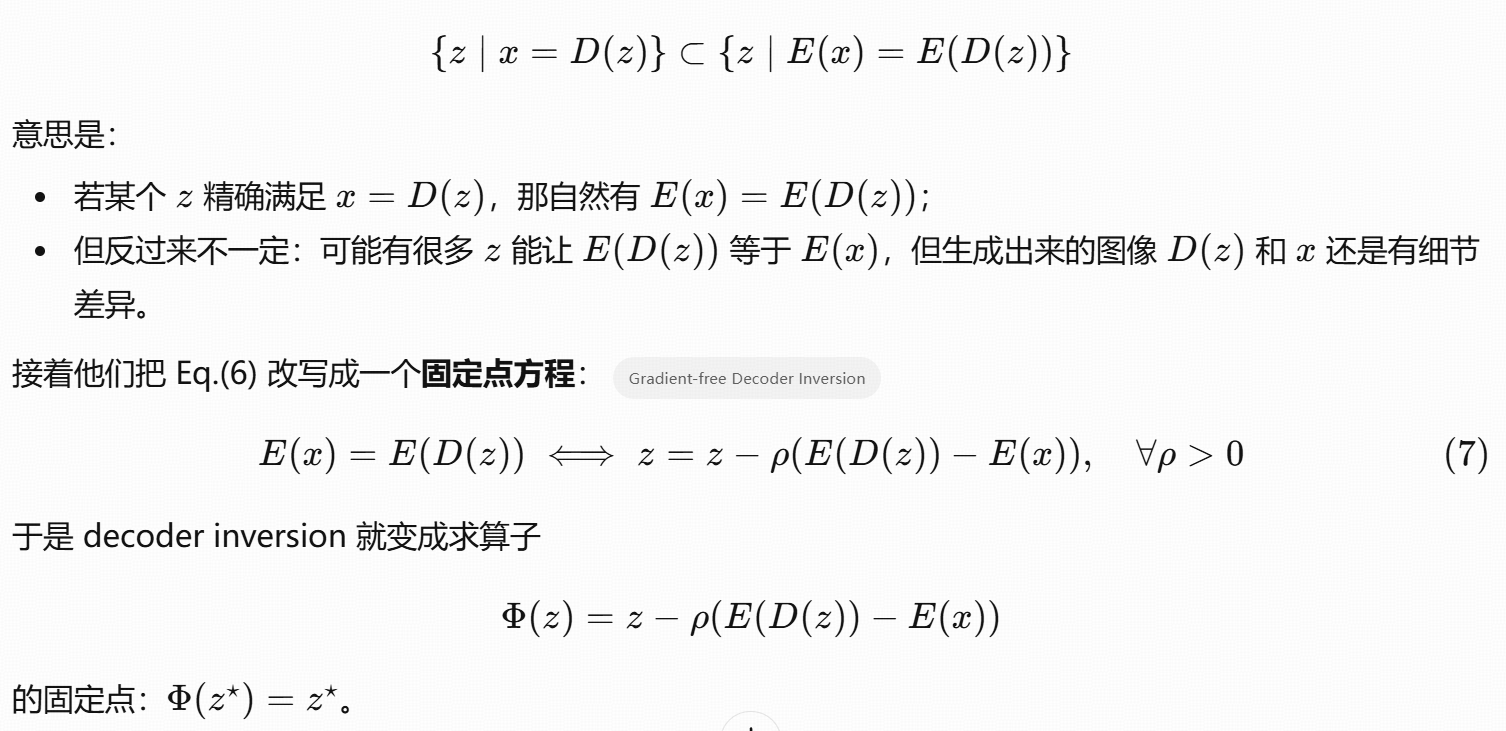
所以作者提出:退一步,只要求 E(x)=E(D(z))
直觉:
encoder E 把像素投到 latent 空间;
假设 E,DE 接近一个 autoencoder 的关系,那么要求 ED(z) 和 E(x)相等,比直接要求 D(z)=x要容易很多。
论文里的 Remark 1 写的是集合包含关系:
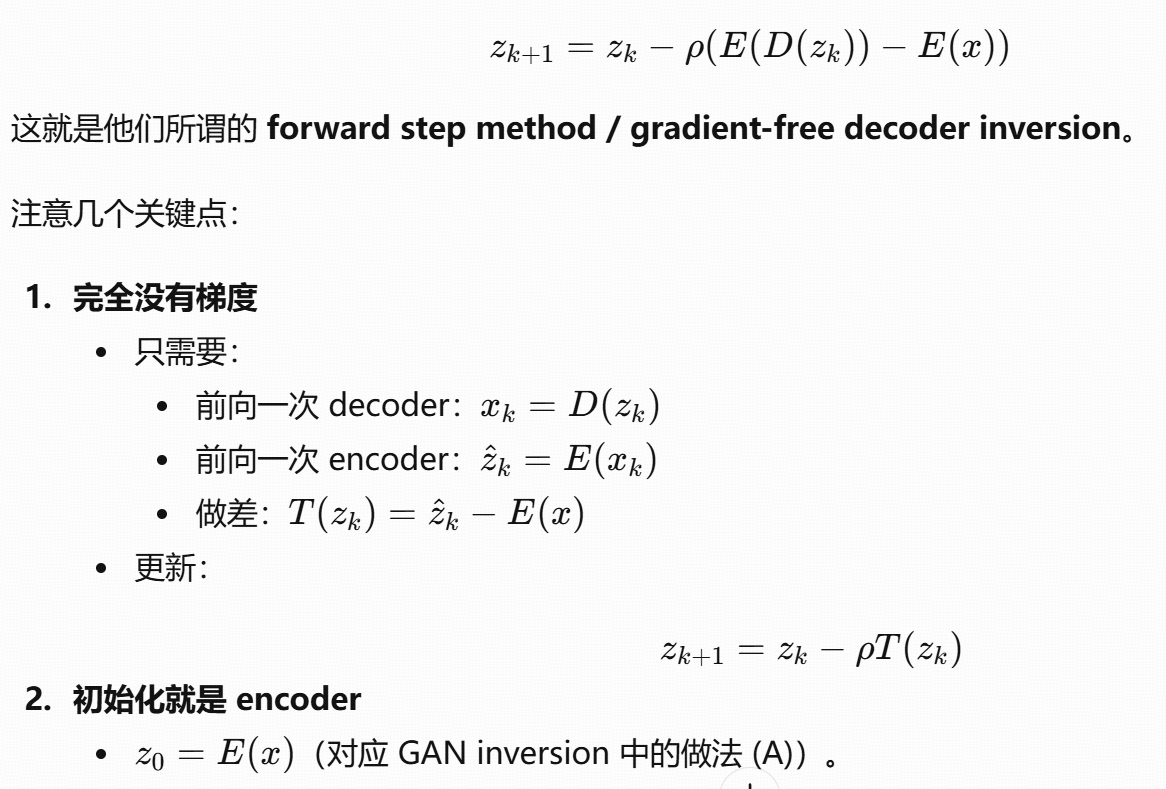
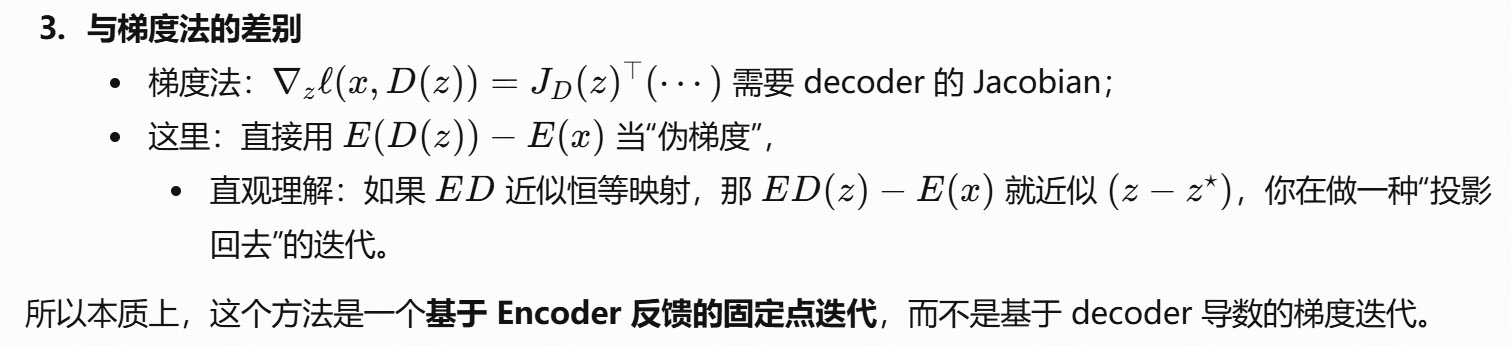
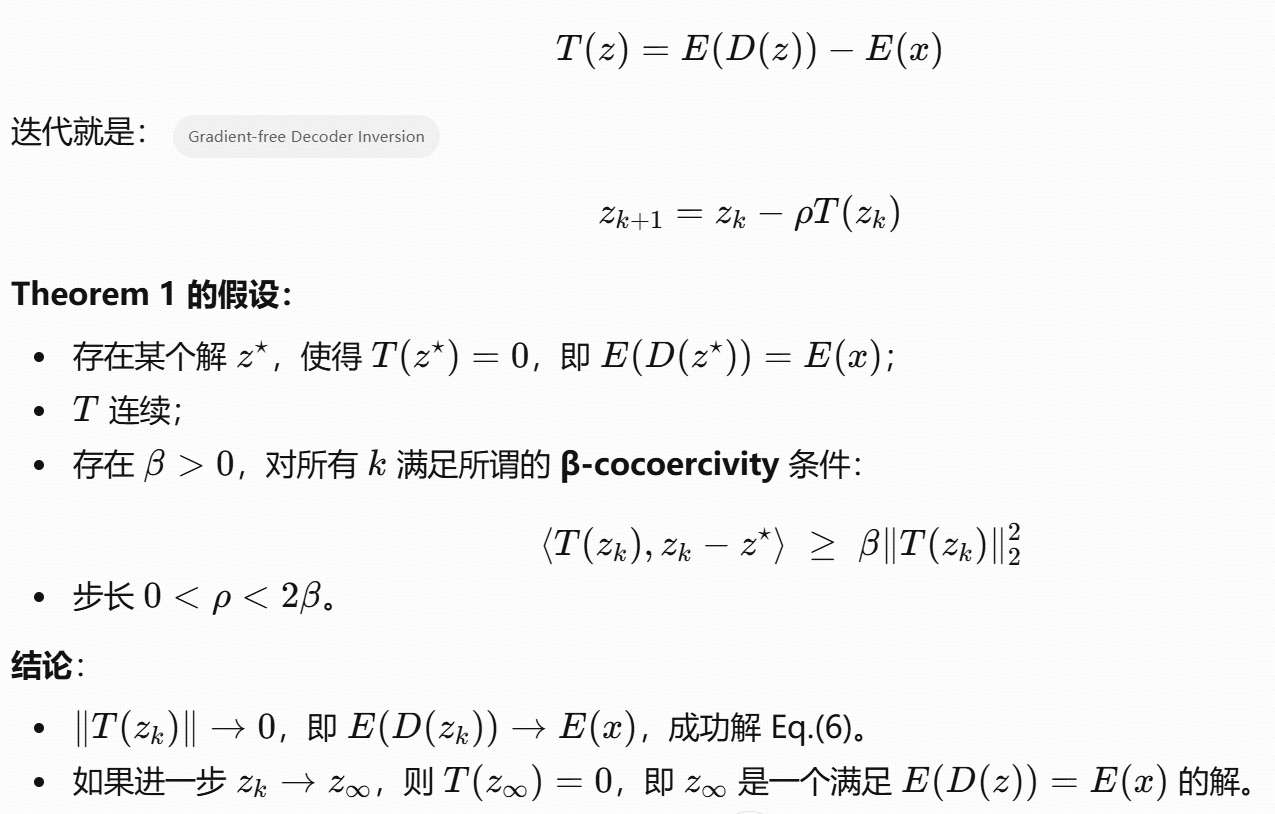
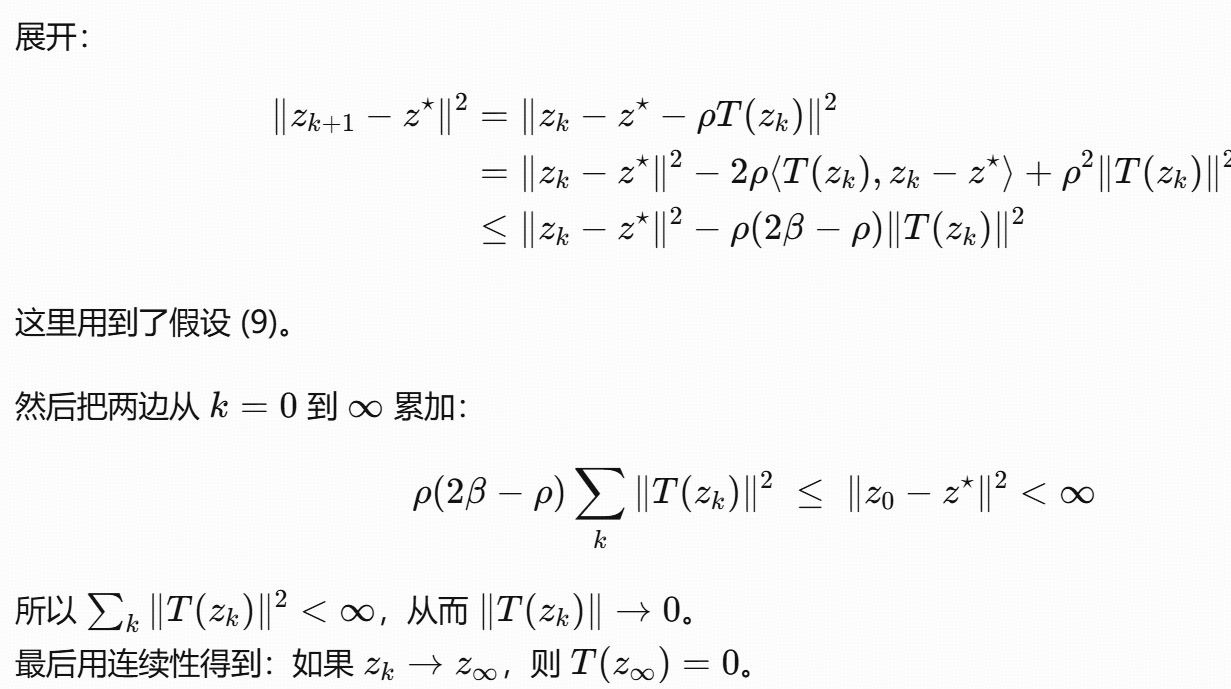
3.2 Convergence analysis on forward step method
(前向迭代的收敛)
他们把算子记作:
3.3 Convergence analysis on momentum for acceleration
为了加速,他们不满足于简单的 forward step method,而是用惯性 Krasnoselskii-Mann (KM) 迭代:
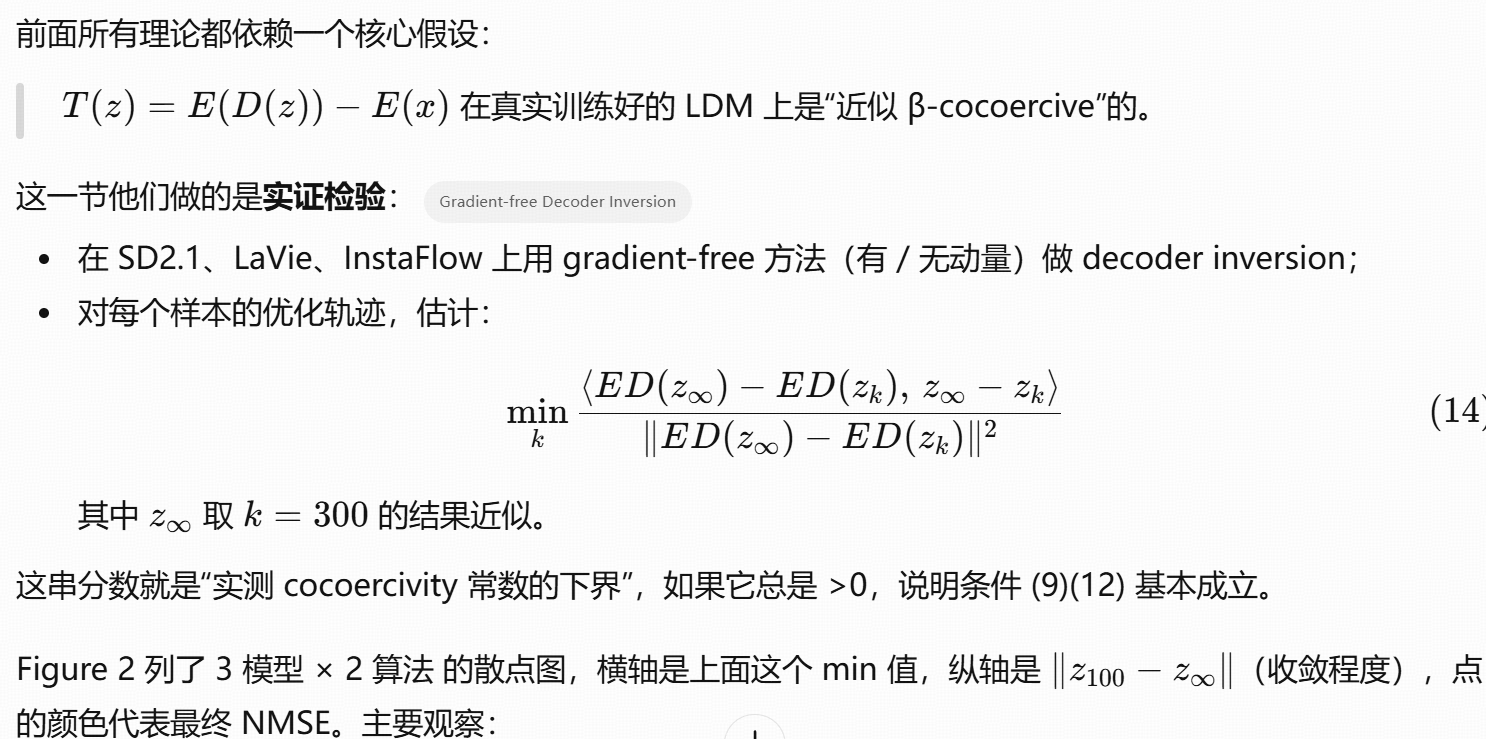
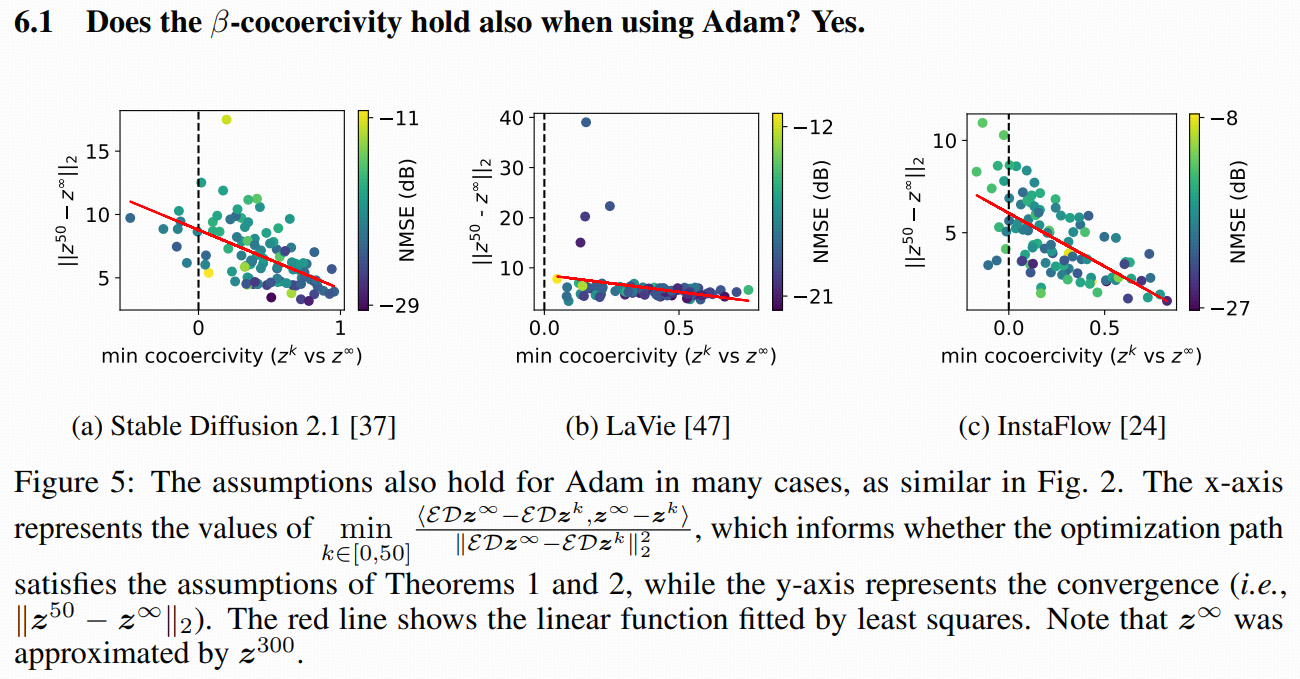
3.4 Validation of the assumption
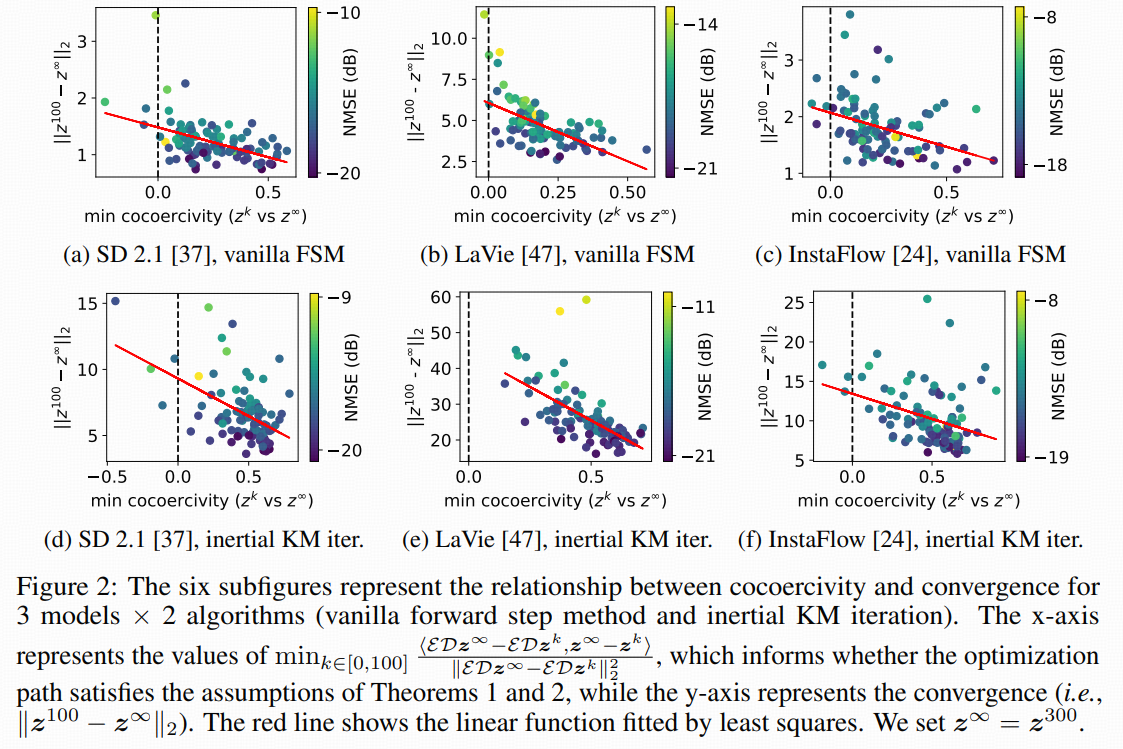
4 Experiments with practical optimization techniques
4.1 Adam optimizer
他们在这里没再做理论证明,而是直接用 Adam 来更新:
把 gk=T(zk)=E(D(zk))−E(x) 当作“梯度”;
喂给 Adam,按标准 Adam 公式更新 zk。
关键区别:
仍然不需要对 D 反向传播;
Adam 会自动做 per-dim 自适应步长,比固定 ρ 收敛更快,抖动更小。
4.2 Learning rate scheduling
他们用的是类似 [14] 的策略:
总步数为 T,
前 1/10 步:线性 warmup 到 peak lr;
中间 7/10 步:cosine decay;
最终 2/10 步:lr 固定。
这样不管总迭代是 20、50 还是 200,都有比较平滑的 lr schedule。
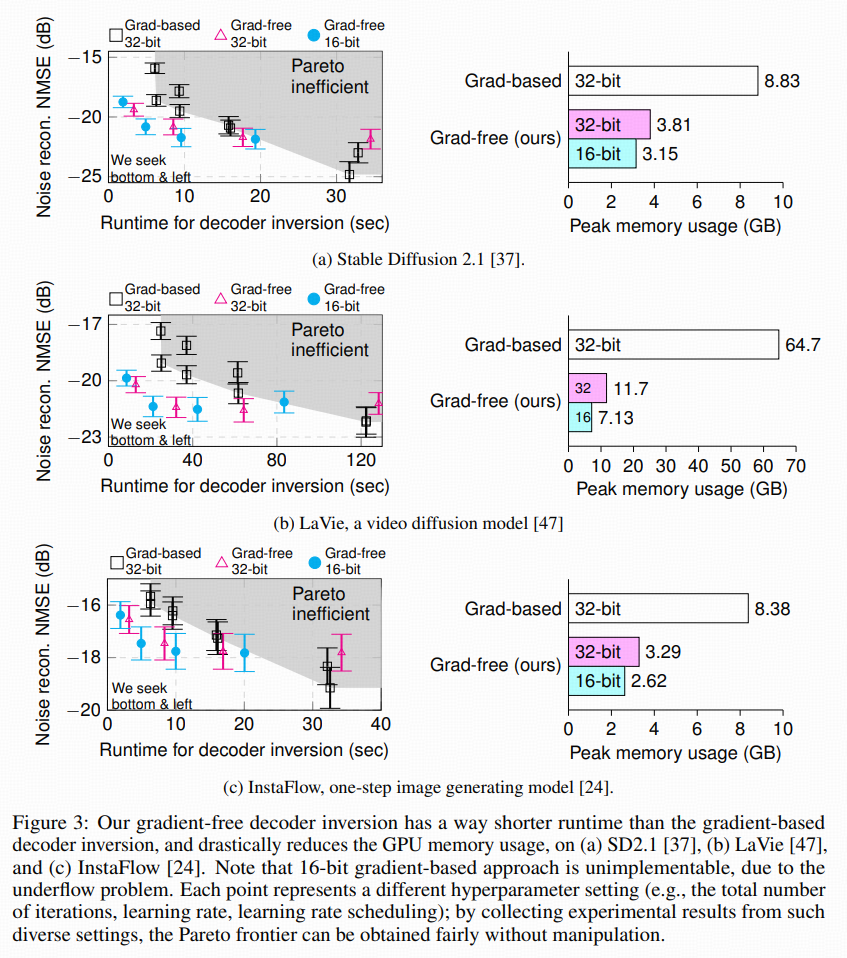
4.3 实验对比结果(和梯度法的真正差距)
Figure 3 是这篇文章非常关键的一张图:
三个模型:SD2.1、LaVie(视频)、InstaFlow(one-step)
横轴:运行时间 / 峰值显存
纵轴:inversion NMSE(dB)
每个点:一种超参组合(总迭代数、lr、scheduler 是否开启、位宽 16/32 等)。
从众多点里画出各自的 Pareto frontier,对比:
gradient-based 32-bit
gradient-free 32-bit
gradient-free 16-bit
结论非常清晰:
速度:在达到同样误差时,gradient-free 最多可快5×;
显存:视频 LDM 上最多省89%(64.7GB → 7.13GB);
精度:在给定时间预算下,gradient-free 的最优点比梯度法低约 2.3 dB(误差更小);
位宽:梯度法 16-bit 会 underflow,根本跑不起来;
通过gradient-free 因为没有 backward,能够全程 16-bit,很稳。
总结

 浙公网安备 33010602011771号
浙公网安备 33010602011771号