AUTOSAR
一、概论
1、是什么?
-
AUTOSAR全称为AUTomotive Open System ARchitecture(汽车开放系统架构)。
-
AUTOSAR是由汽车主机厂、零部件供应商、半导体厂商、软件服务商、工具提供商以及其他相关的厂商联合成立的一个组织。
1.1 来历
AUTOSAR官网将AUTOSAR的发展分成了5大阶段:
- AUTOSAR成立:Initialization(
2002-2003) - 第一阶段:Phase 1(2003-2006)
- 第二阶段:Phase 2(2007-2009)
- 第三阶段:Phase 3(2010-2012)
- 2013年开始不断更新完善:AUTOSAR continuous further development(since 2013)
2017年新的AUTOSAR自适应平台成立:AUTOSAR Adaptive Platform(since 2017)。
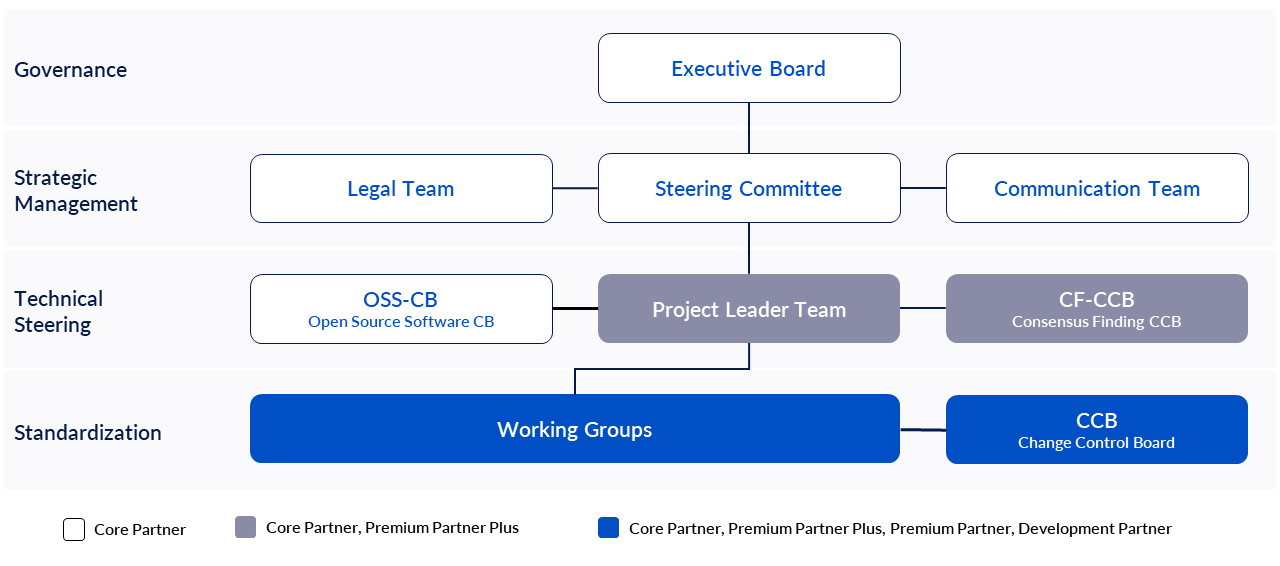
AUTOSAR的组织架构如下图所示。
2、做什么?
-
AUTOSAR的建立初衷是为了解决当前汽车电子电气架构复杂多样性,统一汽车电子电气架构标准。
-
AUTOSAR官网解释了其建立初衷和愿景:Considering the different automotive E/E architectures in the current and future markets, the partnership established a de-facto open industry standard for an automotive software architecture. It will serve as a basic infrastructure for the management of functions within both future applications and standard software modules.
3、AUTOSAR软件架构
-
AUTOSAR经常讨论的主要是指Classic platform(经典平台)。
-
AUTOSAR规范主要包含了软件架构、方法论、应用接口、一致性测试四部分。其中,软件架构是实现软硬件分离的关键,它使汽车嵌入式系统控制软件开发者摆脱了以往ECU软件开发与验证时对硬件系统的依赖。
-
AUTOSAR的最基本的理念就是分层:将软件根据功能分为不同层级,并将各个功能模块化、标准化。 -
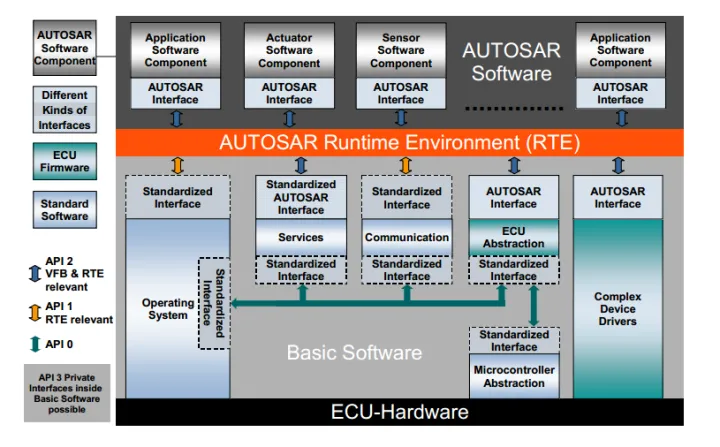
在AUTOSAR软件架构中,汽车嵌入式系统软件自上而下分别为
应用软件层(Application Software Layer,ASW)、运行时环境(Runtime Environment,RTE)、基础软件层(Basic Software Layer,BSW)和微控制器(Microcontroller)。 -
AUTOSAR整体框架为分层式设计,以中间件RTE(Runtime Environment)为界,隔离上层的应用层(Application Layer)与下层的基础软件(Basic Software)。
3.1 应用软件层
-
应用软件层(Application Software Layer,ASW)由若干个软件组件(Software Component,SWC)组成,软件组件间通过端口(Port)进行交互(软件组件之间的交互必须经过RTE层)
-
每个软件组件(SWC)可以包含一个或者多个运行实体(Runnable Entity,RE)。
-
运行实体(RE)可以简单的理解为软件中具体的逻辑控制、算法等函数,如控制大灯,空调等部件的运作,但与汽车硬件系统没有连接。
3.2.1 软件组件通信层面的新概念(VFB)
- 软件组件通信层面引入了一个新的概念,
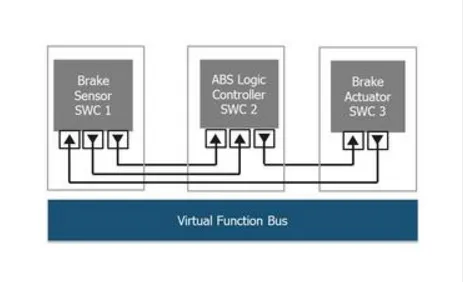
虚拟功能总线VFB(Virtual Functional Bus),它是对AUTOSAR所有通信机制的抽象,利用VFB,开发工程师将软件组件(SWC)的通信细节抽象,只需要通过AUTOSAR所定义的接口进行描述,即能够实现软件组件与其他组件以及硬件之间的通信,甚至ECU内部或者是与其他ECU之间的数据传输。
3.2.2 SWC与VFB
- 软件组件(SWC)只需向VFB发送输出信号,VFB将信息传输给目标组建的输入端口,这样的方式使得在硬件定义之前,即可完成功能软件的验证,而不需要依赖于传统的硬件系统。
3.2.3 RTE与VFB
-
中间件RTE与面向对象OO(object oriented)的编程思想非常接近
-
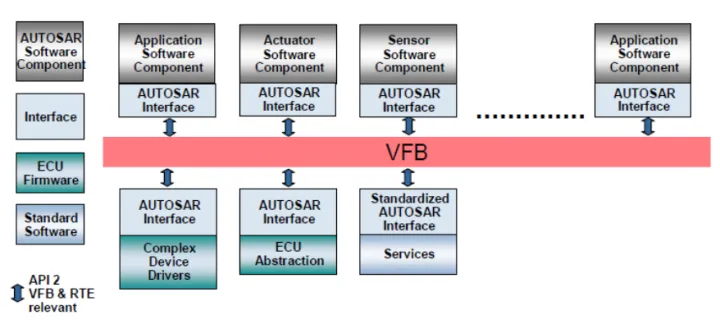
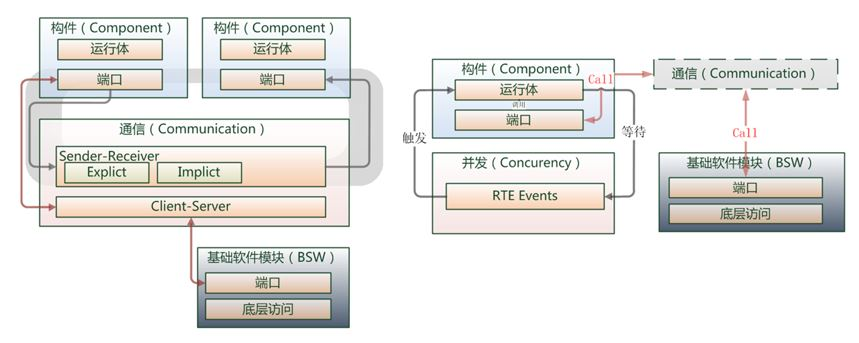
所有ECU所对应的RTE都是特定的,它负责软件构件间以及软件构件与基础软件之间的通信。对于软件构件来说,基础软件不能够直接访问,必须通过RTE进入。因而RTE也被理解成是VFB的接口实现。
构件之间及构件与基础软件的通信关系如图所示:
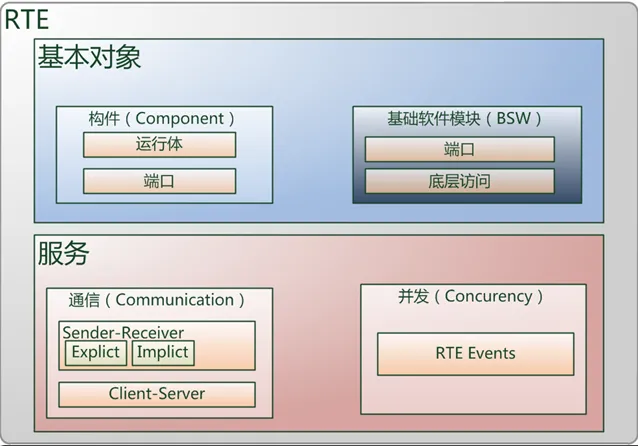
3.2 运行时环境
-
运行时环境(Runtime Environment,RTE)作为应用软件层(ASW)与基础软件层(BSW)交互的桥梁。
-
RTE主要的作用就是实现软件组件间、基础软件间以及软件组件与基础软件之间的通信。
-
RTE层是AUTOSAR标准化的关键:因为RTE封装了基础软件层的通信和服务,为应用层软件组件提供了标准化的基础软件和通信接口,使得应用层可以通过RTE接口函数调用基础软件的服务。此外,RTE抽象了ECU之间的通信,即RTE通过使用标准化的接口将其统一为软件组件之间的通信。 这样解决了应用软件层和基础软件层之间的耦合性。比如,当底层硬件改动(如MCU更改),应用软件层也不再需要改动。
3.3 基础软件层
-
基础软件层(Basic Software Layer,BSW)被抽象为四层,即
服务层(Services Layer)``、ECU抽象层(ECU Abstraction Layer)、微控制器抽象层(Microcontroller Abstraction Layer,MCAL)和复杂驱动(Complex Drivers)

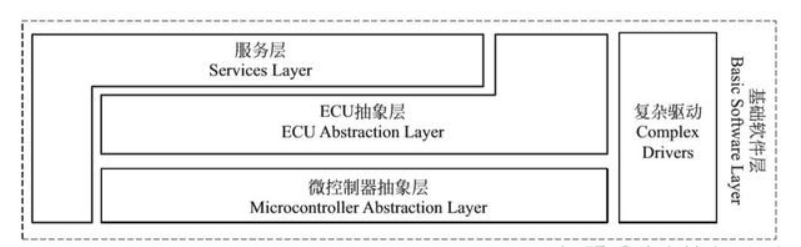
服务层包括系统服务(System Services)、存储器服务(Memory Services)、通信服务(Communication Services)等;ECU抽象层中封装了微控制器层及外围设备的驱动,并对微控制器内外设的访问进行了统一,实现了软件应用层与硬件系统的分离。微控制器抽象层位于基础软件的最底层,包含了访问微控制器的驱动(如I/O驱动、ADC驱动等),做到了上层软件与微控制器的分离,以便应用的后续的移植复用。复杂驱动由于其严格的时序为应用层通过RTE访问硬件提供支持。
-
基础软件层(BSW)为应用软件层(ASW)提供基础软件服务:包括硬件驱动,通信协议(CAN、LIN),诊断服务(如UDS),系统服务(如任务调度,资源分配等)等。
-
目前AUTOSAR规范定义最为详细的部分就是基础软件层。而且判断某个软件架构是否遵守AUTOSAR规范的主要依据就在于基础软件层。
服务层
3.3.1 系统服务(System Services)
-
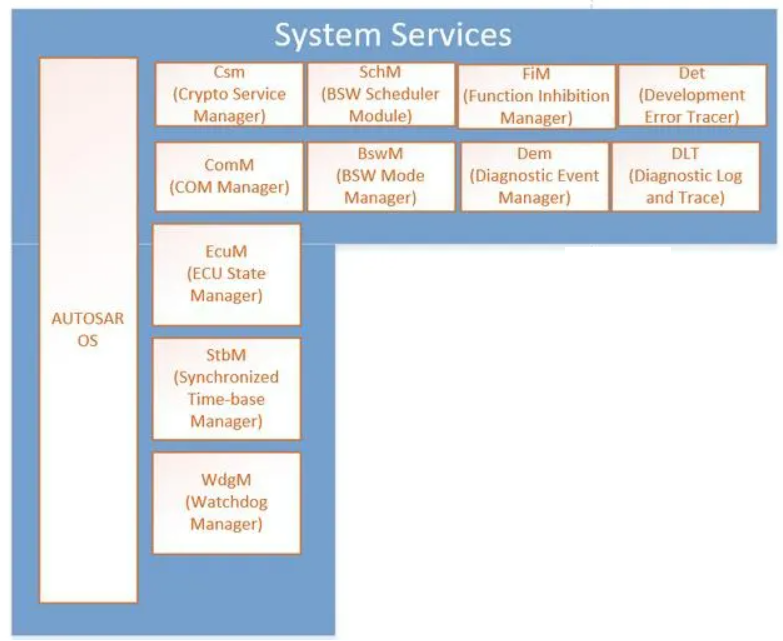
系统服务(System Services)又包括
Csm(Crypto Service Manager),SchM(BSW Scheduler Module),FiM(Function Inhibition Manager),Dem(Diagnostic Event Manager),Det(Development Error Tracer),DLT(Diagnostic Log and Trace),ComM(Communication Manager),BswM(BSW Module Manager),EcuM(ECU State Manager),StbM(Synchronized Time-base Manager),WdgM(Watchdog Manager),AUTOSAR OS(操作系统)。 -
基本都是由第三方软件公司提供,也是目前最为标准化的软件模块
系统服务(System Services)如下图所示:
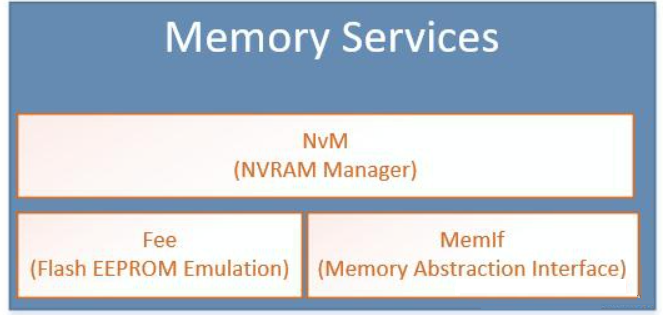
3.3.2 存储器服务(Memory Services)
- 存储器服务(Memory Services)主要由三部分组成:NvM(NVRAM Manager),Fee(Flash EEPROM Emulation),MemIf(Memory Abstraction Interface)。
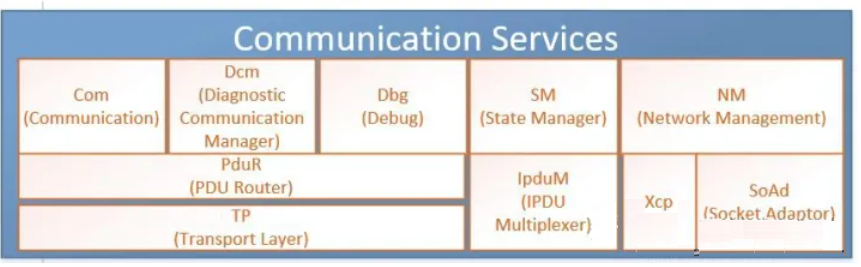
3.3.3 通信服务(Communication Services)
-
通信服务(Communication Services)主要由Com(Communication),Dcm(Diagnostic Communication Manager),Dbg(Debugging),SM(State Manager,如CanSM),NM(Network Management,如CanNm),PduR(PDU Router),TP(Transport Layer),IpduM(IPDU Multiplexer),Xcp,SoAd(Socket Adaptor)等软件模块组成。
-
这一层次的软件模块大部分由第三方公司提供,也有不少的软件模块是OEM或Tier 1开发的。
ECU抽象层(ECU Abstraction Layer)
-
ECU抽象层(ECU Abstraction Layer)包括板载设备抽象(Onboard Devices Abstraction)、存储器硬件抽象(Memory Hardware Abstraction)、通信硬件抽象(Communication Hardware Abstraction)和I/O硬件抽象(Input/Output Hardware Abstraction)。
-
ECU抽象层将ECU结构进行了抽象,负责提供统一的访问接口,实现对通信、存储器或者I/O的访问,从而不需要考虑这些资源是由微控制器片内提供的,还是由微控制器片外设备提供的。
-
ECU抽象层正如名字一样,和ECU硬件息息相关,但和MCU无关。这种无关性正是由微控制器抽象层来实现的。
微控制器抽象层(Microcontroller Abstraction Layer,MCAL)
-
微控制器抽象层(Microcontroller Abstraction Layer,MCAL),是对MCU硬件的抽象,是实现不同硬件接口统一化的特殊层。
-
微控制器抽象层分为微控制器驱动(Microcontroller Drivers)、存储器驱动(Memory Drivers)、通信驱动(Communication Drivers)以及I/O驱动(I/O Drivers)。这些驱动程序基本都是由MCU芯片厂商提供的。
-
此层软件模块主要由各个驱动程序构成。其中有我们常见的SPI驱动程序,CAN驱动程序,LIN驱动程序,MCU驱动程序等。
复杂驱动层(Complex Drivers)
- 由于对复杂传感器和执行器进行操作的模块涉及严格的时序问题,难以抽象,所以在AUTOSAR规范中这部分没有被标准化。
4、如何学习?
官网地址
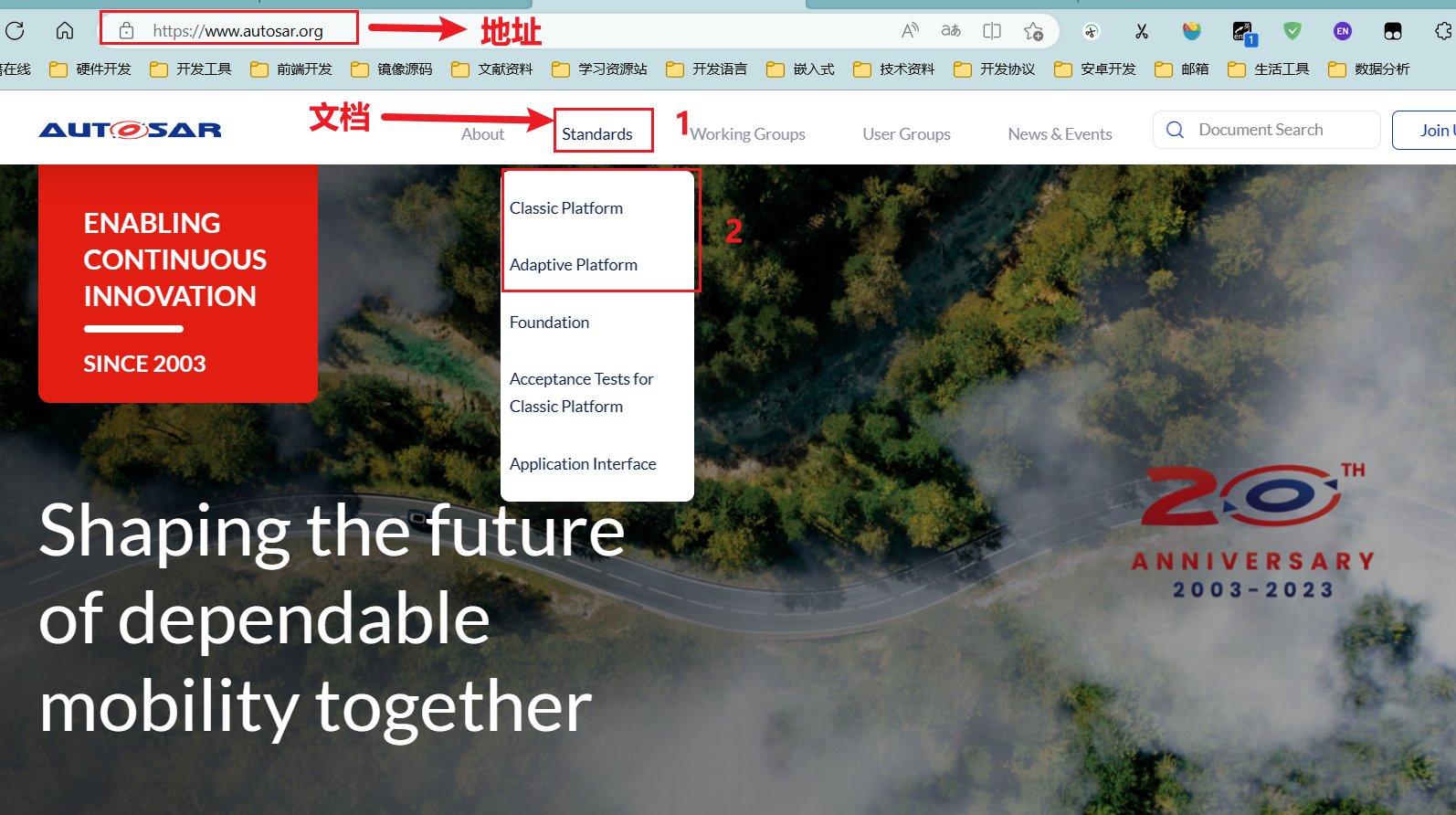
官网链接如下:
https://www.autosar.org/
AUTOSAR Classic Release R22-11:
https://www.autosar.org/search?tx_solr[filter][0]=category%3AR22-11&tx_solr[filter][1]=platform%3ACP&tx_solr[q]=
标准文档命名
AUTOSAR的文档遵循下面的命名规则,了解这些可以更容易的理解其代表的含义:
- EXP:
"解释",更详细的介绍论题 - MMOD:
"元模型",介绍 AUTOSAR的元模型 - MOD:
"建模",介绍建模的原理 - RS:
"需求规格", 详细描述需求 - SRS:
"软件需求规格", 所有软件模块的规格描述 - SWS:
"软件规格", 软件模块设计和实现的规格 - TPS:
"模板规格", 元模型详细介绍 - TR:
"技术规格",技术规格详细介绍
对于终端使用者,关注以RS,SRS,SWS,TPS,TR命名的标准文档,在使用工具进行开发配置中,其配置工具手册中也都会介绍具体资料,所以在一开始阅读所有的文档对我们帮助不大,可以在使用时,按需要详细阅读对应的AUTOSAR规范文档
从Classic AUTOSAR 入门
- 主要基于CLASSIC AUTOSAR,针对AUTOSAR的终端使用者,而非工具链开发商和平台开发人员。
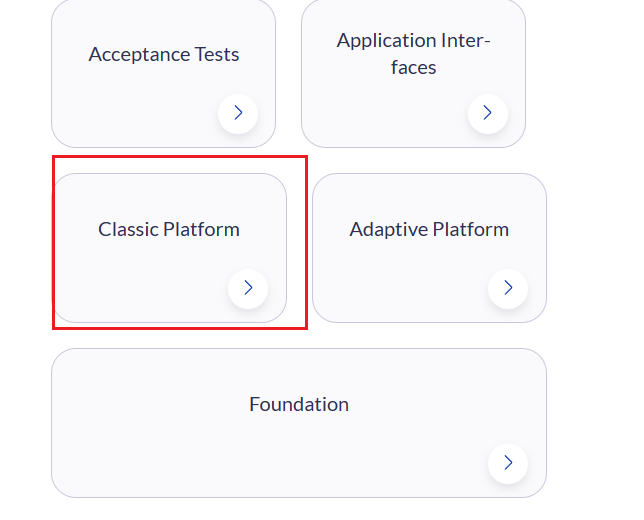
链接地址:https://www.autosar.org/standards/classic-platform
- Classic AUTOSAR 适用于实时控制,资源有限的控制器上,目前大多数的跟传感器或者执行器相连的控制器都适用。
- Adaptive AUTOSAR 适用于具有较强计算能力的芯片的控制器上,可以实现较大数据吞吐和计算能力的控制器上,一般不用于实时控制,如Domain/Zone控制器及“Vehicle Computer”。
从Adaptive AUTOSAR 深入
-
针对Adaptive AUTOSAR的入门,也建议从Classic AUTOSAR入门,
-
Adaptive AUTOSAR规范中定义的很多中间件功能族或者服务都是从Classic AUTOSAR演化而来,如果有Classic AUTOSAR的基础,那么理解Adaptive AUTOSAR也会简单很多。
-
Adaptive AUTOSAR不同于Classic AUTOSAR,职责划分很明晰,Adaptive AUTOSAR更侧重于应用层的应用,故学习Adaptive AUTOSAR,着重学习:
-
Adaptive AUTOSAR的方法论
-
SOA的架构
-
SOA的基于SOME-IP的实现机理
-
Application的SWC设计
一、角色定位
-
首先问问自己目前的角色是什么?即将成为什么角色。因为角色不同,那么AUTOSAR应用的场景也不同,自然AUTOSAR工程师要做的事情也是不同的,对AUTOSAR掌握的程度和角度也不一样。
-
AUTOSAR很多规范是给基础软件包/工具供应商或者半导体厂商参考去实现具体的BSW协议栈或者芯片对应的MCAL.
-
针对不同工作职责,需要深入了解AUTOSAR的侧重有差别:
- 针对架构工程师,仅仅需要深入了解AUTOSAR的方法论及SWC的设计方法及技巧。
- 针对算法工程师,仅仅需要深入了解SWC的设计方法。
- 针对底层芯片驱动工程师,仅仅需要深入了解芯片抽象层MCAL的各个功能模块的具体应用细节。
- 针对BSW协议栈工程师,仅仅需要了解OS,ComStack,DiagStack,Memory Stack,WgdStack等协议栈的功能及应用细节。
- 针对复杂设备驱动工程师,仅仅需要了解复杂设备驱动的AUTOSAR接口定义方式。
- 针对集成工程师,仅仅需要深入了解RTE的运行集成及RTE相关的应用配置。
二 掌握技能Classic AUTOSAR、Linux和C++
-
Linux基础,毕竟Adaptive AUTOSAR是在Linux这种操作系统之上的中间件规范。
-
C++的基本编程经验,AUTOSAR是基于C++实现的。
本文来自博客园,作者:登云上人间,转载请注明原文链接:https://www.cnblogs.com/lj15941314/p/17396554.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号