
深度滤波器(3)——深度滤波器的原理及实现
在前两篇文章中,我们介绍了三角化恢复深度信息,并对三角化过程中的误差进行了分析和讨论。
今天,我们就进入我们这个系列的正题:深度滤波器的原理及实现。
一提到深度滤波器,大家肯定首先会觉得深不可测,听名字就觉得高大上。其实,有了前面的预备知识,不难理解今天要讲解的深度滤波器的原理。
我们今天给大家介绍的是比较简单的高斯分布假设下的深度滤波器。
高斯分布是自然界中最常见的一种分布形式,并且也符合绝大部分的自然情况。简单起见,我们先假设三角化后恢复的深度值符合高斯分布。对于像素点的深度值d,满足:
P(d) = N(μ,σ2)
每当新的数据过来,我们就要利用新的观测数据更新原有的深度d的分布。
这里的数据融合的方式与经典的Kalman滤波方式大同小异。
这里,我们利用观测方程进行信息融合。
假设新计算出来的深度数据的分布为:
P(dobs) = N(μobs,σobs2)
我们将新计算出来的深度数据乘在原来的分布上,进行信息融合的更新:
我们知道,利用两个高斯分布的乘积的分布公式,可以得到融合后的高斯分布:
P(dfuse) = N(μfuse, σfuse2)
其中,
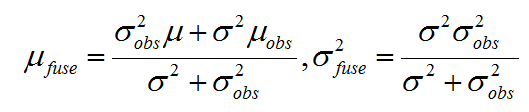
那么问题来了,这里的μobs,σobs2该如何才能得到呢?
这里的μobs实际上就是每次我们新三角化出来的深度值,而对于σobs2,如果你还对上一篇文章有印象的话,就会记得我们推导了一系列公式所得到的那个 δp(不确定度σobs),如果你忘记了,可以回去上一篇文章再复习一下。
那么原始的分布μ,σ2该如何得到呢?
这个很简单,第一次三角化出来的μ,σ2就可以作为初始值,然后每次新三角化出一个三维点,就去更新深度值的分布。
至此,我们似乎得到了一个不错的结果:既简单又优美的公式。
实际上还会存在什么问题呢?
(1)实际的深度值分布是否真的符合高斯分布?
(2)如果我们中间过程有一次三角化的过程求错了,并且还进行了信息融合,会有什么后果?
(3)我们如何避免第二个问题中所提出的情况?
这些问题留给读者去思考,也欢迎在下方给我留言,一起探讨这些问题的解决方案。
下篇文章我将会带着大家一起分析一下高博的单目稠密重建的代码,有了前三篇文章的理论铺垫,相信你读起来下一篇文章中的代码会如鱼得水。
我们下一期再见!
posted on 2017-05-01 22:55 Brad_Lucas 阅读(1541) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号