ROS2 docker 小乌龟
没用梯子,折腾了一会,记录一下过程。
环境
Ubuntu 24.04
docker
ROS2
步骤
安装docker
sudo apt update
sudo apt isntall docker.io
拉取镜像
docker pull osrf/ros:humble-desktop
启动
- 第一个容器,模拟器
xhost +local:docker # 允许 Docker 容器访问 X11
# 容器命名为ros2_humble
docker run -it --rm --name ros2_humble -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix osrf/ros:humble-desktop
# 进入容器后执行,启动小乌龟
source /opt/ros/humble/setup.bash
ros2 run turtlesim turtlesim_node
启动完成后可以看到小乌龟
- 第二个容器,控制
docker exec -it ros2_humble bash
# 进入容器后执行
source /opt/ros/humble/setup.bash
ros2 run turtlesim turtle_teleop_key
参考链接
http://dev.ros2.fishros.com/doc/Releases/Release-Humble-Hawksbill.html
遇到的问题
- AI提示的镜像地址是docker pull osrf/ros2:humble-desktop 我试了不行,实际我用的是docker pull osrf/ros:humble-desktop,从上面的参考链接可以看出humble就是当前最新的长期维护版本。
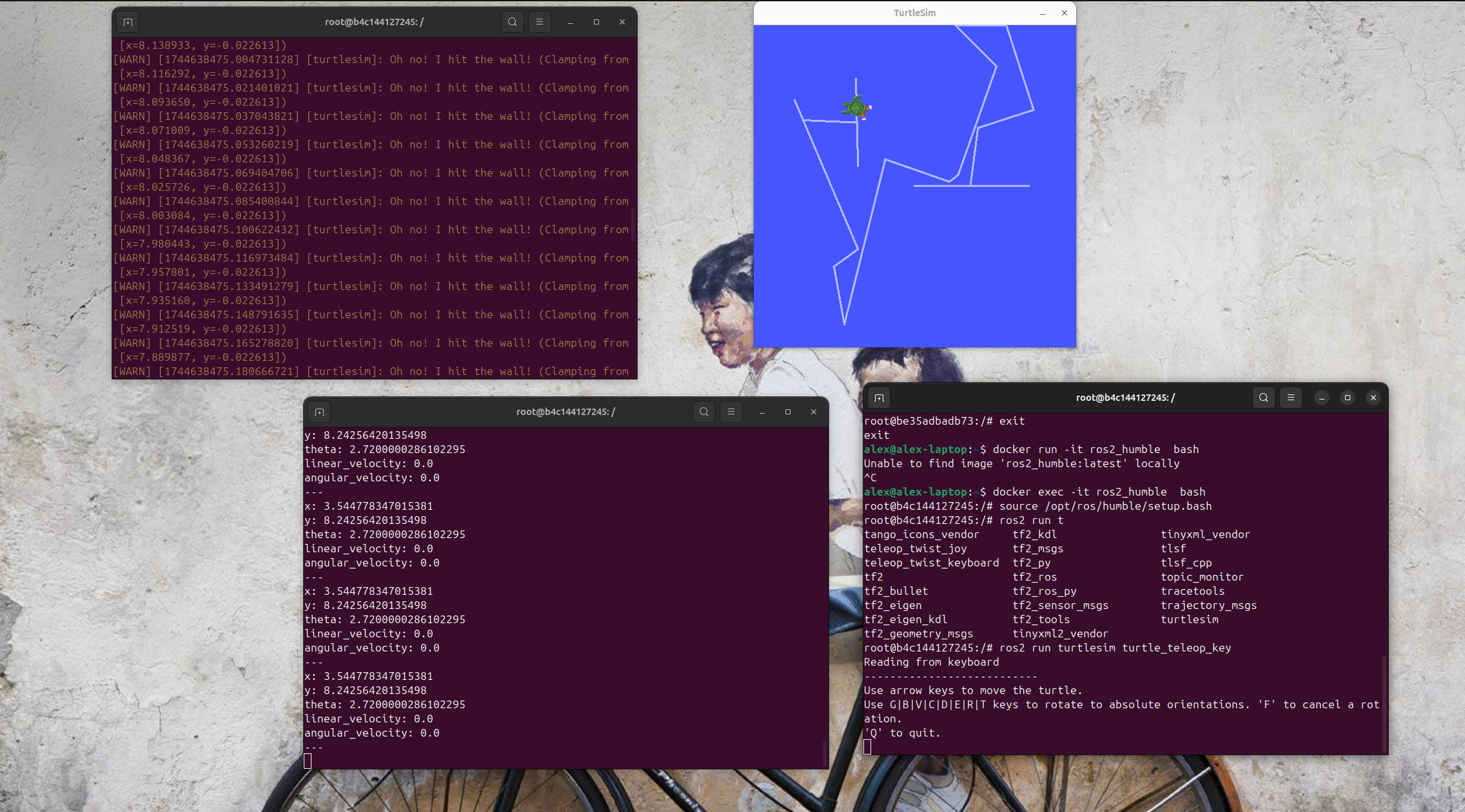
展示

 浙公网安备 33010602011771号
浙公网安备 33010602011771号