
4.5.0 头文件
import torch
from torch import nn
from d2l import torch as d2l
from matplotlib import pyplot as plt
4.5.1 初始化模型权重和偏移量
# 训练集样本数、测试集样本数、样本维度、批量大小
n_train, n_test, num_inputs, batch_size = 20, 100, 200, 5
# 设置真实权重w,元素值全为0.01,设置真实偏移量b为0.05
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
# 用数据集生成器训练集
train_data = d2l.synthetic_data(true_w, true_b, n_train)
# 将训练集打乱,然后按照批量大小进行切割和封装
train_iter = d2l.load_array(train_data, batch_size)
# 用数据集生成器生成测试集
test_data = d2l.synthetic_data(true_w, true_b, n_test)
# 将测试集按照批量大小进行切割和封装
test_iter = d2l.load_array(test_data, batch_size, is_train=False)
4.5.2 初始化模型权重和偏移量
# 初始化模型权重和偏移量
def init_params():
# 将权重元素按照标准正态分布进行初始化
w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)
# 将偏移量初始化为0
b = torch.zeros(1, requires_grad=True)
# 返回权重和偏移量
return [w, b]
# L2惩罚项
def l2_penalty(w):
# 返回L2正则项(每隔权重的平方和除以2)
return torch.sum(w.pow(2)) / 2
4.5.3 训练过程
def train(lambd):
# 初始化模型权重和偏移量
w, b = init_params()
# 定义一个匿名函数,函数名为net,函数形参为X,函数体为d2l.linreg(X, w, b),作用就是定义一个网络模型
net = lambda X: d2l.linreg(X, w, b)
# 定义均方损失函数
loss = d2l.squared_loss
# 设置训练轮数、学习率
num_epochs, lr = 100, 0.003
# 定义一个动画来将训练结果可视化
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',xlim=[5, num_epochs], legend=['train', 'test'])
# 对于每一轮训练
for epoch in range(num_epochs):
for X, y in train_iter:
# 对于每一个批量的数据
# 计算该批量的预测损失时,增加L2正则项惩罚,lambd为系数
l = loss(net(X), y) + lambd * l2_penalty(w)
# 使用随机梯度下降算法来优化权重和偏移量
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
# 每隔5轮训练,将训练得到的模型在训练集和测试集上分别计算一次损失(训练损失、泛化损失)
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),d2l.evaluate_loss(net, test_iter, loss)))
# 计算权重w的L2范数,即矩阵中各元素的平方和再开根号
print('w的L2范数是:', torch.norm(w).item())
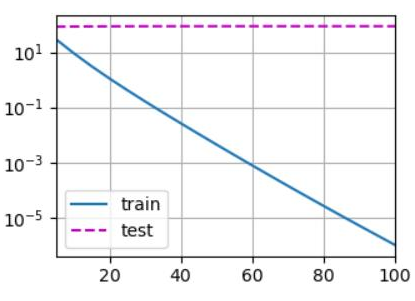
# 不使用L2正则项(不使用权重衰减)
train(lambd=0)
# 输出:
# w的L2范数是: 13.332711219787598
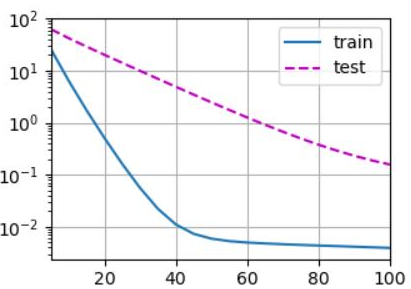
# 使用L2正则项(使用权重衰减)
train(lambd=3)
# 输出:
# w的L2范数是: 0.39131948351860046
4.5.4 可视化训练结果
plt.savefig('Output.png')
本小节完整代码如下
# ------------------------------制作数据集------------------------------------
# 训练集样本数、测试集样本数、样本维度、批量大小
n_train, n_test, num_inputs, batch_size = 20, 100, 200, 5
# 设置真实权重w,元素值全为0.01,设置真实偏移量b为0.05
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
# 用数据集生成器训练集
train_data = d2l.synthetic_data(true_w, true_b, n_train)
# 将训练集打乱,然后按照批量大小进行切割和封装
train_iter = d2l.load_array(train_data, batch_size)
# 用数据集生成器生成测试集
test_data = d2l.synthetic_data(true_w, true_b, n_test)
# 将测试集按照批量大小进行切割和封装
test_iter = d2l.load_array(test_data, batch_size, is_train=False)
# ------------------------------初始化模型权重和偏移量------------------------------------
# 初始化模型权重和偏移量
def init_params():
# 将权重元素按照标准正态分布进行初始化
w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)
# 将偏移量初始化为0
b = torch.zeros(1, requires_grad=True)
# 返回权重和偏移量
return [w, b]
# L2惩罚项
def l2_penalty(w):
# 返回L2正则项(每隔权重的平方和除以2)
return torch.sum(w.pow(2)) / 2
# ------------------------------训练过程------------------------------------
def train(lambd):
# 初始化模型权重和偏移量
w, b = init_params()
# 定义一个匿名函数,函数名为net,函数形参为X,函数体为d2l.linreg(X, w, b),作用就是定义一个网络模型
net = lambda X: d2l.linreg(X, w, b)
# 定义均方损失函数
loss = d2l.squared_loss
# 设置训练轮数、学习率
num_epochs, lr = 100, 0.003
# 定义一个动画来将训练结果可视化
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',xlim=[5, num_epochs], legend=['train', 'test'])
# 对于每一轮训练
for epoch in range(num_epochs):
for X, y in train_iter:
# 对于每一个批量的数据
# 计算该批量的预测损失时,增加L2正则项惩罚,lambd为系数
l = loss(net(X), y) + lambd * l2_penalty(w)
# 使用随机梯度下降算法来优化权重和偏移量
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
# 每隔5轮训练,将训练得到的模型在训练集和测试集上分别计算一次损失(训练损失、泛化损失)
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),d2l.evaluate_loss(net, test_iter, loss)))
# 计算权重w的L2范数,即矩阵中各元素的平方和再开根号
print('w的L2范数是:', torch.norm(w).item())
# 不使用L2正则项(不使用权重衰减)
train(lambd=0)
# 输出:
# w的L2范数是: 13.332711219787598
# 使用L2正则项(使用权重衰减)
train(lambd=3)
# 输出:
# w的L2范数是: 0.39131948351860046
# ------------------------------可视化训练结果------------------------------------
plt.savefig('Output.png')

 浙公网安备 33010602011771号
浙公网安备 33010602011771号