ps-insar与offset-tracking形变量与形变速率常识
在 PS-InSAR(永久散射体干涉雷达) 处理中,每个日期的形变量确实是 相对于主影像(Master)的累积形变量。以下是详细解释:
1. PS-InSAR的形变量本质
在 PS-InSAR(永久散射体干涉雷达) 处理中,每个日期的形变量确实是 相对于主影像(Master)的累积形变量,PS-InSAR的形变速率计算并非基于相邻影像间的差分干涉。
-
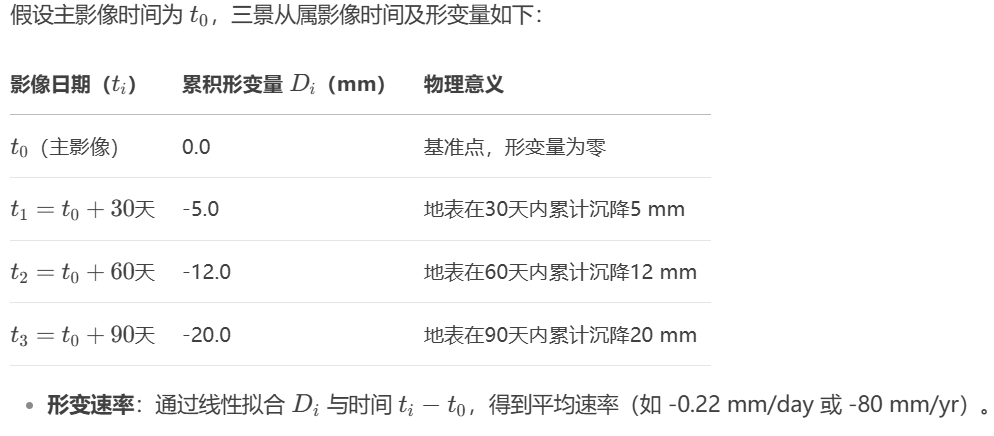
主影像基准:PS-InSAR以 第一景影像(或选定的主影像) 作为参考基准(形变量设为0),所有后续影像的形变量均相对于该主影像计算。
-
累积形变:每个从属影像(Slave)的形变量表示从 主影像时刻(t0)到当前影像时刻(ti) 的地表总位移量,是时间上的累积值。
![image]()
- 所以,ps-insar最后一天的[累积形变量-0(主影像)]×365/天=mm/yr。
-
2. SNAP软件offset-tracking
- 在 SNAP软件 中使用 Offset-Tracking 方法计算的两景影像形变速率,默认单位通常不是 mm/yr,而是 米/天(m/day)。
- 1. 在Offset-Tracking处理时,手动指定与PS-InSAR相同的主影像(Master)。
- 2. 所有从属影像(Slaves)与主影像配准,计算主-从影像对的位移量。
- 3. 将位移量除以时间间隔,得到相对于主影像的日均位移速率(m/day),再转换为累积形变量。
- 优点:基准一致,便于直接融合PS和Offset-Tracking结果。
- 缺点:若主影像质量差(如大气干扰大),会影响Offset-Tracking精度。
- 在GIS软件(如QGIS)中叠加PS和Offset-Tracking结果,填补空白区。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号