原地址https://blog.csdn.net/liaoxu02/article/details/48107651
Cortex-M3拥有通用寄存器R0-R15以及一些特殊功能寄存器。R0-R12是最”通用目的“的,绝大多数的16位指令只能使用R0-R7,而32位的Thumb-2指令则可以访问所有的通用寄存器。特殊功能寄存器必须通过专用的指令来访问。
通用目的寄存器R0-R7
R0-R7称为低组寄存器。所有指令都可以访问,R8-R12称为高组寄存器,只有很少的16位Thumb指令能访问他们,32位的Thumb-2指令则不受限制。
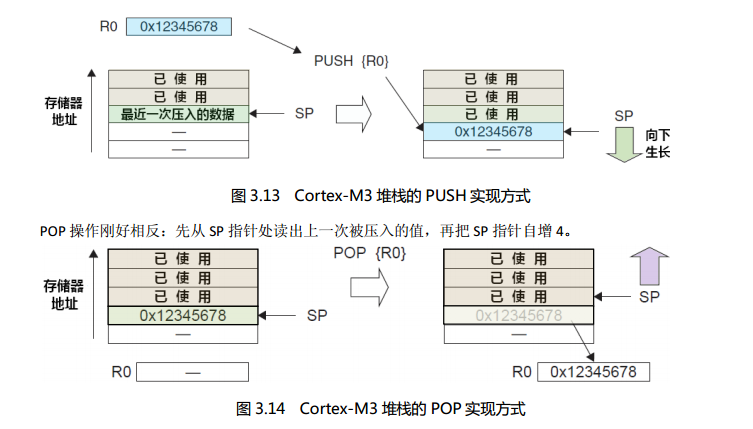
访问堆栈用堆栈指针,并且PUSH指令和POP指令默认使用SP。
堆栈的PUSH与POP
堆栈是一种存储器的使用模型。它由一块连续的内存和一个栈顶指针组成,用于实现”后进先出“的缓冲区。其最典型的应用,就是在数据处理前先保存寄存器的值,再在处理任务完成后从中恢复先前保护的这些值。
注:寄存器的PUSH和POP操作永远都是4字节对齐的。原因是:堆栈指针的最低两位永远是0。
栈内存操作
在Cortex-M3中,除了可以使用PUSH和POP指令来处理堆栈外,内核还会在异常处理的始末自动PUSH和POP操作。
堆栈的基本操作
堆栈的功能就是把寄存器的数据临时备份在内存中,以便将来能恢复之——在一个任务或一段子程序执行完毕后恢复。
.....(主程序) ; R0, R1=Y, R2=Z BL Fx1 Fx1 PUSH {R0} ;把R0存入栈&调整SP PUSH {R1} ;把R1存入栈&调整SP PUSH {R2} ;把R2存入栈&调整SP ..... ;执行Fx1的功能,中途可以改变R0-R2的值 POP {R2} ;恢复R2早先的值&再次调整SP POP {R1} ;恢复R1早先的值&再次调整SP POP {R0} ;恢复R0早先的值&再次调整SP BX LR ;返回 ;返回主程序 ;R0=X,R1=Y.R2=Z(调用Fx1的前后R0-R2的值完好无损)
PUSH/POP指令足够体贴,支持一次操作多个寄存器。
Cortex-M3的堆栈实现
Cortex-M3使用的是”向下生长的满栈“模型。堆栈指针SP指向一个被压入堆栈的32位数值。在下一次压栈时,SP先自减4,在存入新的数值。如下图:
在看看Cortex-M3的双堆栈机制
我们上面已经知道了堆栈是分为两个:主堆栈和进程堆栈,CONTROL[1]决定如何选择。
当CONTROL[1]=0时,只使用MSP,此时用户程序和异常handler共享同一个堆栈。
这里写图片描述
当CONTROL=[1]=1时,线程模式将不再使用MSP,而改用PSP(handler模式永远使用MSP)。
这里写图片描述
这样的好处是:在使用OS的环境下,只要OS内核仅在handler模式下执行,用户应用程序仅在用户模式下执行,这样就可以防止用户程序的堆栈错误破坏OS使用的堆栈。
通过读取PSP的值,OS就能够获取用户应用程序使用的堆栈,进一步地知道了在发生异常时,被压入寄存器的内容,而且还可以把其它寄存器进一步压栈。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号