
1 概述
四旋翼是一个很好的平台,无论是用于娱乐还是作为专业学习。尤其作为航天系统专业的同学而言,没有真实产品的支撑,只能依靠仿真软件进行数字设计,所能考虑到的状态无法涵盖真实产品的应用边界,所能考虑到的误差特性与实际存在较大差异,因此迫切需要基于一个类似平台进行应用级开发实践。四旋翼就是一个不错的选择,其所需应用到的专业技术体系可以说一个“小总体”,牵涉气动、动力、制导、控制等,各种软件算法也与航天系统的应用极为相似,因此强烈建议基于四旋翼平台进行开发学习(“基于产品做设计才能真正掌握精髓”),亮点为:
- 涉及加表(加速度计)、陀螺仪、磁力仪、GPS、气压计、光流、数传、电机、电源等硬件;
- 涉及气动、PID/稳定回路控制、导引、任务规划、探测、数据通信等分系统;
- 涉及PID控制算法、惯测组合标定、惯性导航、多传感器信息融合、协同制导、群目标分配等算法;
- 附加项。涉及双目摄像头、TX2等硬件;
- 附加项。涉及双目测距/测向、目标识别、深度学习等软件算法;
- 未完待续ing......
2 组成
四旋翼主要包含以下几个重要组件:
- 机架,提供机械接口以及约束限制螺旋桨尺寸。
- 飞控板,飞行控制电路板/集合,一般集成了加表、陀螺等传感器。
- 电调(ESC),将飞控板输出的控制信号转换为电机的输入信号。
- 电机,根据电调的输出信号进行旋转输出转速。
- 螺旋桨,旋转,提供升力。
- 电池,供电。
- 遥控器,用户进行油门及机动指令控制。
- GPS,进行四旋翼定位。
3 总体配置方案
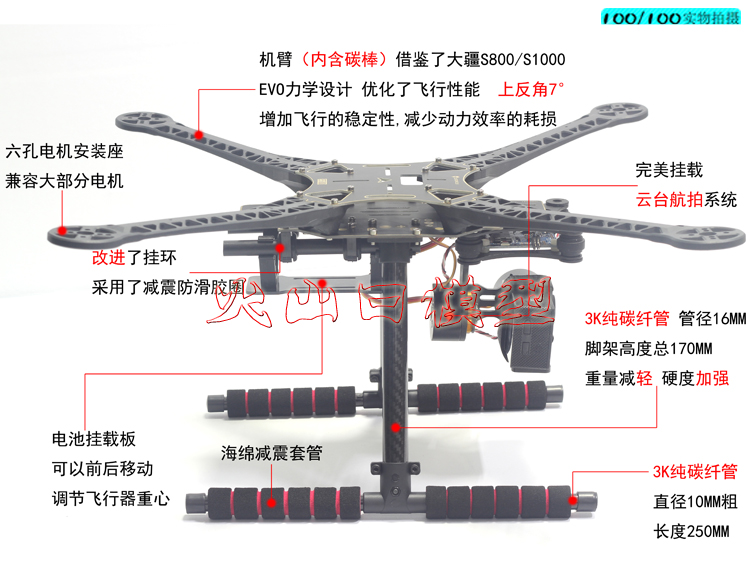
3.1 机架
选配S500(轴距485mm,最大支持12寸螺旋桨),考虑因素:
- 与螺旋桨的搭配;
- 外挂云台、摄像机等。
详见下图,图片源自淘宝。
![]()
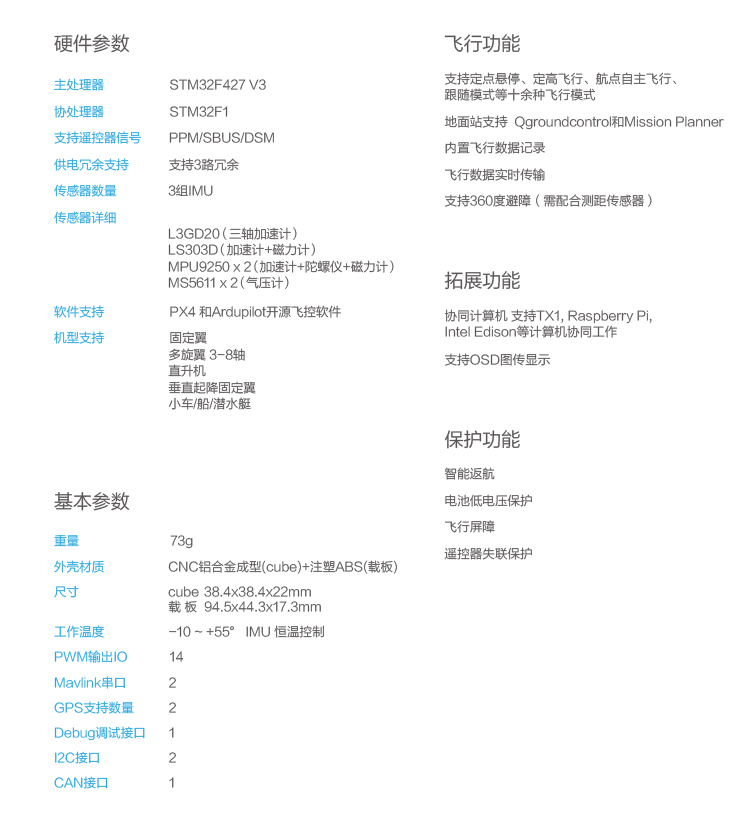
3.2 飞控板
由于主要是基于四旋翼平台进行开发学习,因此选用一个可DIY且传感器丰富的飞控平台,推荐pixhawk2.1。
详见下图,图片源自淘宝。
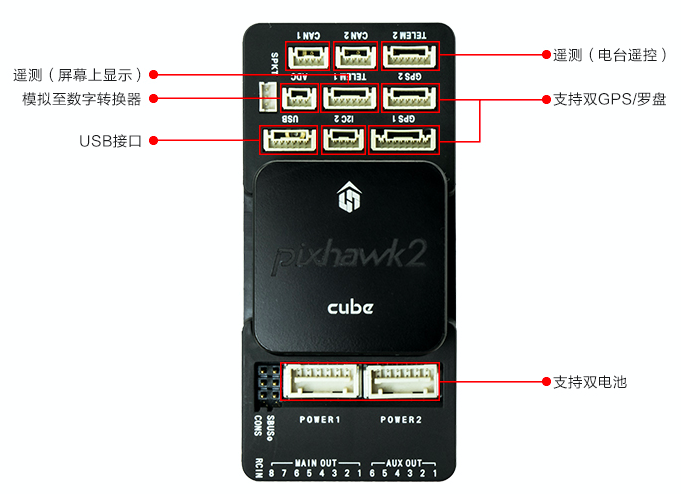
pixhawk2.1配置官方说明,详见下图。
3.3 电调ESC
选配好盈铂金30A,可持续承受30A电流,最大允许40A电流(持续时间不大于10min)。这里主要考虑一下两点:
- 续航电流。与电机的选配相关,应大于电机+螺旋桨在100%油门情况下所需的电流(详见下文)。
- BEC输出。由于老式的遥控器接收机需要单独的5-6V供电,因此需要电调有个BEC输出口,进行遥控器接收机的供电。当前市面上的遥控器接收机一般均可以直接采用飞控板的输出口进行供电,因此可选配NO BEC的电调ESC。
详见下图,图片源自淘宝。
![]()

3.4 电机及螺旋桨
3.4.1 电机基础知识
本节主要参考了WalkAnt的博客。
- KV值:每1V的电压下电机每分钟空转的转速(如KV800:1V的电压下空转转速是800转每分钟;10V的电压下空转转速是8000转每分钟)。KV值越小,同等电压下转速越低,扭力越大,可带更大的桨。KV值越大,同等电压下转速越高,扭力越小,只能带小桨。相对的说KV值越小,效率就越高。航拍要选用低KV电机配大桨,转速低,效率高,同样低转速电机的震动也小。
- 电机型号:如2212,3508,4010,这些数字表示电机定子的直径和高度。前面两位是定子直径,后面两位是定子高度,单位是毫米。
- 顺丝、反丝:与螺旋桨配合时与电机顺时针旋转、逆时针旋转有关,详见后文总装方案。
3.4.2 螺旋桨基础知识
本节主要参考了WalkAnt的博客。
- 螺旋桨规格:一般由4位数字表示,前两位数表示直径,后两位表示螺距。以1060浆为例,10表示桨的直径是10英寸,60表示浆角(螺距,6.0英寸,也就是152.4mm)。
- 正桨、反桨:与螺旋桨配合时与电机顺时针旋转、逆时针旋转有关,详见后文总装方案。
3.4.3 螺旋桨与机架配置方案
本节主要参考了WalkAnt的博客。
机架轴距 = (桨的英寸*25.4/0.8/sqrt(2))*2
桨的尺寸(英寸) = (机架轴距/2)*sqrt(2)*0.8/25.4
可由以上公式进行初步估算,但是最终可酌情处理,只需螺旋桨半径不大于机架机臂长度即可。
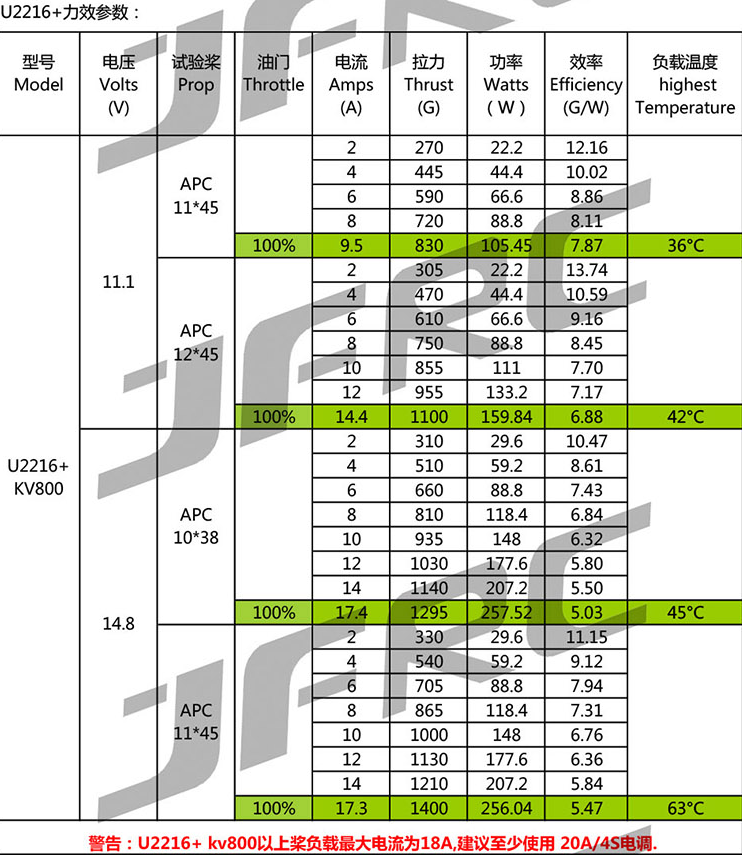
3.4.4 电机、螺旋桨、电调配置方案
电机选配飓风U2216+(顺丝2个、反丝2个);螺旋桨选配ATG1147(正桨2个、反桨2个)。
详见下图,图片源自淘宝1、淘宝2。

3.4.5 电机、螺旋桨、电调配置方案主要考虑因素
-
整机重量约束,单个电机+螺旋桨时如下图所示。
注:一般选择2/5~3/5的100%油门状态作为巡航状态,进而保证四旋翼有足够的裕量抗风及其他干扰!!!
![]()
-
电调巡航电流须大于100%油门对应的电流,最好保留5A的裕度。
-
选电机一定要看参数表(如上图所示),如果没有参数表,请不要选择!!!!!!
-
四旋翼整体升力估算(估算时1145螺旋桨参数),由图可知,按2/5效率估算,目前整体升力为2240g,因此在进行四旋翼总体配置方案,只需将重量控制在2240g以内即可。
![]()

3.5 电池及平衡充
3.5.1 电池基础知识
- 电池容量,如5200mAh:以5.2A电流放电,可以放1小时。
- 放电能力,与电池容量一起约束电池的最大持续放电电流,有
最大持续放电电流=电池容量X放电C
如5200mAh、30C的电池,则最大的持续电流就是(5.2X30=156)A。如果该电池长时间超过156安或以上电流工作,那么电池的寿命会变短。 - 电池片数,如4S:该电池有4片电池串联组成。充满电时,单片电池的电压一般4.15-4.20V(4S电池对应16.6-16.8V)。
- 保护电压:为保证电池最佳供电状态,应设置单片电池最低电压为3.6V以上(4S对应14.4V,切记不要过放)。
3.5.2 电池及平衡充配置方案
-
电池选配Lion 4S 5200mAh 30C,对外接口为XT60接头(主要考虑是与pixhawk2.1的Power Brick Mini相匹配)。
详见下图,图片源自淘宝。
![]()
-
平衡充选配i-max B6
详见下图,图片源自淘宝
![]()
-
须另外购买T插母头转xt60公头
详见下图,图片源自淘宝
![]()



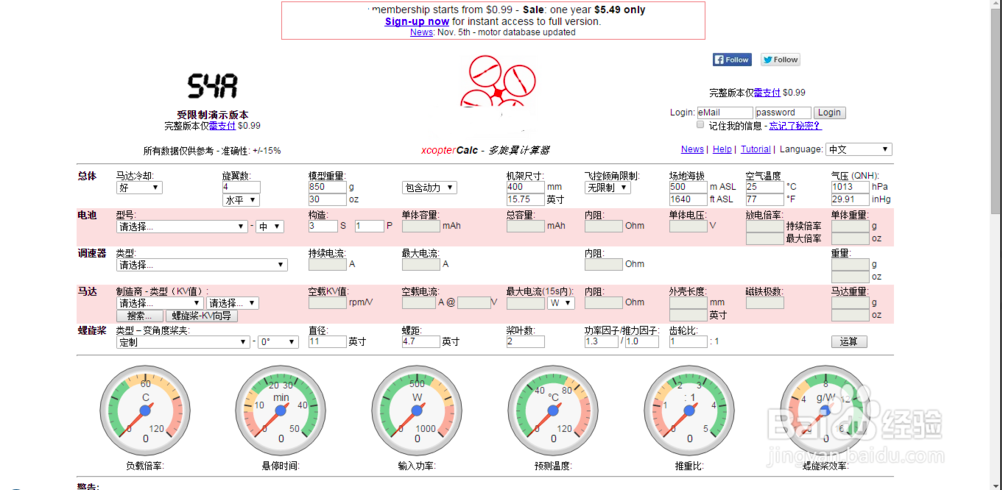
3.5.3 四旋翼续航时间评估
详见 多旋翼飞行器动力系统计算器。
3.6 遥控器
选配MC8B遥控器。
详见下图,图片源自淘宝

选配时须注意以下两点:
- 需与店家确定,该款遥控器与飞控板pixhawk2.1匹配;
- 遥控器最好使用充电电池,避免总买电池;
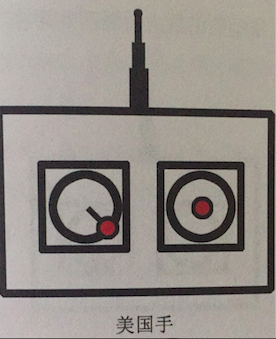
- 最好选择美国手(左手油门),后续在飞控解锁时比较简单;
- 选择有S.Bus通信的遥控器接收机,进而可以避免购买PPM Sum Receiver。
![]()
3.7 GPS
选配使用赫星的HERE GPS。
详见下图,图片源自淘宝

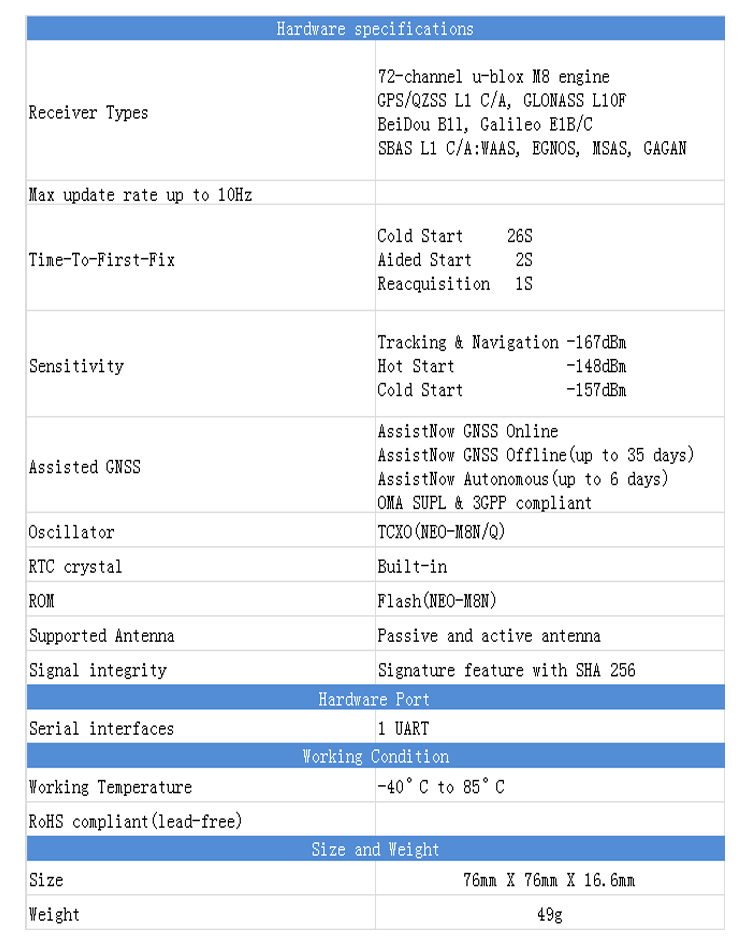
选配时主要考虑以下三点:
- 自带安全开关;
- 有条件的同学可以配置一个赫星的差分导航产品ublox RTK GPS HERE+ M8P,实现厘米级定位(官方是这样宣传的)。
- 商家提供了GPS性能参数表,觉得比较正规。
![]()
4 总体配置方案列表
详见下表。由表可知,四旋翼整理重量约为1476g,远小于2240g的整体升力,总体方案合理可行。

5 总装方案
所有正极电缆均为红色、所有负极电缆均为黑色
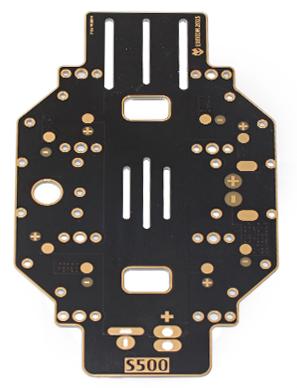
-
S500机架自带的电路板需注意正负极性,且所有正极均相连、所有负极均相连、“S500”标识附近提供电池T插头/XT60插头焊接点(下图的中圆点)。
![]()
-
将所有电调与电机相连(三根线无序连接即可),并接好电源(注意正负号)
-
螺旋桨暂时不安装,完成无桨调试后再安装螺旋桨
-
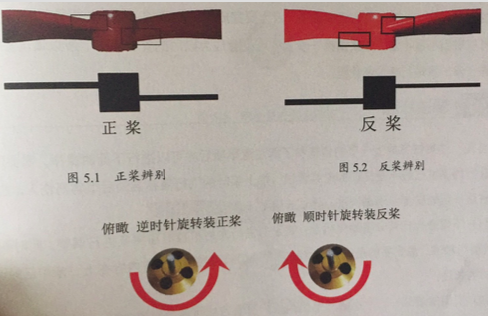
电机旋转方向,如下图所示。
![]()
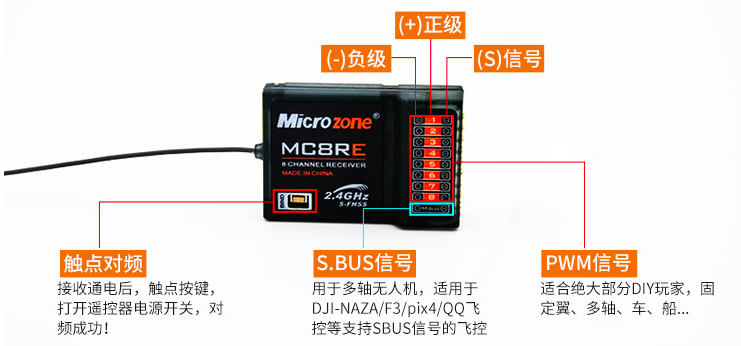
-
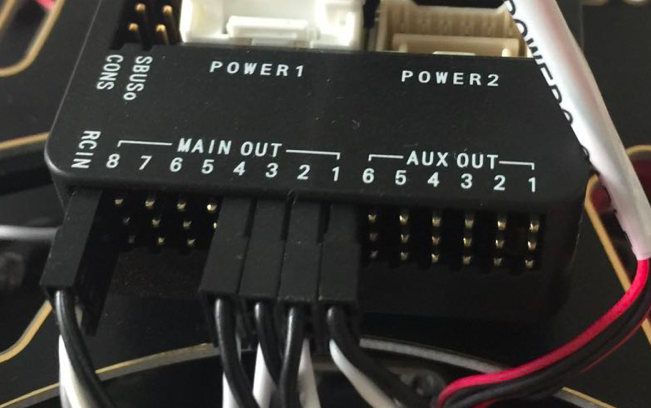
电机依次按序号连接pixhawk2.1的MAIN OUT(-+s:负极线/正极线/信号线)。若电调只有两个线,则黑线为负极线,白线为信号线。
![]()
-
遥控器接收机通过S.BUS连接至pixhawk2.1的RCIN口(注意-+s须一一对应)。
-
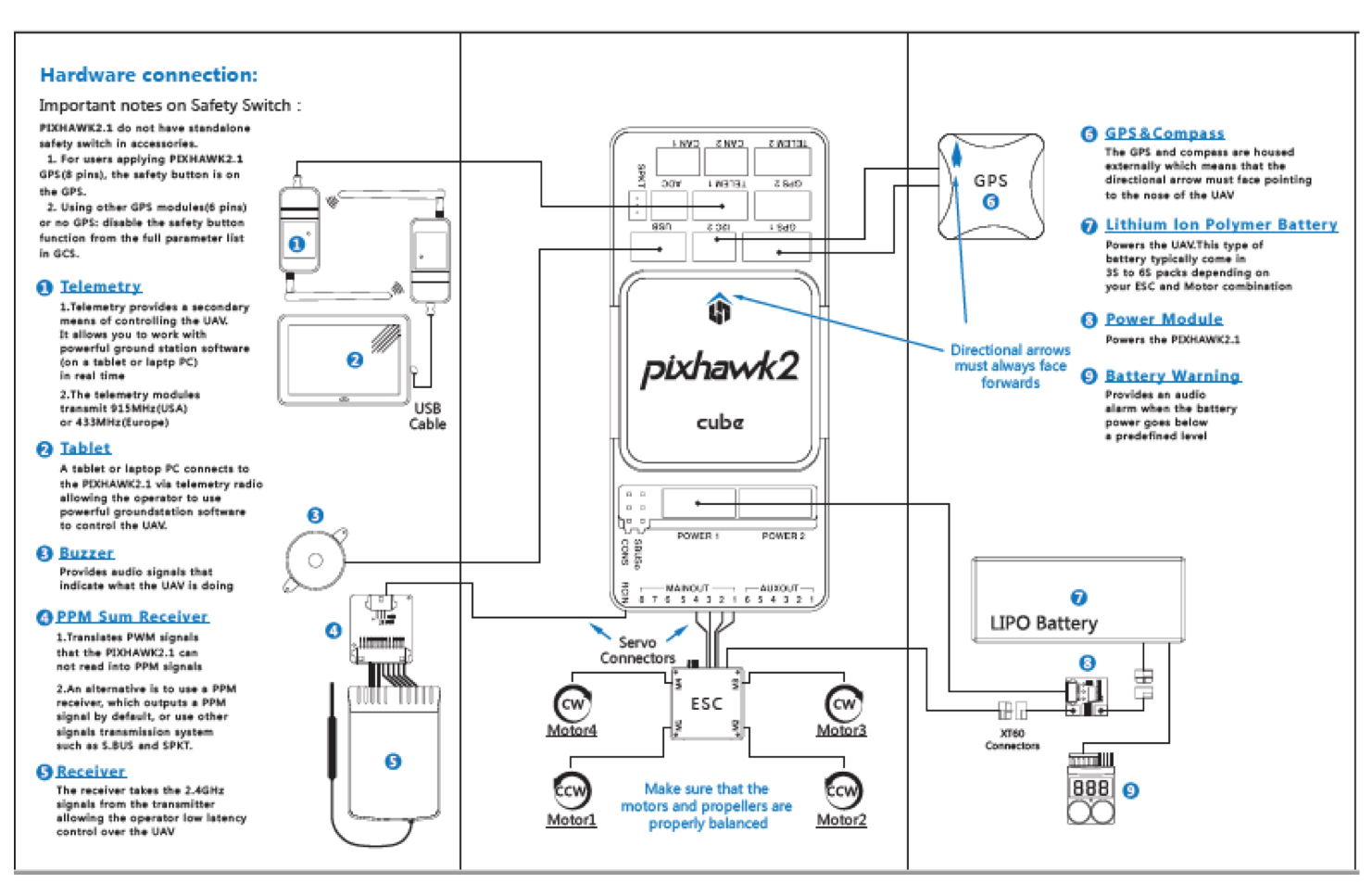
pixhawk2.1外部配件连接示意图如下所示。
![]()

6 调试方案
- 配置MAC系统PX4的开发环境
- 打开QGroundControl
- 在Vehicle Setup-Firmware中将pixhawk2.1固件升级
- 在Vehicle Setup-Airframe中将pixhawk2.1设置为“Generic Quadrotor X”
- 在Vehicle Setup-Sensors中校准pixhawk2.1的传感器:磁力仪Compass、陀螺仪Gyroscope、加表Accelerometer、水平位置Level Horizon
- 将遥控器打开,将遥控器接收机与pixhawk2.1连接好,按遥控器说明完成对码
- 在Vehicle Setup-Radio中校准遥控器
- 在Vehicle Setup-Flight Modes中定义飞行模型
- 在Vehicle Setup-Power中定义电池参数:4S、单片满压4.2V、单片空压3.6V
- (可选)在Vehicle Setup-Power中校准电调ESC
- 在Vehicle Setup-Safety中定义低压保护措施、数据通信失联措施等
- 首先进行无桨调试,确认电机旋转方向与要求一致,若某个电机旋转方向与要求转向相反,此时只需换接电调、电机的三根线中任意两根即可
- 电机顺时针旋转则采用顺丝电机、电机逆时针旋转则采用反丝电机
- 螺旋桨与电机安装要求
![]()
7 试飞流程
-
打开遥控器,设置飞行模式开关为稳定或特技模式
-
连接锂电池,gps红色(单闪)和蓝色指示灯交替闪烁
-
等待60s,gps启动时间
-
按下gps圆形安全按钮不松,红灯快闪(双闪)
-
解锁(美国手,左手油门):油门右下,方向杆不动,保持5秒钟。(上锁--电机关机:油门左下,方向杆不动,保持5秒钟)
![]()
-
解锁成功,有提示(由disarmed转为armed)
-
拉高油门起飞。
8 成品及实验
-
成品
![]()
-
调试中ing
![]()
-
外场试飞ing
试飞视频


9 注意事项
- 在机架将pixhawk2.1、GPS固定安装后,再进行磁力仪Compass的校准;若pixhawk2.1、GPS存在相对移动时,磁力仪Compass须重新校准。这主要是由于赫星GPS上带磁力仪,当pixhawk2.1、GPS搭配时,系统默认赫星GPS上带的磁力仪为主磁力仪,主次磁力仪相对角度不能过大,否则无法安全解锁!
- 当电池电压低于上节调试方案中定义的单片空压(3.6V)时,无法安全解锁!
- 提示灯光及声音的含义详见官网!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号