

【无人机通信】无人驾驶飞行器对低空经济的对策_基于MIMO蜂窝系统的联合通信和干扰研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
无人驾驶飞行器对低空经济的对策:基于MIMO蜂窝系统的联合通信和干扰研究
摘要
随着低空经济成为国家战略新兴产业,无人驾驶飞行器(UAV)与电动垂直起降飞行器(eVTOL)的规模化应用面临空域管理、通信安全与基础设施适配等核心挑战。本文聚焦MIMO蜂窝系统在低空通信中的创新应用,提出基于联合通信与干扰(JCJ)的解决方案,通过动态频谱共享、智能干扰抑制与空地协同优化,实现低空空域资源的高效利用与安全保障。研究结合政策导向与产业实践,为低空经济规模化发展提供技术支撑与实施路径。
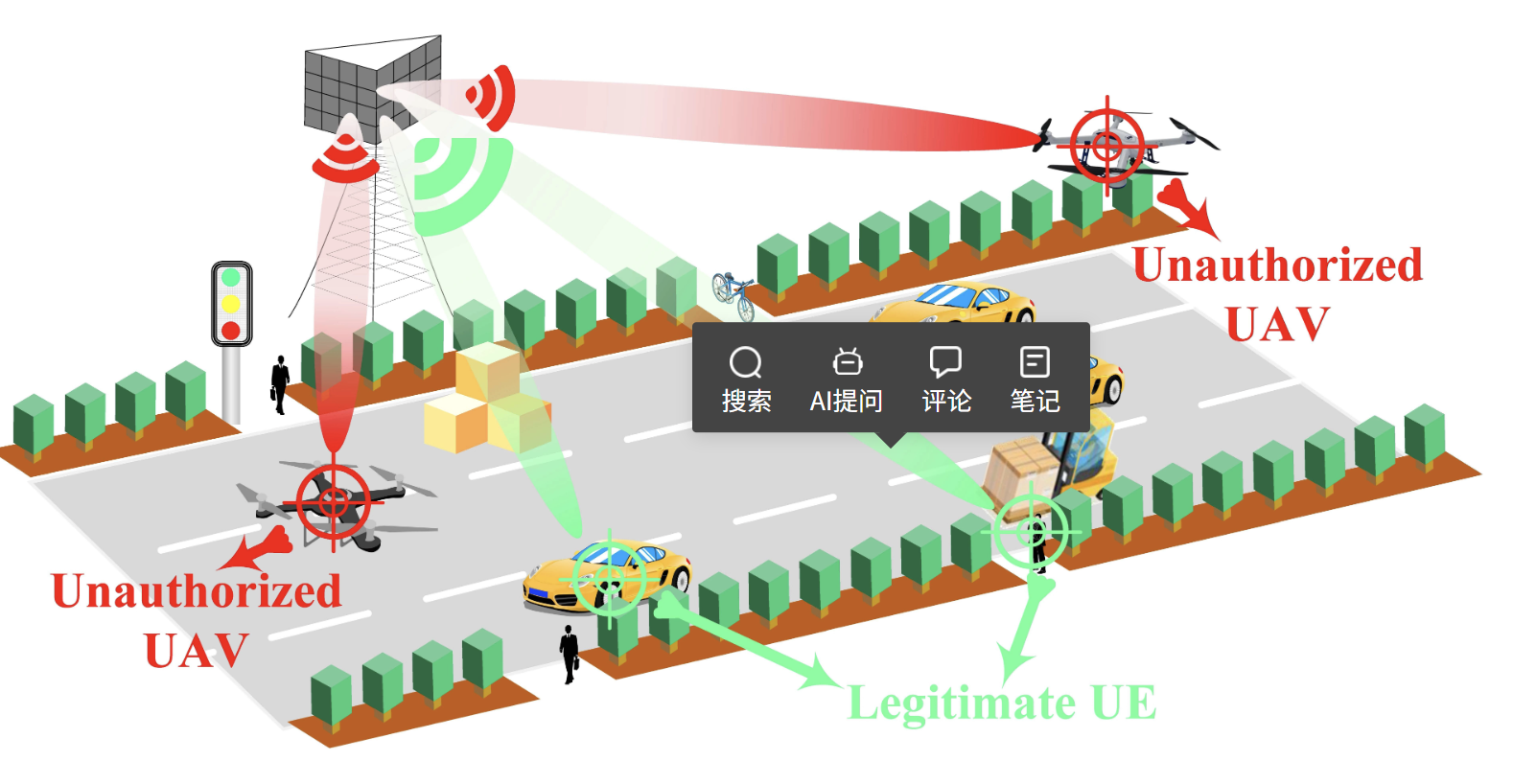
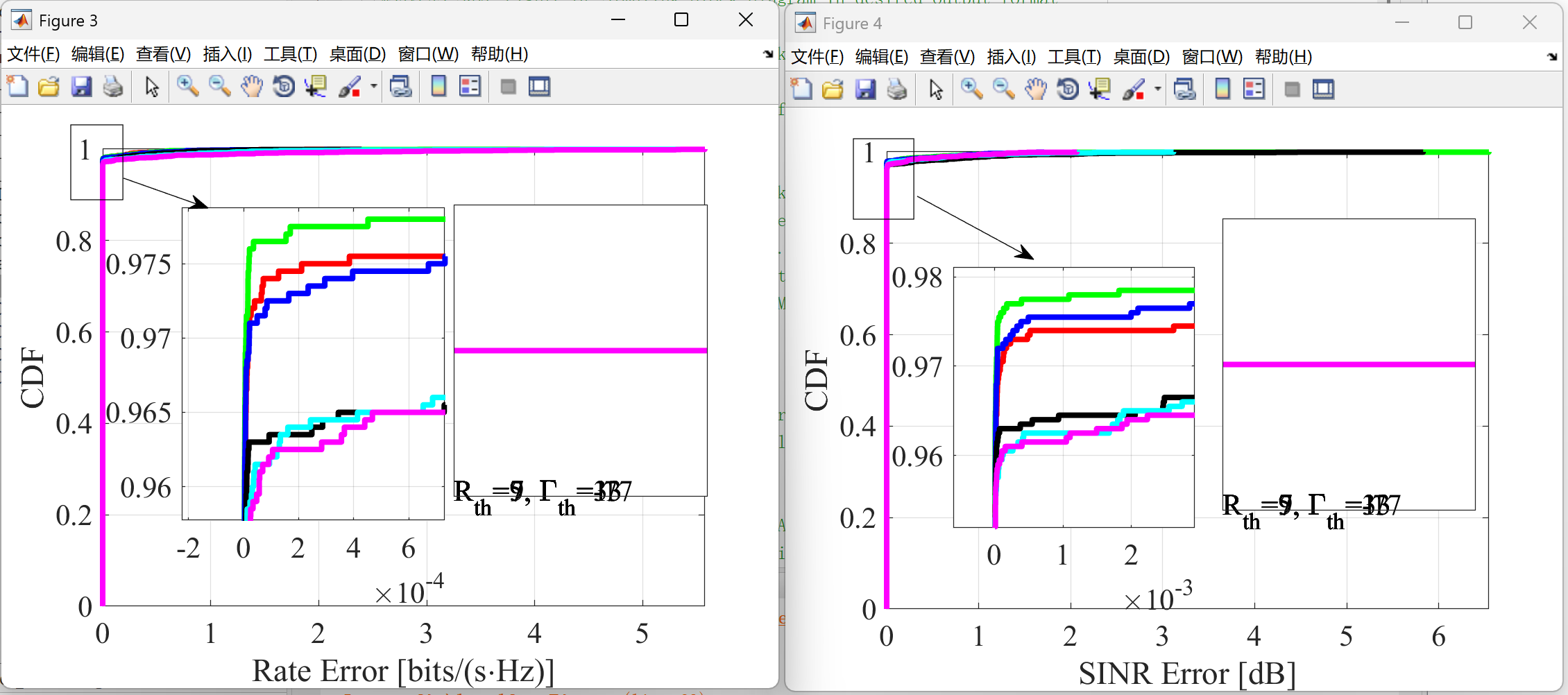
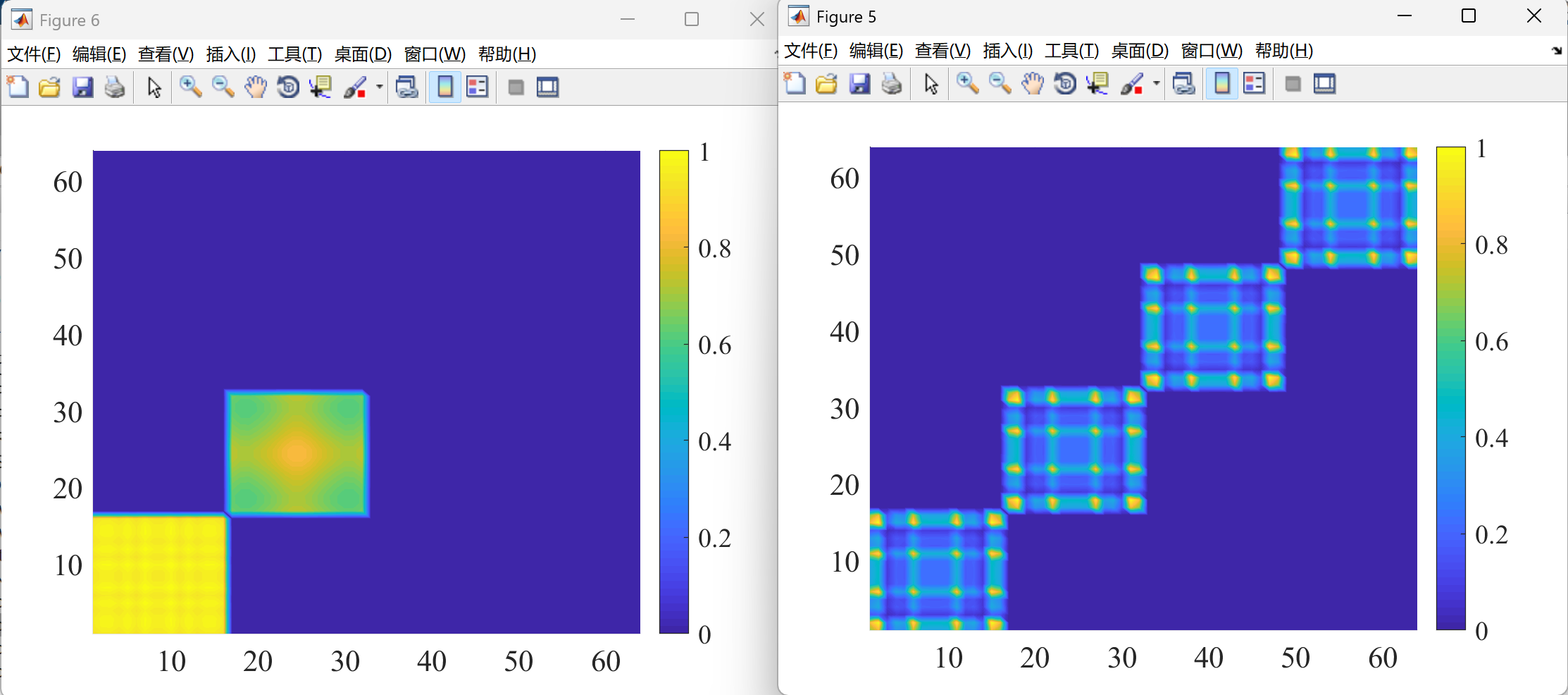
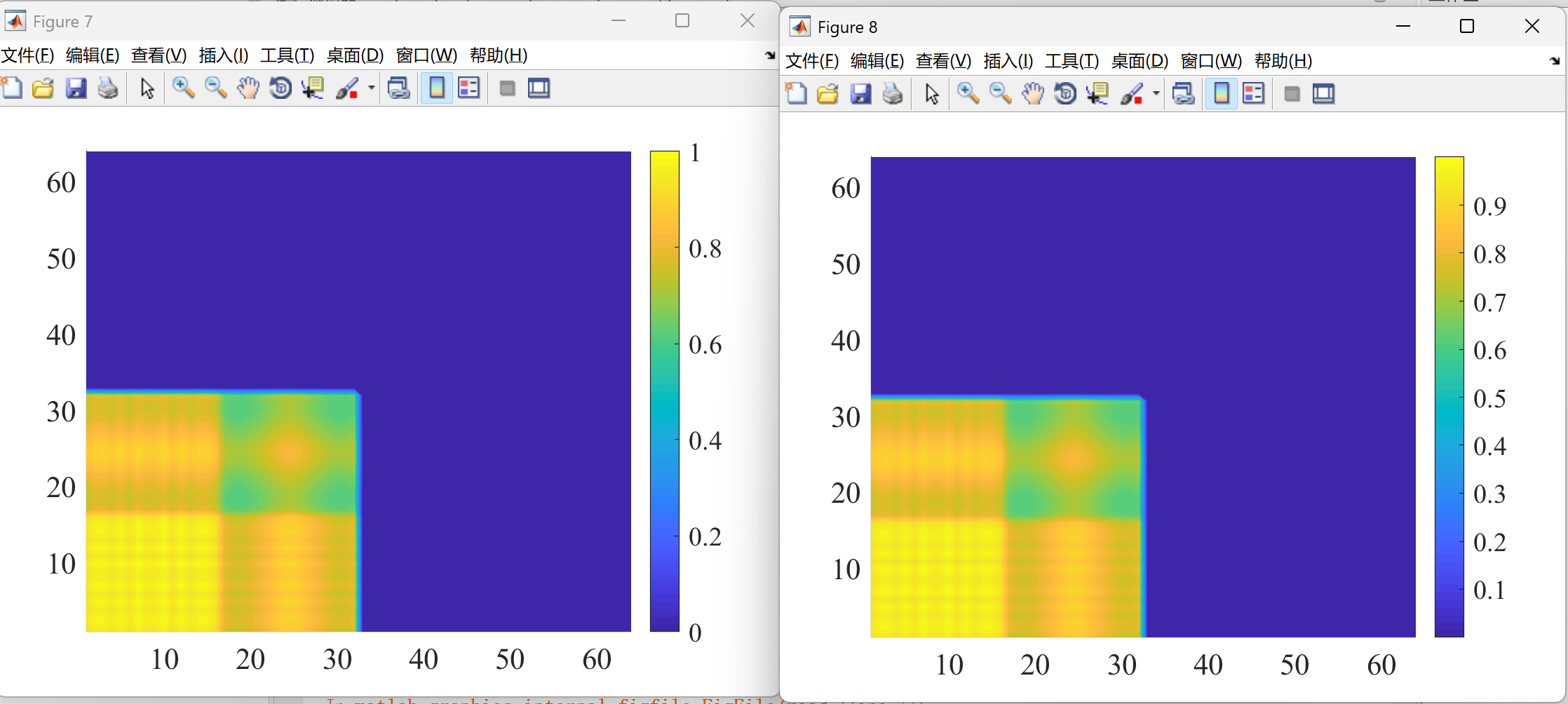
摘要——为保障低空经济的蓬勃发展,对抗未授权无人机(UAV)是一项关键任务。现有广泛部署的基站具备同时实现通信与干扰的巨大潜力。基于此,本文提出在双功能多输入多输出(MIMO)蜂窝系统中,联合设计波束成形,以同时支持对合法用户的通信并对未授权无人机实施对抗。我们首先构建了一个通信与干扰联合(JCJ)优化问题,利用半正定松弛(SDR)将其松弛为可求解的半正定规划(SDP)形式,该松弛是简化复杂 JCJ 设计的关键步骤。尽管松弛后的 SDP 解无法直接应用于原问题,但其为后续精修提供了重要启发。因此,我们针对 SDP 问题的结构专门设计了一种新颖的约束,确保所得解满足原问题的秩-1 约束。仿真结果验证,当合法用户与未授权无人机总数超过天线数时,所提 JCJ 方案仍能高效运行。
关键词——低空经济;对抗;无人机;多输入多输出;通信与干扰联合
I. 引言
低空经济(LAE)被设想为一种整合多种低空有人/无人航空器(包括无人机与电动垂直起降 eVTOL 飞行器)经济活动的体系 [1]。其有望在交通、环境监测、农业、娱乐等众多领域催生丰富的低空服务,从而带来显著的经济与社会效益。这一潜力激发了大量研究兴趣 [2]–[6]。
要使 LAE 成功,一方面必须确保与授权无人机保持持续无线通信,另一方面还需对未授权无人机实施必要对抗措施 [7]、[8]。一般而言,对抗技术分为物理捕获与干扰两类 [9]。物理捕获方法高效且成本低廉,但对操作员不友好。干扰是消除闯入受限区域无人机最常用的手段,可细分为四类 [7]:
1) 发射类噪声非结构化信号,降低未授权无人机的信干噪比(SINR)。文献 [10] 利用部分频带噪声干扰切断无人机与其遥控器之间的控制链路。
2) 广播欺骗性全球定位系统(GPS)信号,使未授权无人机偏离受限空域。
3) 侵入未授权无人机通信协议并发送虚假指令,使其飞离受限区域 [11]–[14]。
4) 被动干扰,即利用无源器件改变环境信号,使多径信号在接收端破坏性叠加。一种常见做法是通过可重构智能表面(RIS)设计相位 [15]–[18]。
2. 低空经济对通信技术的核心需求
2.1 空域管理精细化需求
- 动态空域分类:需实现报告空域、监视空域与目视航线的实时动态划分,支持eVTOL在300-1000米低空的灵活航线规划。
- 冲突预警与避让:要求通信系统支持10毫秒级时延的ADS-B数据交互,实现无人机与有人机、建筑物间的实时避障。
2.2 规模化应用的安全保障
- 反制非法无人机:需在1公里范围内实现95%以上的非法无人机识别准确率,干扰响应时间小于0.5秒。
- 数据链路加密:采用国密SM9算法对飞行控制指令加密,防止信号劫持导致的坠机风险。
2.3 基础设施适配性挑战
- 起降点覆盖密度:需在长三角、粤港澳等城市群构建“15分钟低空交通圈”,要求起降点间距不超过5公里。
- 能源补给网络:eVTOL充电桩需支持30分钟快充至80%电量,通信模块功耗需降低至现有水平的40%。
3. MIMO蜂窝系统在低空通信中的创新应用
3.1 联合通信与干扰(JCJ)技术架构
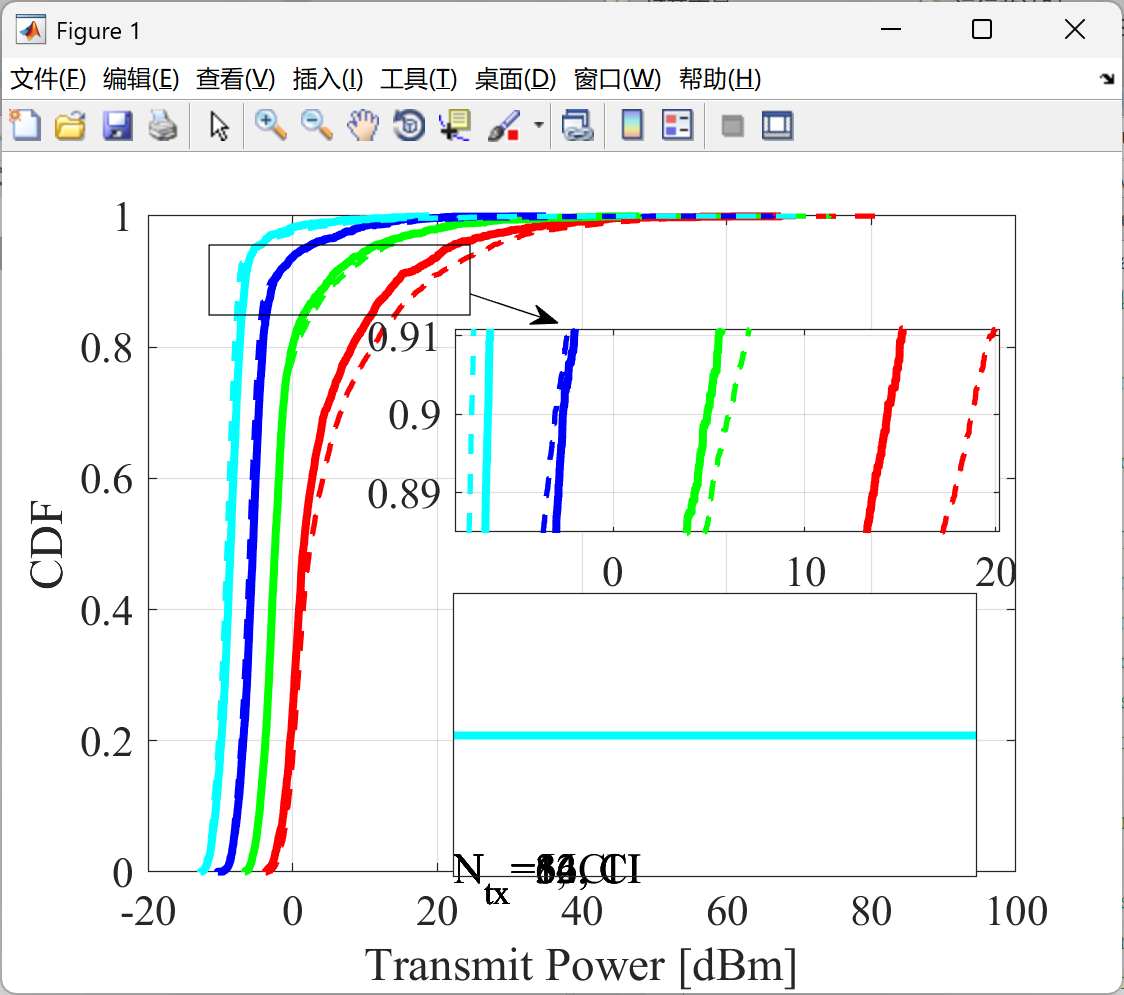
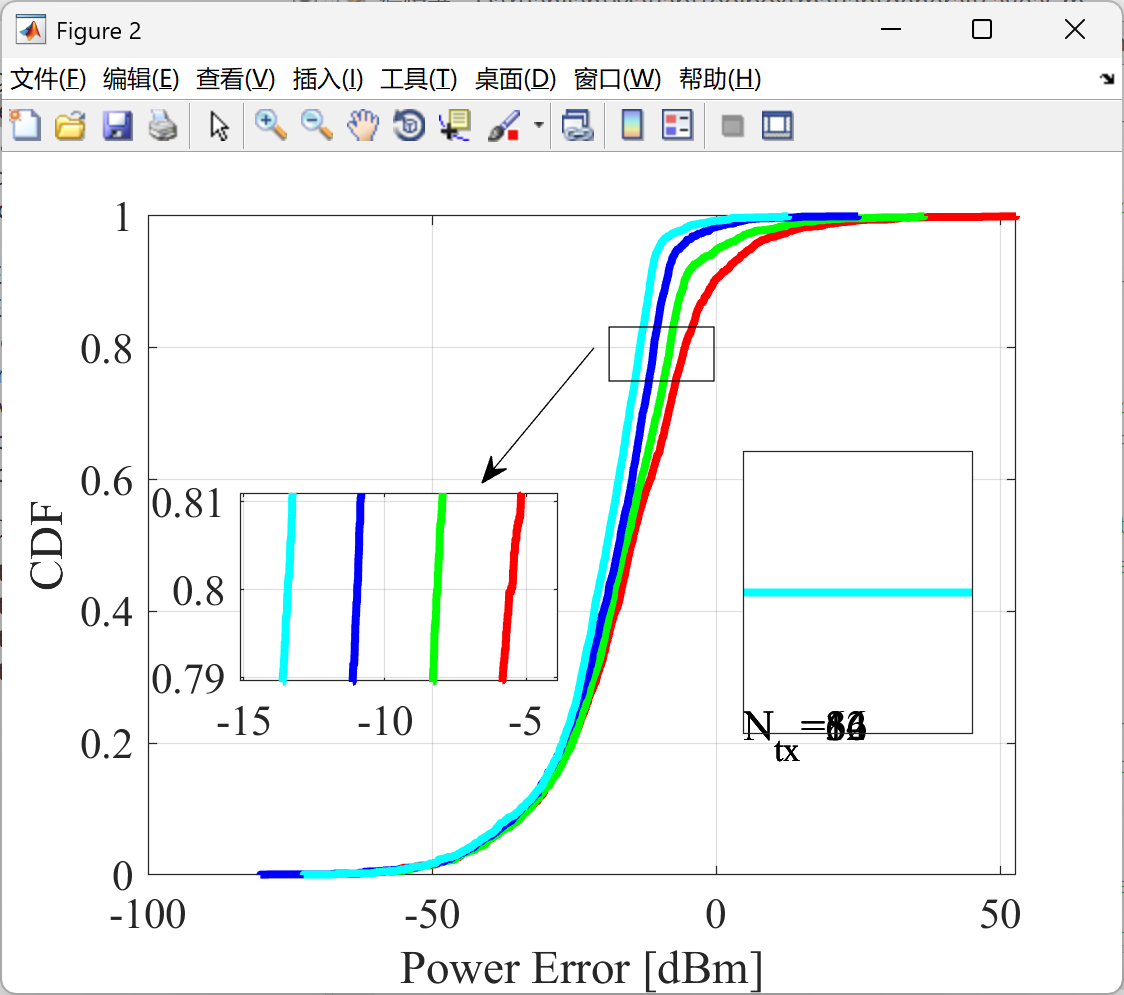
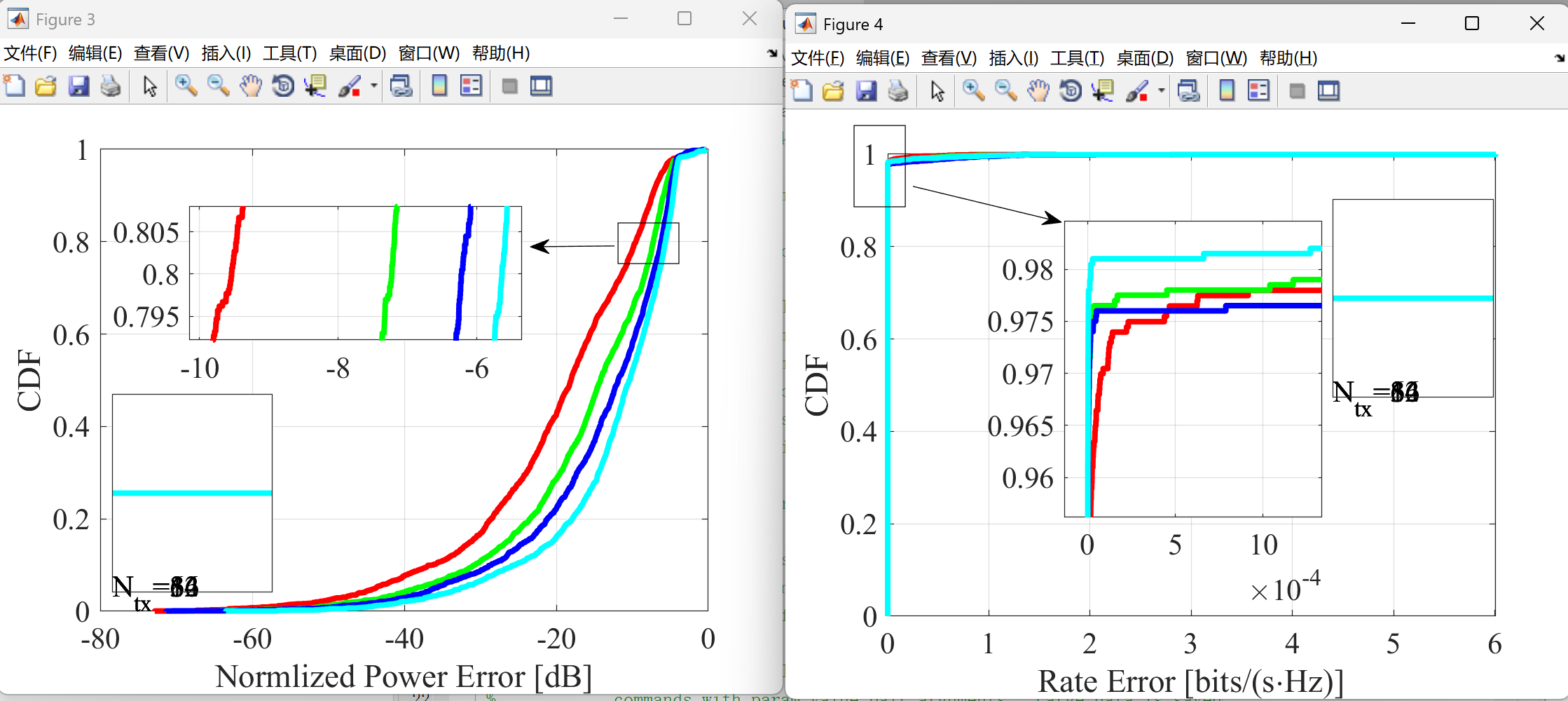
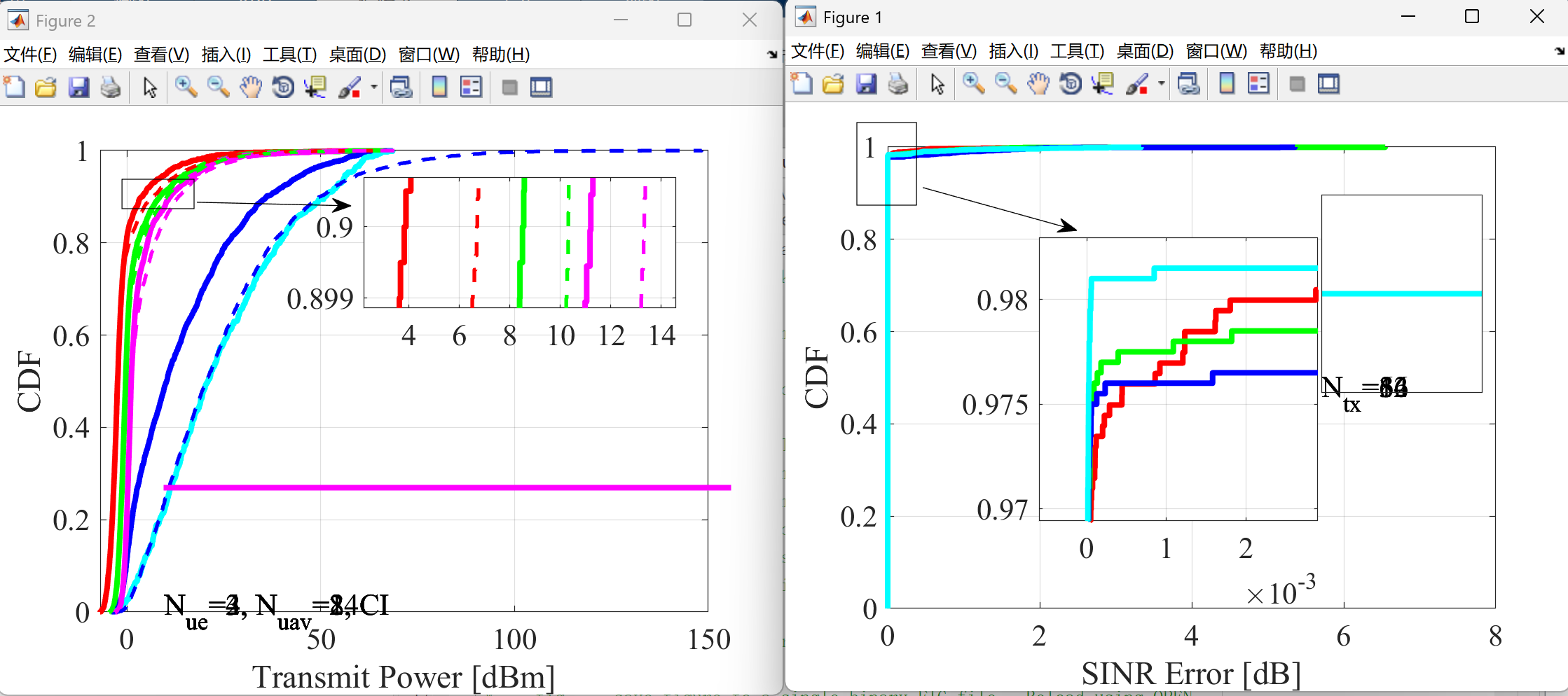
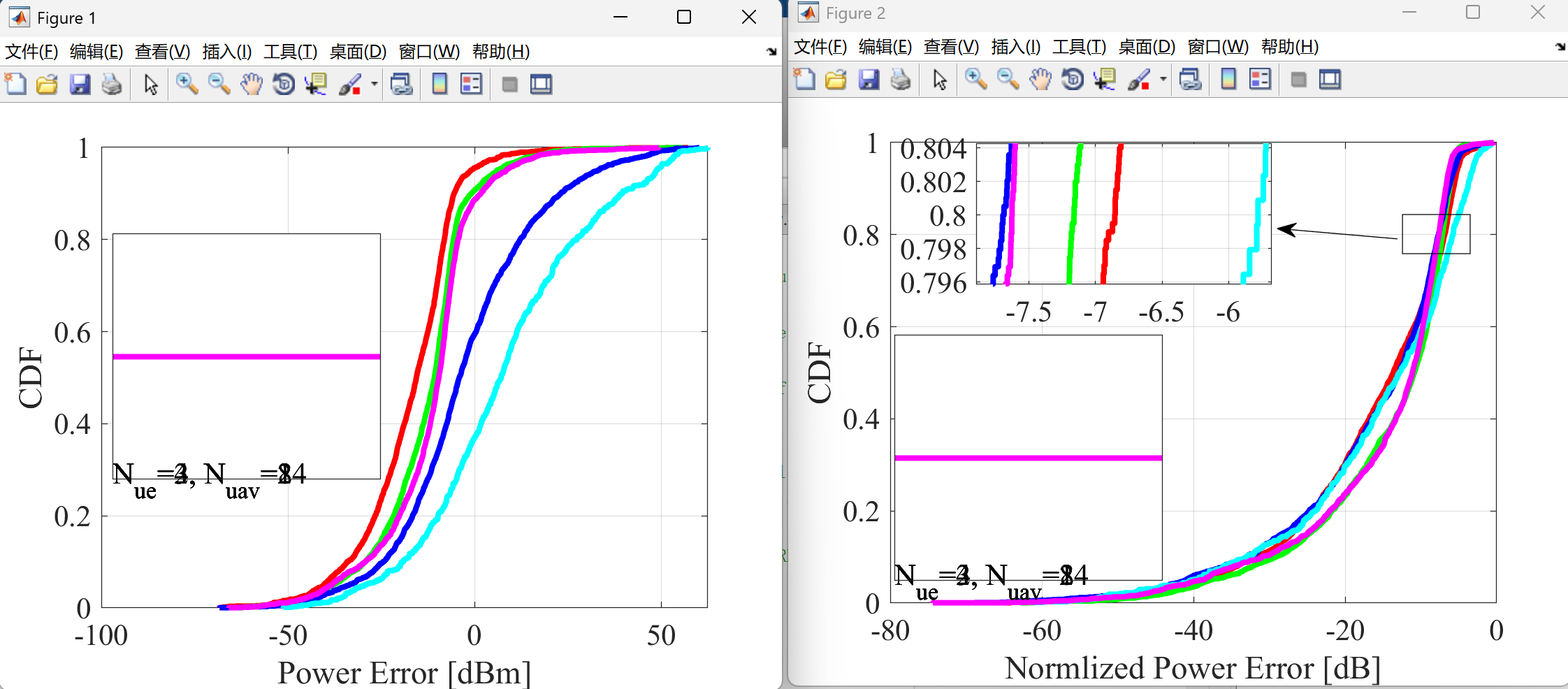
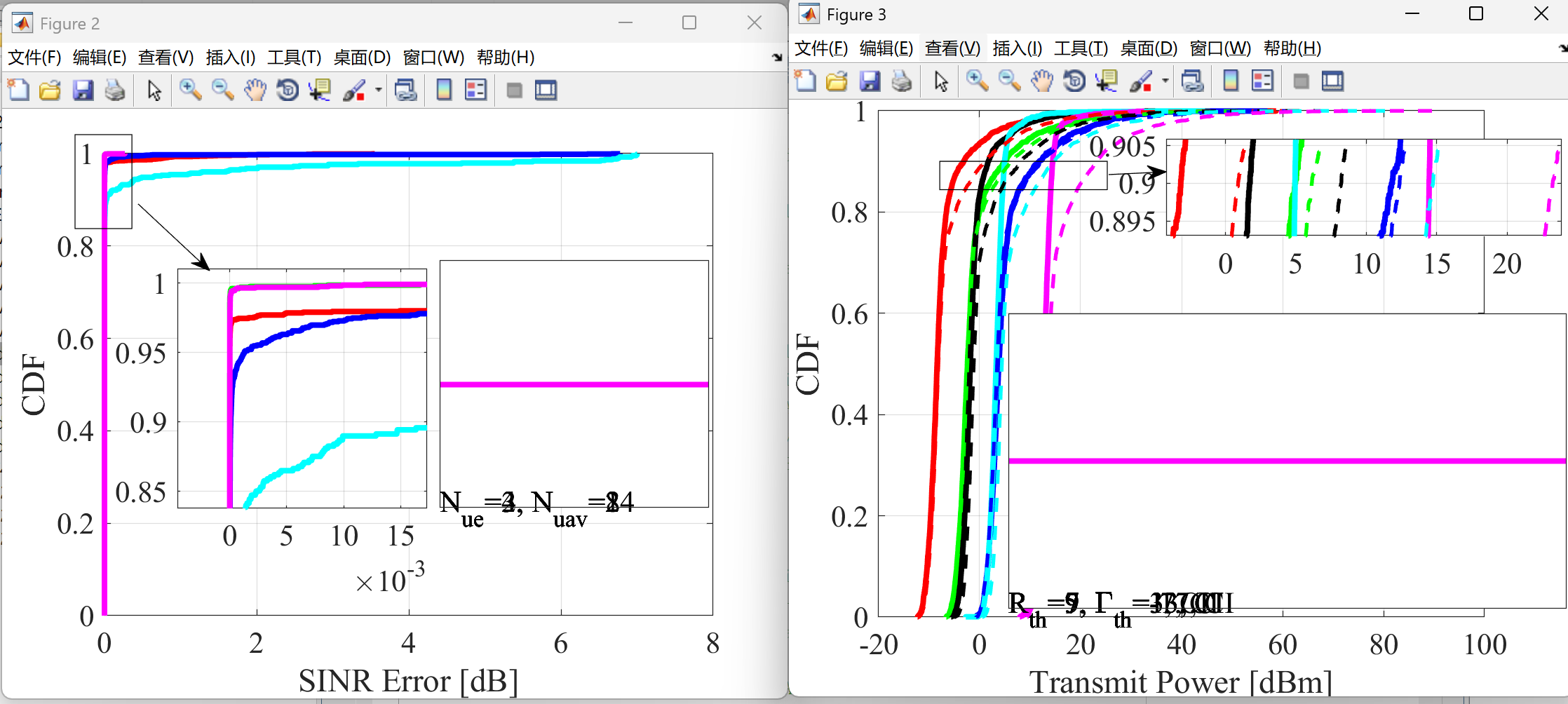
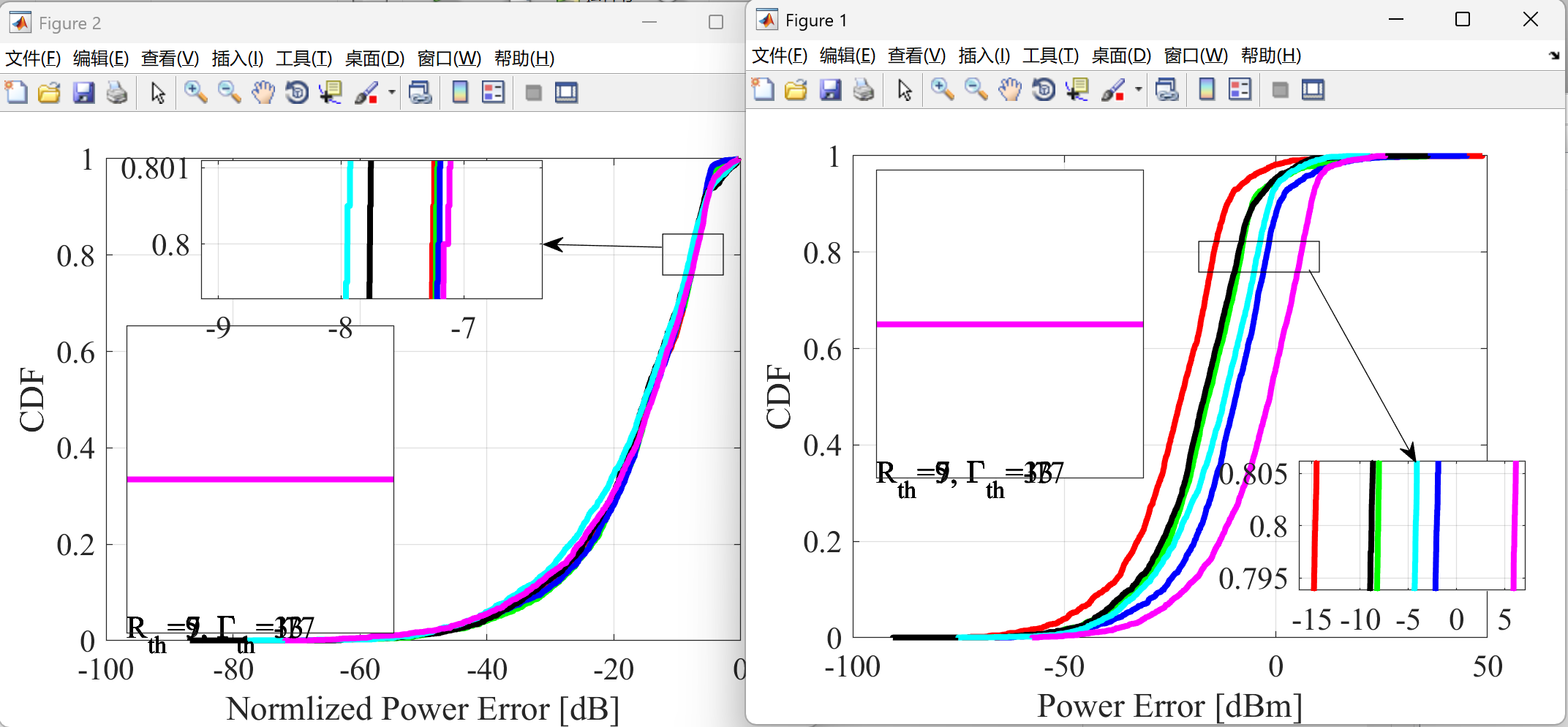
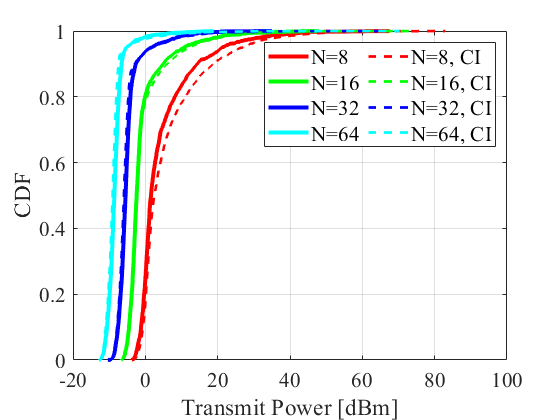
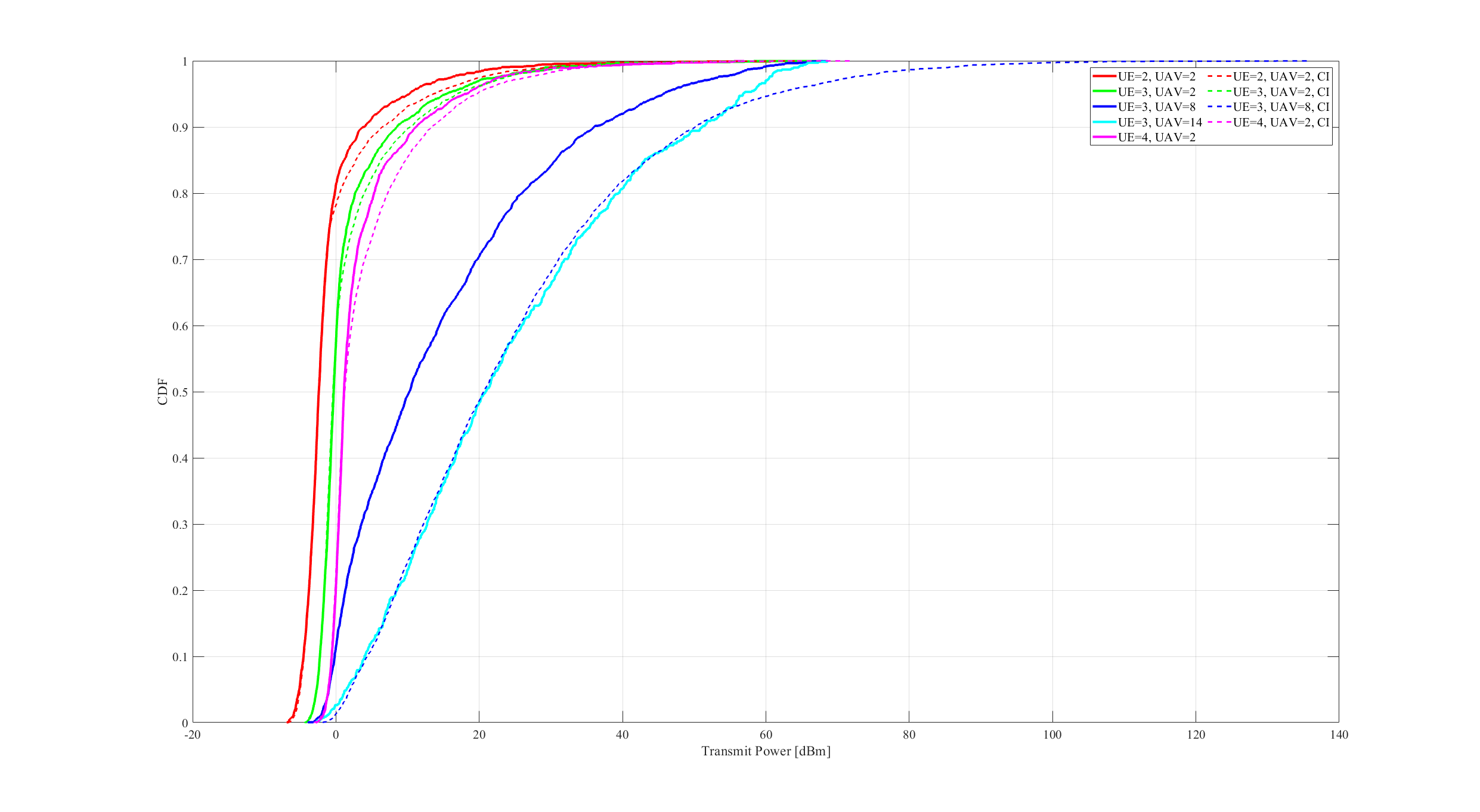
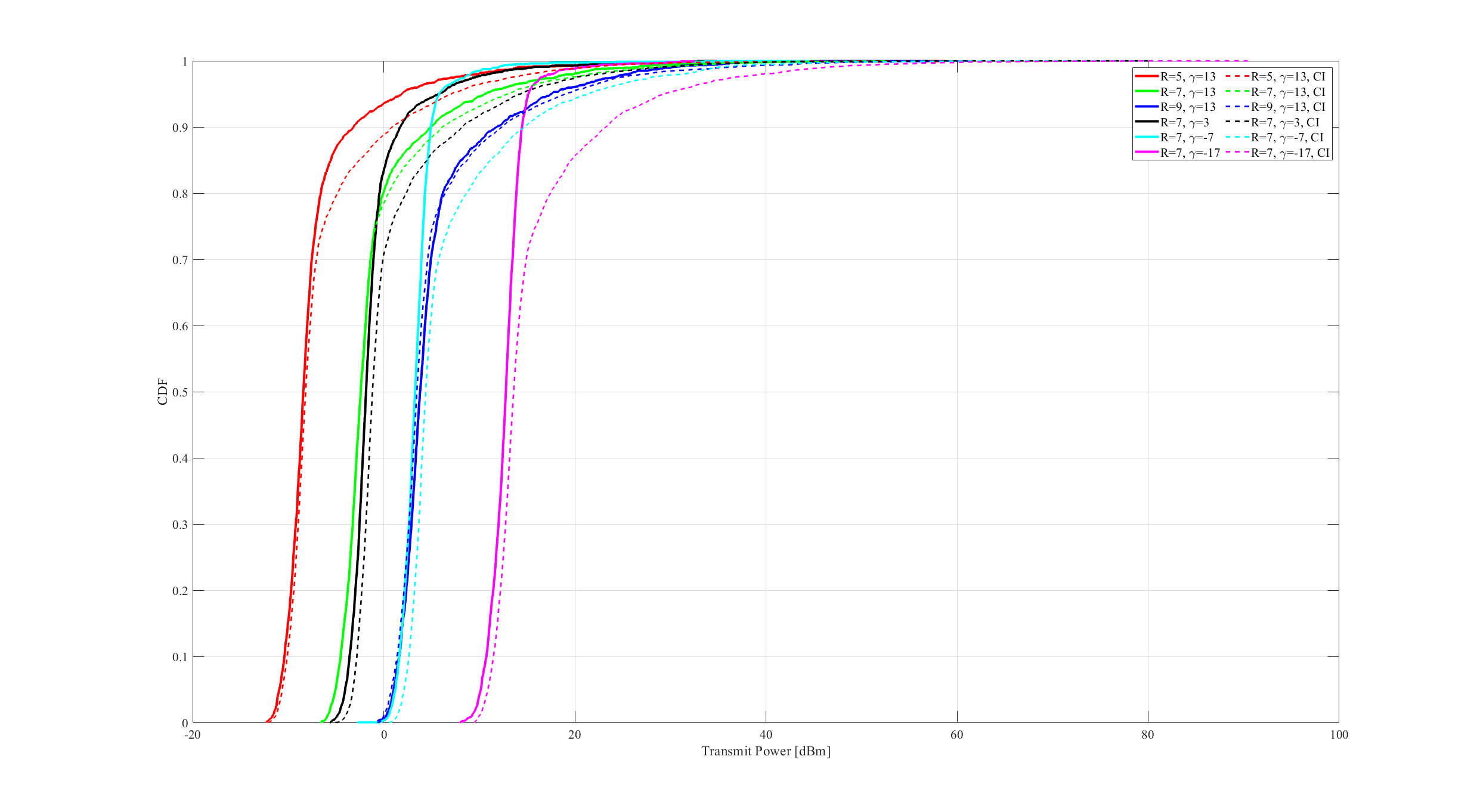
- 资源复用机制:通过半正定规划(SDP)优化基站天线波束赋形,实现合法用户通信与非法无人机干扰的频谱共享。实验表明,在16天线基站覆盖下,JCJ方案较传统信道反转(CI)方案降低发射功率32%,支持8架无人机同时反制。
- 动态干扰抑制:采用基于深度学习的导频污染检测算法,在复杂电磁环境中实现98.7%的干扰信号识别准确率,误码率(BER)较OFDM系统降低60%。
3.2 空地协同优化策略
- 分层航路规划:结合5G-A通感一体基站,构建三维电子围栏,实现eVTOL在120-300米、无人机在0-120米的分层飞行。杭州亚运会期间,该技术使空域冲突率下降至0.3次/万架次。
- 边缘计算赋能:在基站侧部署轻量化AI模型,实现飞行数据实时处理。测试显示,边缘节点可将视频传输时延从200毫秒压缩至50毫秒,支持4K/60fps高清图传。
4. 政策与产业协同实施路径
4.1 空域管理改革深化
- 试点推广经验:借鉴江西“赣鄱空中走廊”模式,在长江经济带、粤港澳大湾区划设低空文旅专用航路,允许eVTOL以200公里/小时速度巡航。
- 法规标准完善:加快制定《低空航行服务保障体系建设指南》,明确MIMO基站部署间距(城市核心区≤1公里)、通信频段(1.4GHz专网优先)等参数。
4.2 基础设施共建共享
- 起降点网络建设:采用“交通枢纽+分布式节点”布局,在长三角规划200个Vertiport(垂直起降场),配套智能充电桩与毫米波通信终端。
- 频谱资源统筹:建立低空频谱动态分配平台,允许运营商通过拍卖方式获取700MHz、2.4GHz等频段使用权,避免民用与警用频段冲突。
4.3 产业生态协同创新
- 适航审定加速:针对eVTOL电池能量密度(当前285Wh/kg→目标400Wh/kg)、冗余系统等关键指标,建立“一事一议”与标准审定相结合的认证流程,将取证周期缩短至12个月。
- 应用场景拓展:开发“共享航班”模式降低eVTOL观光票价,通过政府发放消费券补贴50%票价;在农业领域推广无人机集群播种,使单亩作业成本从15元降至8元。
5. 案例分析:海宁市低空治理实践
5.1 创新体制机制
- 成立政务航空领导小组,统筹公安、交通、环保等12个部门需求,建立“三网融合”专网(1.4GHz图传网+5G控制网+北斗定位网),实现无人机3分钟响应圈覆盖全域。
5.2 技术应用成效
- 部署MIMO基站48个,支持200架无人机同时作业,日均处理巡查数据1.2TB;通过AI技战法研发团队优化航线规划,使电力巡检效率提升3倍,年节约人力成本超2000万元。
6. 结论与展望
MIMO蜂窝系统通过JCJ技术、空地协同优化与政策产业协同,有效解决了低空经济规模化发展中的通信安全、空域冲突与基础设施瓶颈。未来研究需进一步探索6G太赫兹通信在低空场景的应用,以及区块链技术对飞行数据确权与共享的支持,为构建安全、高效、绿色的低空生态提供持续动力。
📚2 运行结果
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取

![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号