笔记:对抗训练及其在Bert中的应用
最近在打一个比赛,发现往年的优秀样例都添加了对抗训练和多模型融合,遂学习一下对抗训练,并在实际比赛中检验效果
对抗样本的基本概念
要认识对抗训练,首先要了解 "对抗样本",它首先出现在论文 Intriguing properties of neural networks 之中。简单来说,它是指对于人类来说 "看起来" 几乎一样,但对于模型来说预测结果却完全不一样的样本,比如下面的经典例子(一只熊猫加了点扰动就被识别成了长臂猿)

那么什么样的样本才是最好的对抗样本呢?
对抗样本一般需要具备两个特点:
- 相对于原始输入,所添加的扰动是微小的
- 能使模型犯错
对抗训练基本概念
GAN之父Goodfellow在15年的ICLR中第一次提出了对抗训练这个概念,简而言之,就是在原始输入样本 $x$ 上加上一个扰动 $\Delta x$ 得到对抗样本,再用其进行训练。
也就是说,这个问题可以抽象成这样一个模型:
$$\max _{\theta} P(y \mid x+\Delta x ; \theta)$$
其中,$y$ 是 ground truth, $\theta$ 是模型参数。意思就是即使在扰动的情况下求使得预测出 $y$ 的概率最大的参数 $\theta$.
那扰动 $\Delta x$ 是如何确定的呢?
GoodFellow认为:神经网络由于其线性的特点,很容易受到线性扰动的攻击。于是他提出了 Fast Gradinet Sign Method (FGSM),来计算输入样本的扰动。扰动可以被定义为
$$\Delta x=\epsilon \cdot \operatorname{sgn}\left(\nabla_{x} L(x, y ; \theta)\right)$$
其中,$sgn$ 为符号函数,$L$ 为损失函数(很多地方也用 $J$ 来表示)。GoodFellow发现 $\epsilon = 0.25$ 时,这个扰动能给一个单层分类器造成99.9%的错误率。这个扰动其实就是沿着梯度反方向走了 $\Delta x$
最后,GoodFellow还总结了对抗训练的两个作用:
1. 提高模型应对恶意对抗样本时的鲁棒性
2. 作为一种regularization,减少overfitting,提高泛化能力
Min-Max公式
Madry在2018年的ICLR论文 Towards Deep Learning Models Resistant to Adversarial Attacks 中总结了之前的工作。总的来说,对抗训练可以统一写成如下格式:
$$\min _{\theta} \mathbb{E}_{(x, y) \sim \mathcal{D}}\left[\max _{\Delta x \in \Omega} L(x+\Delta x, y ; \theta)\right]$$
其中 $\mathcal{D}$ 代表输入样本的分布,$x$ 代表输入,$y$ 代表标签,$\theta$ 是模型参数,$L(x+y; \theta)$ 是单个样本的loss,$\Delta x$ 是扰动,$\Omega$ 是扰动空间。这个式子可以分布理解如下:
1. 内部max是指往 $x$ 中添加扰动 $\Delta x$,$\Delta x$ 的目的是让 $L(x+\Delta x, y ; \theta)$ 越大越好,也就是说尽可能让现有模型预测出错。但是,$\Delta x$ 也是有约束的,要在 $\Omega$ 范围内. 常规的约束是 $|| \Delta x|| \leq \epsilon$,其中 $\epsilon$ 是一个常数
2. 外部min是指找到最鲁棒的参数 $\theta$ 是预测的分布符合原数据集的分布
这就解决了两个问题:如何构建足够强的对抗样本、和如何使得分布仍然尽可能接近原始分布
从CV到NLP
对于CV领域,图像可以认为是连续的,因此可以直接在原始图像上添加扰动;
而对于NLP,它的输入时文本,本质是one-hot,而两个one-hot之间的欧式距离恒为 $\sqrt{2}$,理论上不存在“微小的扰动”,
而且,在Embedding向量上加上微小扰动可能就找不到与之对应的词了,这就不是真正意义上的对抗样本了,因为对抗样本依旧能对应一个合理的原始输入
既然不能对Embedding向量添加扰动,可以对Embedding层添加扰动,使其产生更鲁棒的Embedding向量
Fast Gradient Method(FGM)
上面提到,Goodfellow 在 15 年的 ICLR 中提出了 Fast Gradient Sign Method(FGSM),随后,在 17 年的 ICLR 中,Goodfellow 对 FGSM 中计算扰动的部分做了一点简单的修改。假设输入文本序列的 Embedding vectors 为 $x$,Embedding层的扰动为:
\begin{aligned}
\Delta x &=\epsilon \cdot \frac{g}{\|g\|_{2}} \\
g &=\nabla_{x} L(x, y ; \theta)
\end{aligned}
实际上就是取消了符号函数,用二范式做了一个 scale,需要注意的是这里norm计算是针对一个sample,对梯度 $g$ 的后两维计算norm,为了方便,这里是对一个batch计算norm。其实除以norm本来就是一个放缩作用,影响不大。假设 $x$ 的维度是 $[batch\_size, len, embed_size]$,针对sample计算的norm是 $[batch\_size, 1, 1]$,针对整个batch计算的norm是 $[1, 1, 1]$。
class FGM(): def __init__(self, model): self.model = model self.backup = {} def attack(self, epsilon=1., emb_name='emb'): # emb_name这个参数要换成你模型中embedding的参数名 # 例如,self.emb = nn.Embedding(5000, 100) for name, param in self.model.named_parameters(): if param.requires_grad and emb_name in name: self.backup[name] = param.data.clone() norm = torch.norm(param.grad) # 默认为2范数 if norm != 0: r_at = epsilon * param.grad / norm param.data.add_(r_at) def restore(self, emb_name='emb'): # emb_name这个参数要换成你模型中embedding的参数名 for name, param in self.model.named_parameters(): if param.requires_grad and emb_name in name: assert name in self.backup param.data = self.backup[name] self.backup = {}
需要使用对抗训练的时候,只需要添加5行代码:
# 初始化 fgm = FGM(model) for batch_input, batch_label in data: # 正常训练 loss = model(batch_input, batch_label) loss.backward() # 反向传播,得到正常的grad # 对抗训练 fgm.attack() # embedding被修改了 # optimizer.zero_grad() # 如果不想累加梯度,就把这里的注释取消 loss_sum = model(batch_input, batch_label) loss_sum.backward() # 反向传播,在正常的grad基础上,累加对抗训练的梯度 fgm.restore() # 恢复Embedding的参数 # 梯度下降,更新参数 optimizer.step() optimizer.zero_grad()
Note: 不是把上面的正常训练换成对抗训练,而是两者都要,先正常训练再对抗训练
Projected Gradient Descent(PGD)
FGM 的思路是梯度上升,本质上来说没有什么问题,但是 FGM 简单粗暴的 "一步到位" 是不是有可能并不能走到约束内的最优点呢?当然是有可能的。于是,一个新的想法诞生了,Madry 在 18 年的 ICLR 中提出了 Projected Gradient Descent(PGD)方法,简单的说,就是 "小步走,多走几步",如果走出了扰动半径为 ϵ 的空间,就重新映射回 "球面" 上,以保证扰动不要过大:
\begin{aligned}
x_{t+1} &=\prod_{x+S}\left(x_{t}+\alpha \frac{g\left(x_{t}\right)}{\left\|g\left(x_{t}\right)\right\|_{2}}\right) \\
g\left(x_{t}\right) &=\nabla_{x} L\left(x_{t}, y ; \theta\right)
\end{aligned}
其中$S=\left\{r \in \mathbb{R}^{d}:\|r\|_{2} \leq \epsilon\right\}$ 为扰动的约束空间,$\alpha$ 是小步的步长
由于 PGD 理论和代码比较复杂,因此下面先给出伪代码方便理解,然后再给出代码
对于每个x: 1.计算x的前向loss,反向传播得到梯度并备份 对于每步t: 2.根据Embedding矩阵的梯度计算出r,并加到当前Embedding上,相当于x+r(超出范围则投影回epsilon内) 3.t不是最后一步: 将梯度归0,根据(1)的x+r计算前后向并得到梯度 4.t是最后一步: 恢复(1)的梯度,计算最后的x+r并将梯度累加到(1)上 5.将Embedding恢复为(1)时的值 6.根据(4)的梯度对参数进行更新
可以看到,在循环中 r 是逐渐累加的,要注意的是最后更新参数只使用最后一个 x+r 算出来的梯度
class PGD(): def __init__(self, model): self.model = model self.emb_backup = {} self.grad_backup = {} def attack(self, epsilon=1., alpha=0.3, emb_name='emb', is_first_attack=False): # emb_name这个参数要换成你模型中embedding的参数名 for name, param in self.model.named_parameters(): if param.requires_grad and emb_name in name: if is_first_attack: self.emb_backup[name] = param.data.clone() norm = torch.norm(param.grad) if norm != 0: r_at = alpha * param.grad / norm param.data.add_(r_at) param.data = self.project(name, param.data, epsilon) def restore(self, emb_name='emb'): # emb_name这个参数要换成你模型中embedding的参数名 for name, param in self.model.named_parameters(): if param.requires_grad and emb_name in name: assert name in self.emb_backup param.data = self.emb_backup[name] self.emb_backup = {} def project(self, param_name, param_data, epsilon): r = param_data - self.emb_backup[param_name] if torch.norm(r) > epsilon: r = epsilon * r / torch.norm(r) return self.emb_backup[param_name] + r def backup_grad(self): for name, param in self.model.named_parameters(): if param.requires_grad: self.grad_backup[name] = param.grad.clone() def restore_grad(self): for name, param in self.model.named_parameters(): if param.requires_grad: param.grad = self.grad_backup[name]
使用的时候要麻烦一点:
pgd = PGD(model) K = 3 for batch_input, batch_label in data: # 正常训练 loss = model(batch_input, batch_label) loss.backward() # 反向传播,得到正常的grad pgd.backup_grad() # 保存正常的grad # 对抗训练 for t in range(K): pgd.attack(is_first_attack=(t==0)) # 在embedding上添加对抗扰动, first attack时备份param.data if t != K-1: optimizer.zero_grad() else: pgd.restore_grad() # 恢复正常的grad loss_sum = model(batch_input, batch_label) loss_sum.backward() # 反向传播,并在正常的grad基础上,累加对抗训练的梯度 pgd.restore() # 恢复embedding参数 # 梯度下降,更新参数 optimizer.step() optimizer.zero_grad()
Virtual Adversarial Training
除了监督任务,对抗训练还可以用在半监督任务中,尤其对于 NLP 任务来说,很多时候我们拥有大量的未标注文本,那么就可以参考 Distributional Smoothing with Virtual Adversarial Training 进行半监督训练
首先,抽取一个随机标准正态扰动 $\left(d \sim \mathcal{N}(0,1) \in \mathbb{R}^{d}\right)$,加到Embedding上,并用KL散度计算梯度:
\begin{aligned}
g &=\nabla_{x^{\prime}} D_{K L}\left(p(\cdot \mid x ; \theta)|| p\left(\cdot \mid x^{\prime} ; \theta\right)\right) \\
x^{\prime} &=x+\xi d
\end{aligned}
然后,用得到的梯度,计算对抗扰动,并进行对抗训练:
\begin{aligned}
&\min _{\theta} D_{K L}\left(p(\cdot \mid x ; \theta)|| p\left(\cdot \mid x^{*} ; \theta\right)\right) \\
&x^{*}=x+\epsilon \frac{g}{\|g\|_{2}}
\end{aligned}
实现起来有很多细节,并且笔者对于 NLP 的半监督任务了解并不多,因此这里就不给出实现了
实验对照
为了说明对抗训练的作用,网上有位大佬选了四个 GLUE 中的任务进行了对照试验,实验代码使用的 Huggingface 的 transformers/examples/run_glue.py,超参都是默认的,对抗训练用的也是相同的超参
| 任务 | Metrics | BERT-Base | FGM | PGD |
|---|---|---|---|---|
| MRPC | Accuracy | 83.6 | 86.8 | 85.8 |
| CoLA | Matthew's corr | 56.0 | 56.0 | 56.8 |
| STS-B | Person/Spearmean corr | 89.3/88.8 | 89.3/88.8 | 89.3/88.8 |
| RTE | Accuracy | 64.3 | 66.8 | 64.6 |
可以看出,对抗训练还是有效的,在 MRPC 和 RTE 任务上甚至可以提高三四个百分点。不过,根据我们使用的经验来看,是否有效有时也取决于数据集
为什么对抗训练有效
Adversarial Training 能够提升 Word Embedding 质量的一个原因是:
有些词与比如(good 和 bad),其在语句中 Grammatical Role 是相近的,我理解为词性相同(都是形容词),并且周围一并出现的词语也是相近的,比如我们经常用来修饰天气或者一天的情况(The weather is good/bad; It's a good/bad day),这些词的 Word Embedding 是非常相近的。文章中用 Good 和 Bad 作为例子,找出了其最接近的 10 个词:
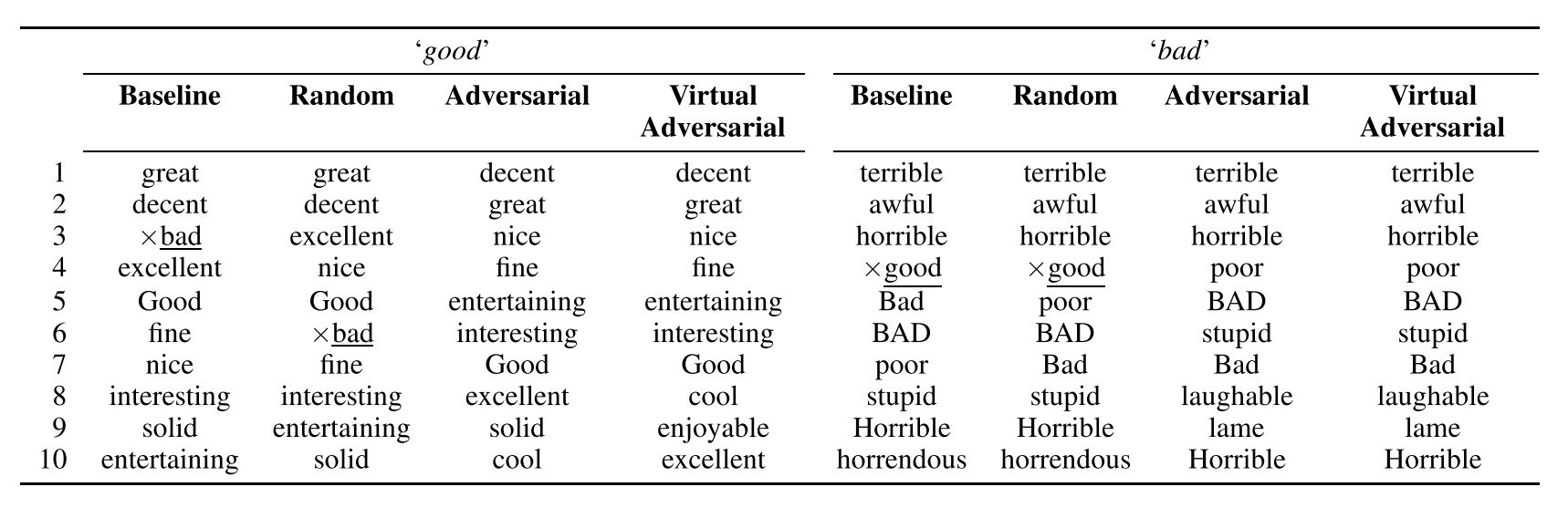
可以发现在 Baseline 和 Random 的情况下,good 和 bad 出现在了彼此的邻近词中,而喂给模型经过扰动之后的 X-adv 之后,也就是 Adversarial 这一列,这种现象就没有出现,事实上, good 掉到了 bad 接近程度排第 36 的位置
我们可以猜测,在 Word Embedding 上添加的 Perturbation 很可能会导致原来的 good 变成 bad,导致分类错误,计算的 Adversarial Loss 很大,而计算 Adversarial Loss 的部分是不参与梯度计算的,也就是说,模型(LSTM 和最后的 Dense Layer)的 Weight 和 Bias 的改变并不会影响 Adversarial Loss,模型只能通过改变 Word Embedding Weight 来努力降低它,进而如文章所说:
Adversarial training ensures that the meaning of a sentence cannot be inverted via a small change, so these words with similar grammatical role but different meaning become separated.
这些含义不同而语言结构角色类似的词能够通过这种 Adversarial Training 的方法而被分离开,从而提升了 Word Embedding 的质量,帮助模型取得了非常好的表现
梯度惩罚
这一部分,我们从另一个视角对上述结果进行分析,从而推出对抗训练的另一种方法,并且得到一种关于对抗训练更直观的几何理解
假设已经得到对抗扰动 $\Delta x$,更新 $\theta$ 时,对 $L$ 进行泰勒展开:
\begin{aligned}
\min _{\theta} \mathbb{E}_{(x, y) \sim D}[L(x+\Delta x, y ; \theta)] & \approx \min _{\theta} \mathbb{E}_{(x, y) \sim D}\left[L(x, y ; \theta)+<\nabla_{x} L(x, y ; \theta), \Delta x>\right] \\
&=\min _{\theta} \mathbb{E}_{(x, y) \sim D}\left[L(x, y ; \theta)+\nabla_{x} L(x, y ; \theta) \cdot \Delta x\right] \\
&=\min _{\theta} \mathbb{E}_{(x, y) \sim D}\left[L(x, y ; \theta)+\nabla_{x} L(x, y ; \theta)^{T} \Delta x\right]
\end{aligned}
对应的 $\theta$ 的梯度为:
$$\nabla_{\theta} L(x, y ; \theta)+\nabla_{\theta} \nabla_{x} L(x, y ; \theta)^{T} \Delta x$$
将 $\Delta x=\epsilon \nabla_{x} L(x, y ; \theta)$ 代入:
\begin{aligned}
&\nabla_{\theta} L(x, y ; \theta)+\epsilon \nabla_{\theta} \nabla_{x} L(x, y ; \theta)^{T} \nabla_{x} L(x, y ; \theta) \\
&=\nabla_{\theta}\left(L(x, y ; \theta)+\frac{1}{2} \epsilon\left\|\nabla_{x} L(x, y ; \theta)\right\|^{2}\right)
\end{aligned}
这个结果表示,对输入样本添加 $\epsilon \nabla x L(x, y ; \theta)$ 的对抗扰动,一定程度上等价于往loss中加“梯度惩罚”
$$\frac{1}{2} \epsilon\left\|\nabla_{x} L(x, y ; \theta)\right\|^{2}$$
如果对抗扰动是 $\epsilon\|\nabla x L(x, y ; \theta)\|$,那么对应的梯度惩罚项是 $\epsilon\|\nabla x L(x, y ; \theta)\|$ (少了个1/2,也少了个2次方)。
几何解释
事实上,关于梯度惩罚,我们有一个非常直观的几何图像。以常规的分类问题为例,假设有n个类别,那么模型相当于挖了n个坑,然后让同类的样本放到同一个坑里边去:
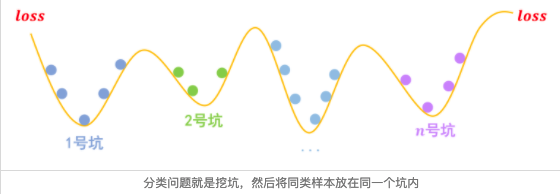
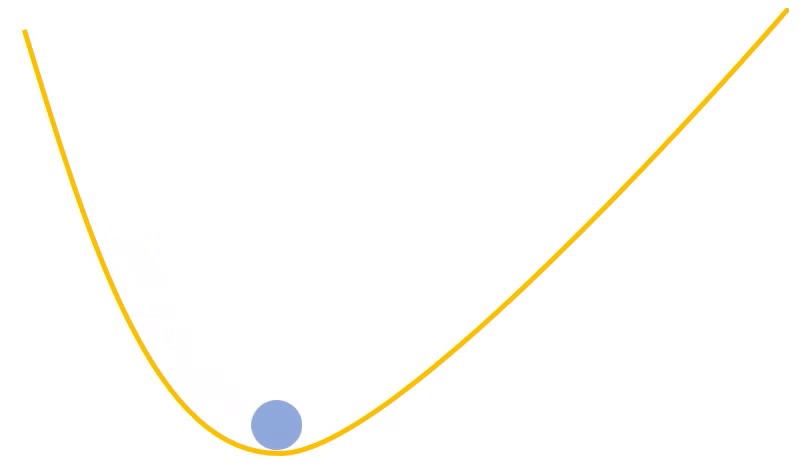
梯度惩罚则说“同类样本不仅要放在同一个坑内,还要放在坑底”,这就要求每个坑的内部要长这样:

为什么要在坑底呢?因为物理学告诉我们,坑底最稳定呀,所以就越不容易受干扰呀,这不就是对抗训练的目的么?
那坑底意味着什么呢?极小值点呀,导数(梯度)为零呀,所以不就是希望 $‖∇xL(x,y;θ)‖‖∇xL(x,y;θ)‖$ 越小越好么?这便是梯度惩罚的几何意义了。
验证部分
将对抗训练加到项目中, 出了点小问题,待修改
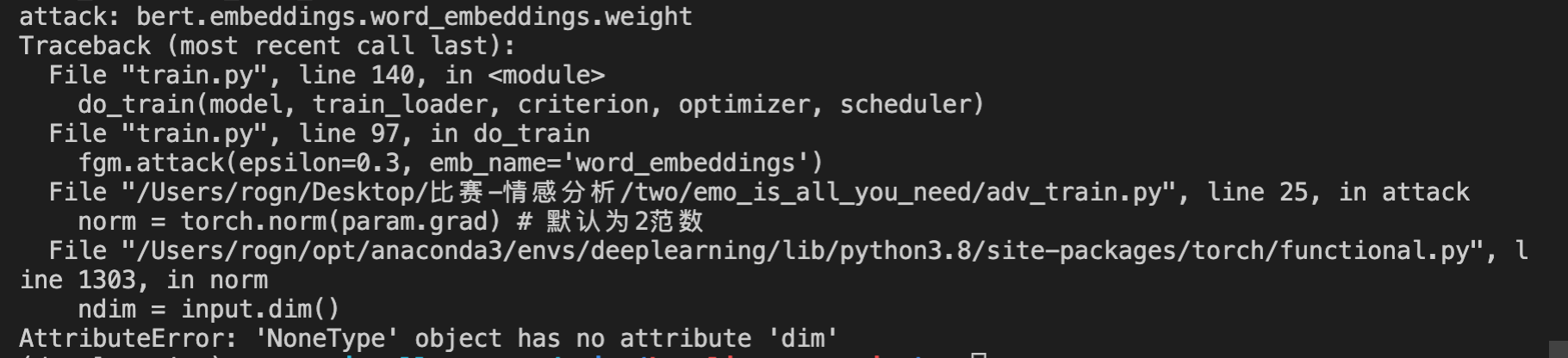
不知道为啥grad=None??
参考链接:
https://wmathor.com/index.php/archives/1537/
https://coding-zuo.github.io/2021/04/07/nlp中的对抗训练-与bert结合/
https://zhuanlan.zhihu.com/p/91269728
论文:
Adversarial Training for Aspect-Based Sentiment Analysis with BERT
FGSM: Explaining and Harnessing Adversarial Examples
FGM: Adversarial Training Methods for Semi-Supervised Text Classification
FreeAT: Adversarial Training for Free!
YOPO: You Only Propagate Once: Accelerating Adversarial Training via Maximal Principle
FreeLB: Enhanced Adversarial Training for Language Understanding
SMART: Robust and Efficient Fine-Tuning for Pre-trained Natural
代码
https://blog.csdn.net/weixin_42001089/article/details/115458615
https://github.com/bojone/keras_adversarial_training
https://github.com/bojone/bert4keras/blob/master/examples/task_iflytek_adversarial_training.py

 浙公网安备 33010602011771号
浙公网安备 33010602011771号