
论文阅读之PointNet++
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
PointNet++是PointNet的延续,或者说是PointNet的改进。PointNet使用shared mlp单独地处理每个点并使用max pooling进行特征的聚合,能够处理点云的无序性。但是PointNet没有提取点云的局部特征,这里的局部特征不是指一个点的特征,而是一个邻域。在卷积神经网络处理图像时,通过使用一定大小的卷积核对图像进行卷积操作,而卷积核的大小对应的图像区域就是一个局部区域,通过多级结构,不断增加感受野。因此PointNet++尝试提取点云的局部特征,并通过多级网络结构,产生高层次的特征。
那么问题来了,点云数据不像图像数据,图像数据是一个规则的网格结构,而点云是一个不规则的点集,具有无序性。因此,如何对点云进行局部区域的划分,以及如何对局部区域进行特征提取就是本文的重点。
邻域划分
对于如何划分邻域,本文给出的方案是对原始点云进行降采样得出一系列的点,以这些点为中心,以固定大小的半径定义一个球邻域,在球领域内的点即为一个局部区域。给定一个含有 \(N\) 个点的点云,邻域划分分为以下两步:
- 降采样:降采样使用FPS算法,FPS即最远点采样,第一个点从点云中随机选取,第二个点选剩下的点中距离第一个点最远的点,第三个点选剩下的点云中距离前两个点最近的点,依此类推。经过降采样,得到 \(N^{'}\) 个点,这\(N^{'}\)个点就是局部邻域的中心。
- 球查询:对于降采样得到的\(N^{'}\)点的每个点,我们把它们当作球心,即有\(N^{'}\)个球心,然后给定一个半径\(r\),定义出\(N^{'}\)个球。每个球中所包含的点即为该邻域内的所有点。在实现时,通常会给定一个上限值\(k\)。当然,这里需要注意的是,每个球邻域找出来之后,需要用球邻域的点减去中心点,转换成局部坐标。
假设点云中每个点的坐标为\(d\)维(\(d = 3\)),其额外的特征为\(C\)维(法向量、RGB等)。那么经过一次邻域划分,由原来的\(N \times \left(d + C\right)\)得到\(N^{'} \times \left(d + C\right)\)。
邻域特征提取
经过邻域划分得到每个球邻域内的点云仍然是无序的,为了提取一个邻域的特征,自然而然想到的是PointNet。对于\(N^{'}\)个邻域,使用同一个PointNet进行特征提取,得到\(N^{'} \times (d + C^{'})\)。\(d\)代表邻域中新的坐标的维度,\(C^{'}\)则代表了通过shared mlp将\(d+C\)维度提升到\(C^{'}\)。
以上两个步骤组成了网络中的一层特征提取。下面给出网络整体结构:
网络结构
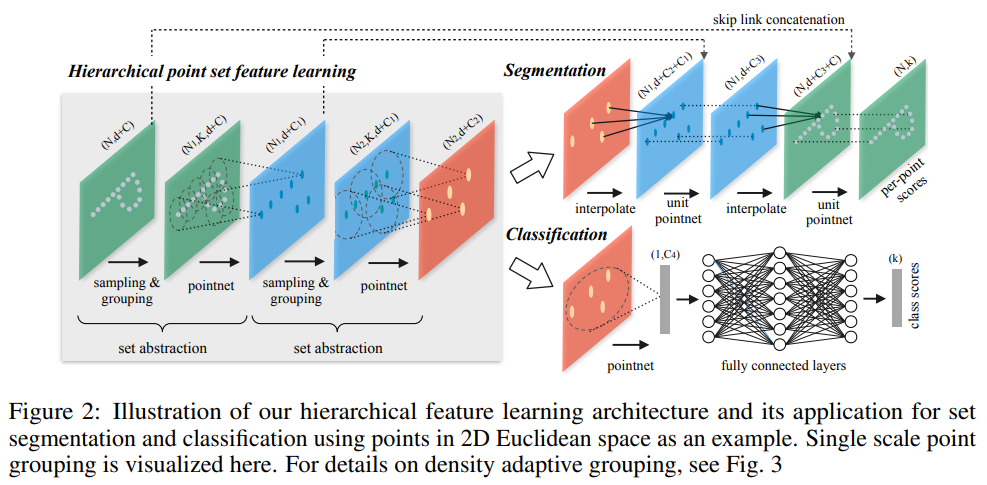
网络中,一个set abstraction层包括FPS降采样、球查询以及使用PointNet对邻域特征进行提取。每一层在上一层的结果基础之上,再进行FPS降采样、球查询、PointNet特征提取,每经过一个set abstraction点的数量都会减少一次。
对于分类任务而言,在最后需要进行一个全局的set abstraction,也就是以\(\left(0, 0, 0\right)\)为中心,所有剩下的点为一个球邻域,使用一个PointNet进行全局特征提取,得到一个\(1 \times C_4\)的全局特征,然后送入MLP中进行分类。
而对于分割任务而言,由于每次set abstraction操作使得点的数目变少了,最后的分割任务无法进行。因此需要将点数恢复到原来的点云数目,因此需要进行插值操作。假设第\(l-1\)层有\(N^{l-1}\)个点,即\(N^{l-1} \times \left(d + C^{l - 1}\right)\),经过set abstraction之后得到第\(l\)层有\(N^{l}\)个点, 即\(N^{l} \times (d + C^{l})\),且\(N^{l} < N^{l - 1}\)。插值的具体操作就是将第\(l-1\)层的每个点作为插值后的点,其特征需要在第\(l\)层寻找最近的\(k\)个点(\(k=3\))的特征的一个加权平均,而权重就是点的距离的\(p\)次方的倒数(\(p=2\))。
点云密度的鲁棒性问题
点云在每个区域的点的密度是不一样的。有的地方稀疏,有的地方密集。因此对于球查询时的半径选择十分重要。类比到卷积神经网络,卷积核的大小通常选取较小的卷积核如3x3或5x5,但是在点云中,小的邻域半径肯能因为稀疏性的问题使得领域内只有中心点一个点,因此局部邻域太小,根本不足以代表局部。
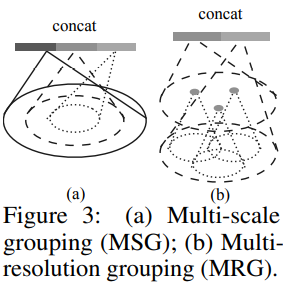
为了解决该问题,论文中给出了两种方案:MSG(multi-scale grouping)和MRG(Multi-resolution grouping)。
-
MSG
MSG在每次球查询时使用不同大小的半径,这就是所谓的多尺度multi-scale。对于每个尺度,都对应一个PointNet,也就是说有几个尺度,就有几个不同的PointNet。而在SSG中,只给定了一个尺度大小的半径,因此对所有的邻域只是用一个PointNet进行特征提取。
多尺度的特征提取后,每个尺度得到的特征的channel数是不一样的,但是特征数量是一样的,MSG直接将这些不同尺度的特征按channel进行拼接,得到了融合了多尺度的局部特征。
MSG结合了对点云的输入数据的dropout,也就是说,对输入的点云的每个点的坐标以一定的比例将其设为全0。这个比例在\(\left[0, p\right]\)之间随机取得,\(p \leq 1\)。文中说到为了确保点云不被全部dropout,因此设置\(p=0.95\)。
-
MRG
MSG的有一个明显的缺点,就是计算量大。在低层时,FPS降采样得到的点是很多的,对不同尺度的划分用不同的PointNet,计算量是庞大的。因此提供另外一种选择,减少了计算量,同时一定程度上保证了鲁棒性。MRG的思想就是,一方面,通过set abstraction提取特征,另一方面,直接对局部区域的点用一个PointNet进行处理,两个得到的特征进行拼接。
实验
实验部分,我们重点看看PointNet++与PointNet的对比以及消融实验。
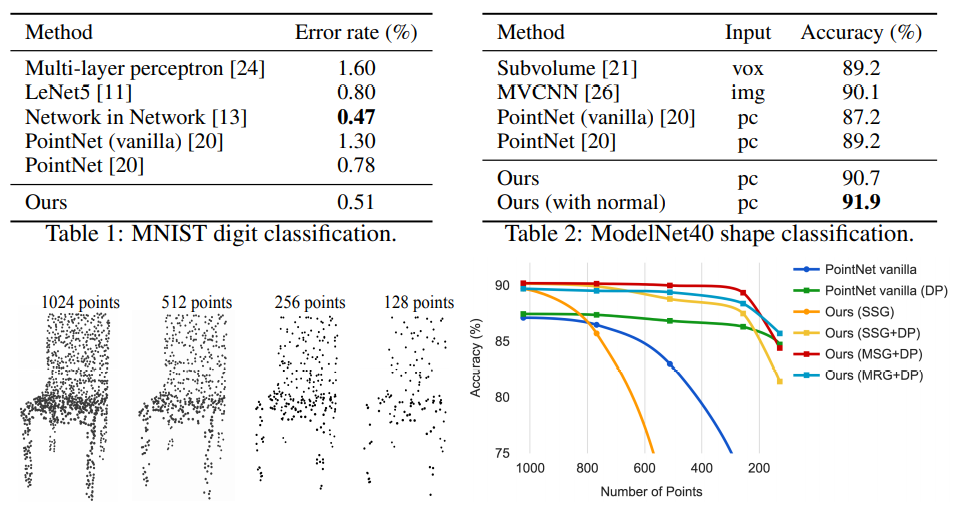
对于ModelNet40数据集的分类而言,实现了最好的性能,比PointNet++要好。对于点的稀疏性鲁棒性实验中,MSG的鲁棒性是最好的,同时可以看到,通过对输入点云进行dropout操作,提升了PointNet的鲁棒性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号