IMU紧耦合优化——前篇
最近接手的项目要求做imu紧耦合的图优化,因此研究一下关于imu的知识
这篇文章写的会比较啰嗦,因为本人将致力于厘清遇到的每个知识点和数学推导
前置知识:李代数
在看slam十四讲和上老板课的时候就学过李代数,但认知一直停留在知其然不知其所以然的层面上,看了这个视频后感到豁然开朗:
https://www.bilibili.com/video/BV1xw4m1k7Sb/?spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=a024b504b5b18828fc2bd89aeee49995
(注意,以下仅为个人列举的重点,强烈建议至少倍速看一下上面的视频才能循序渐进地理解李代数)
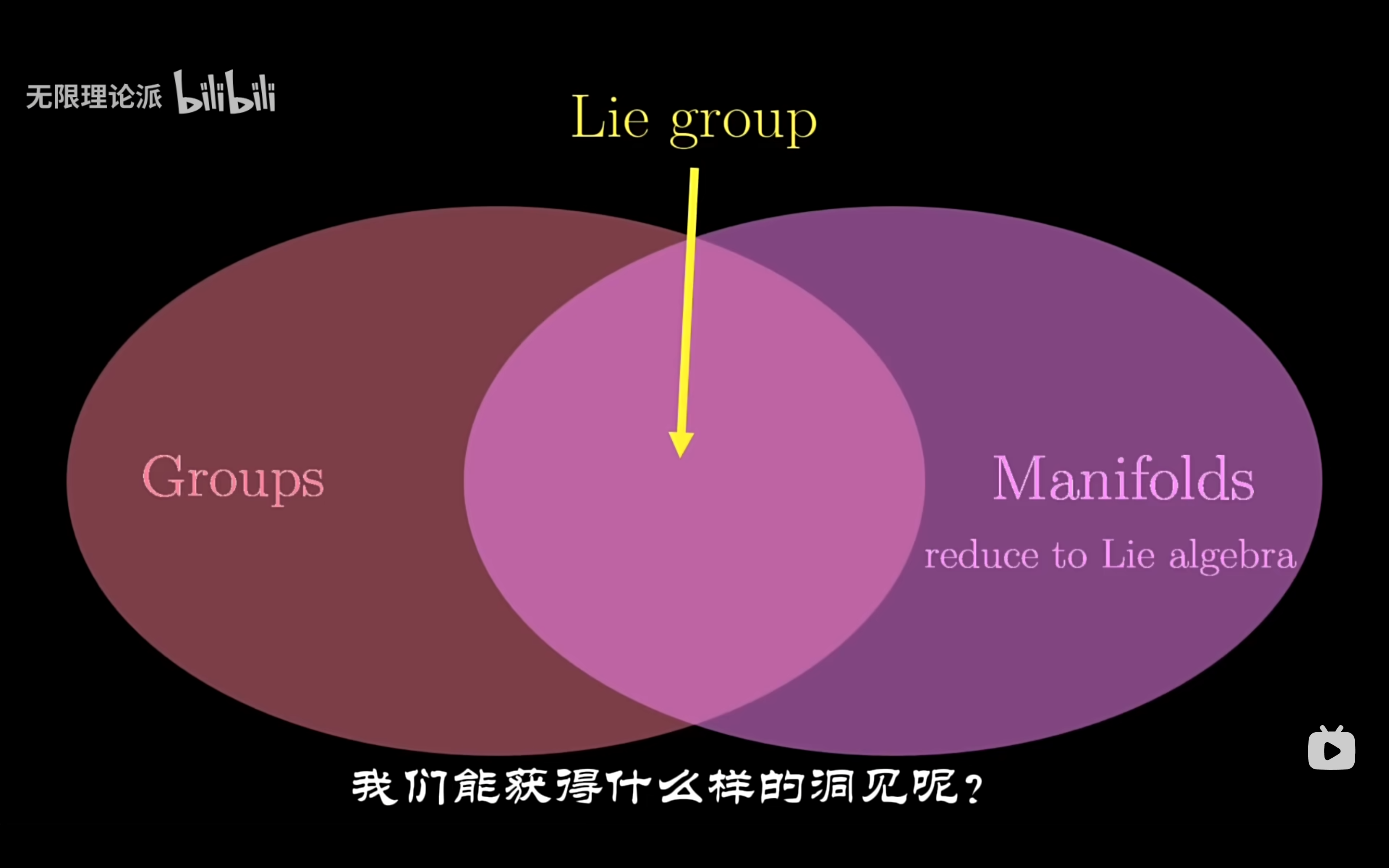
1 - 直观认识李群李代数与流形的关系
流形引入了坐标图的概念,通过坐标图,我们可以把流形上的点用欧几里得空间中的坐标来表示。例如,对于地球表面这个二维流形,我们可以用世界地图来映射,这个例子描述了李群以及李代数的关系。
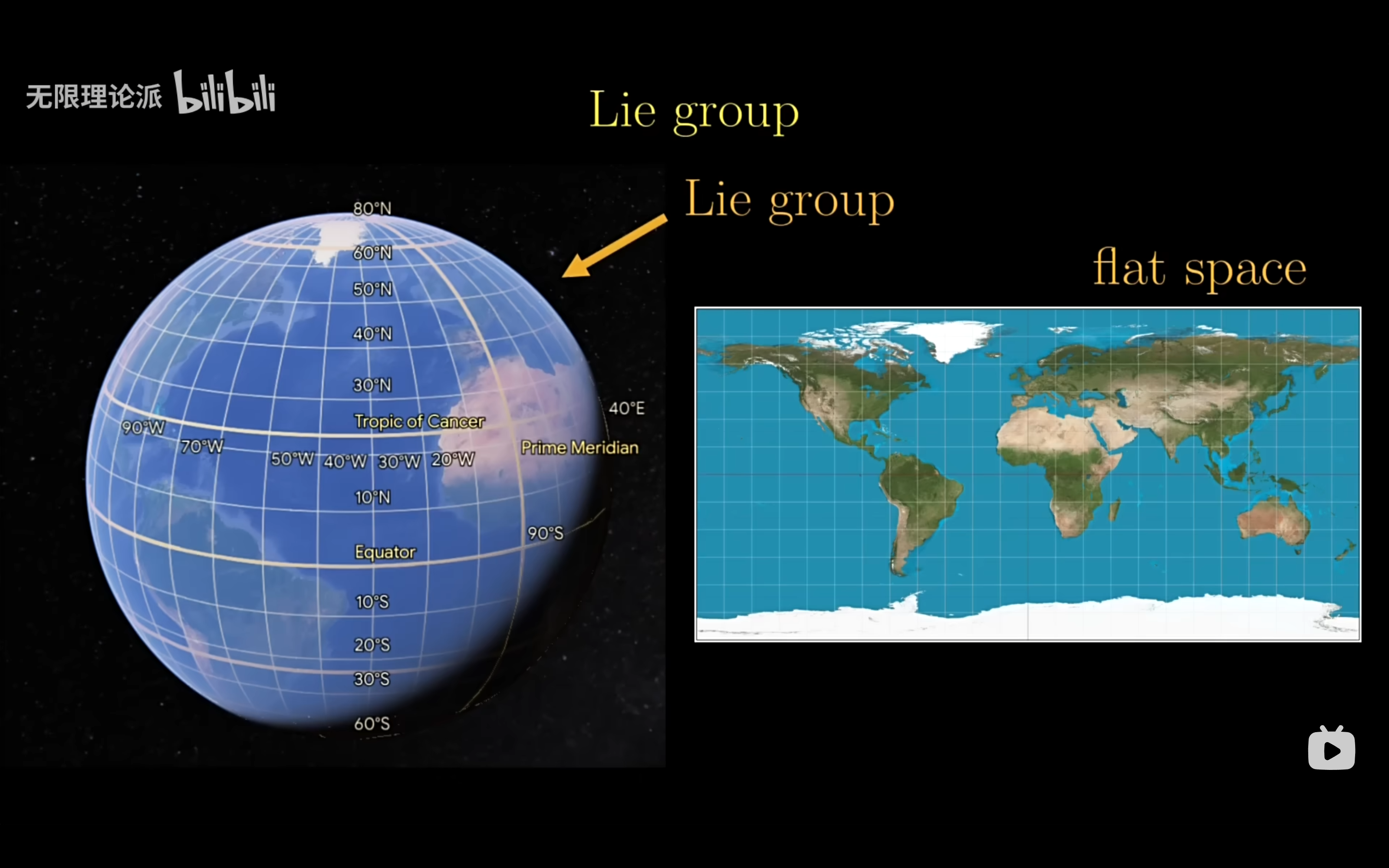
李群是一种复杂的弯曲流形,我们希望有一个平坦的空间来处理我们的坐标系,而这个平坦的空间就是李代数。
对于李群,找到了它的单位元素处的切空间,就找到了对应的李群李代数。
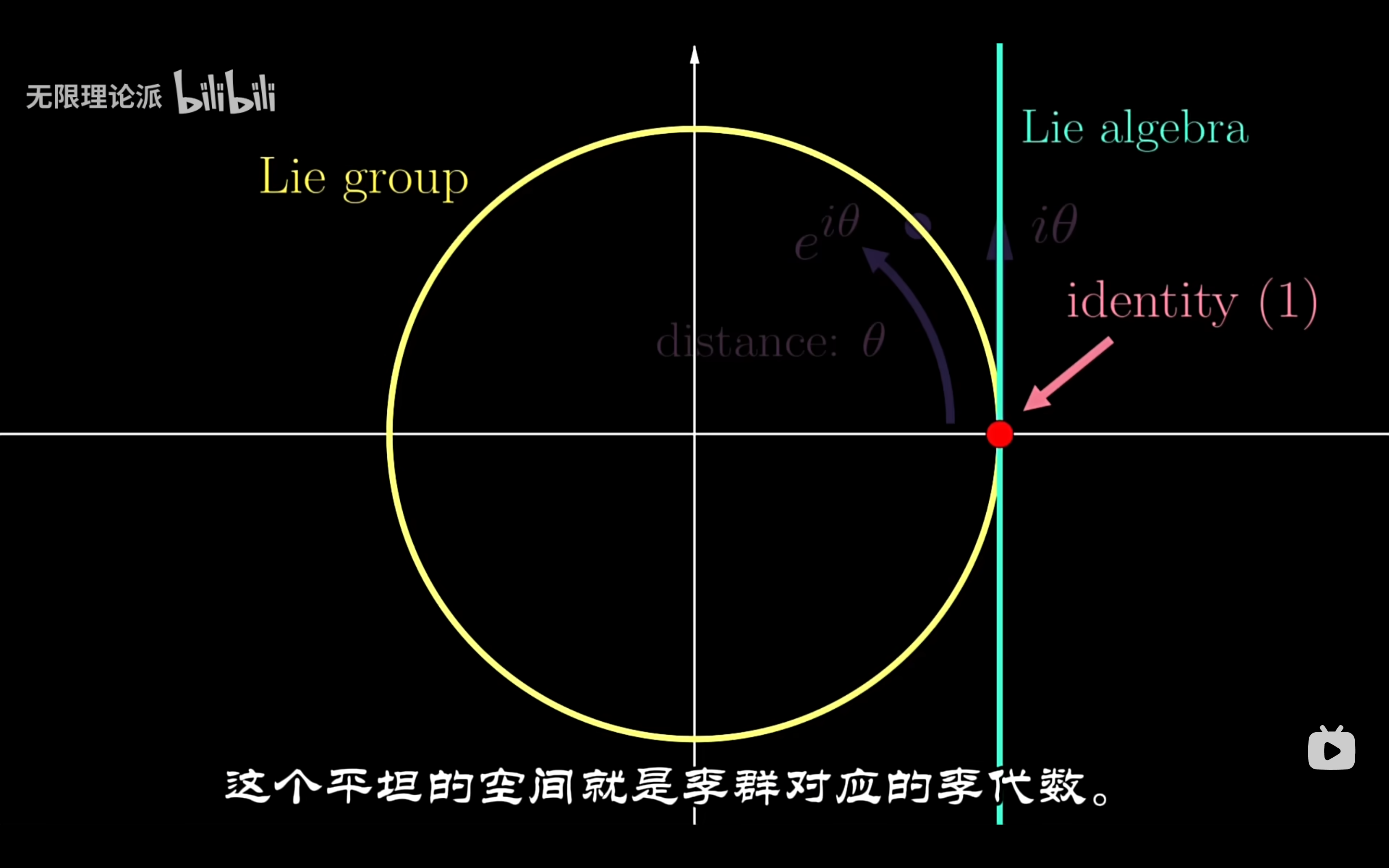
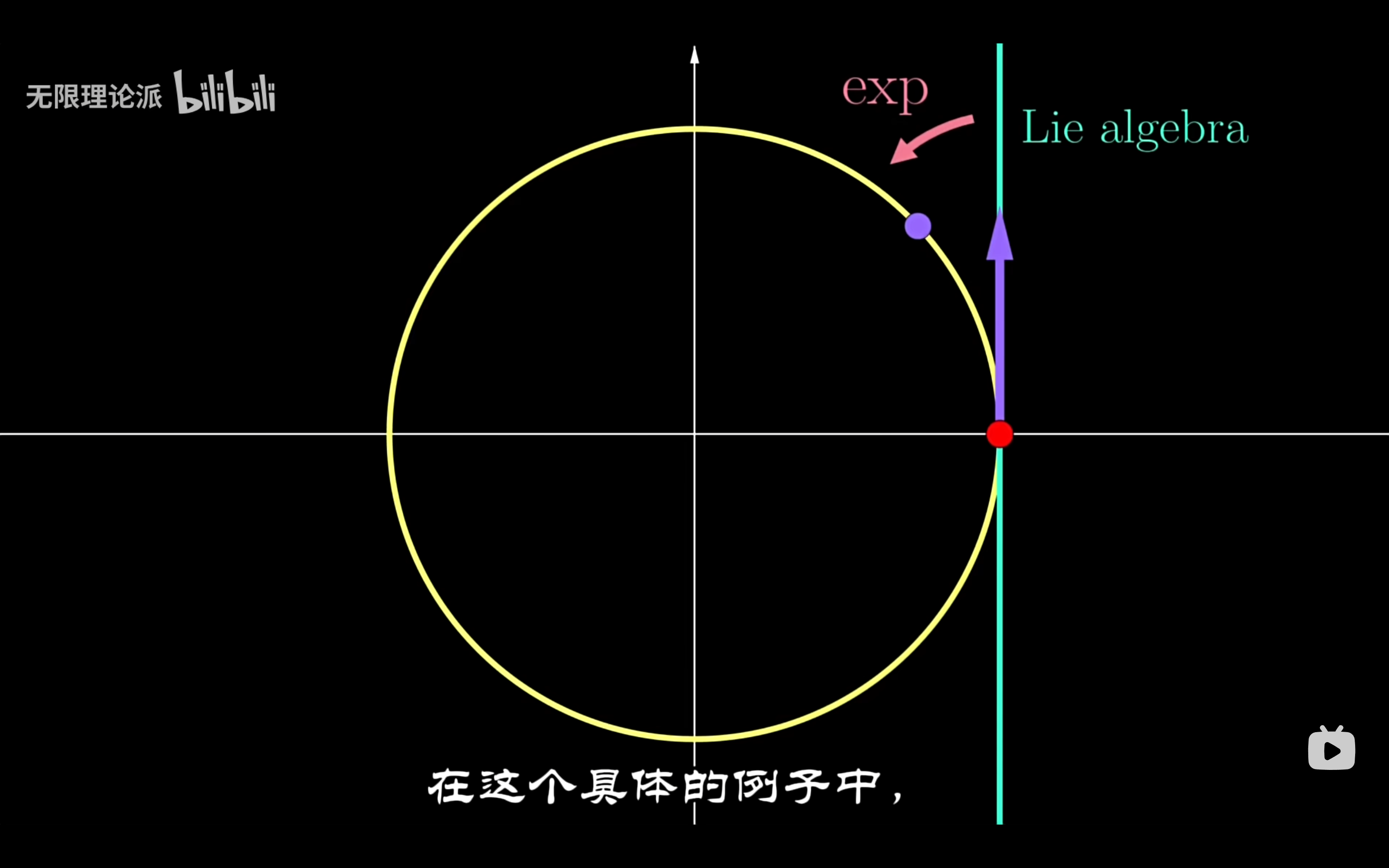
李代数作为坐标系的运作方式是:将切空间上的一个切向量“缠绕”在里群上,然后取终点。这种缠绕行为称为指数映射。
2 - 李群李代数的群性质
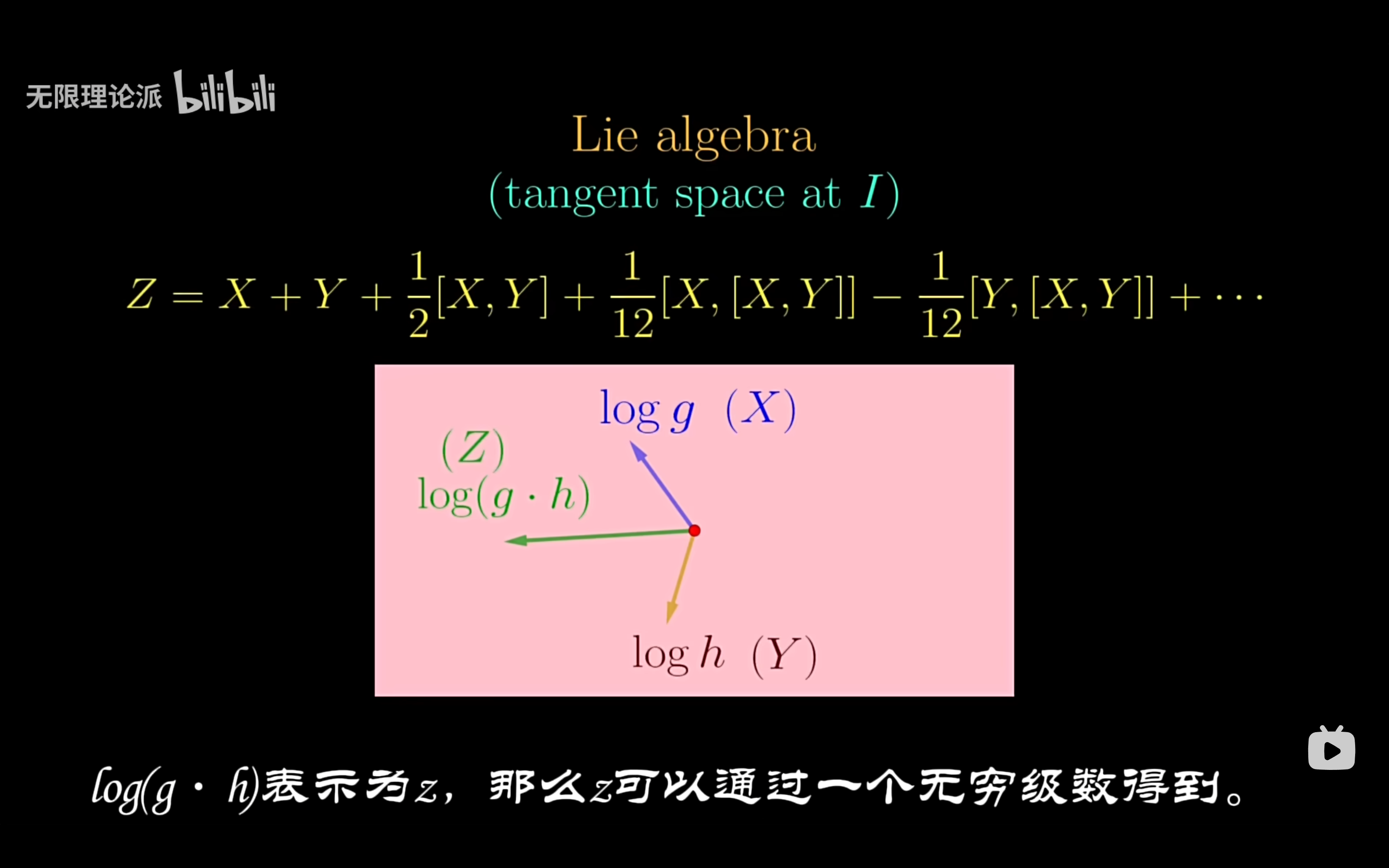
在李群中,最基本的运算是乘法,因此我们希望能把李群上的乘法转化为李代数上的操作。
李群的乘法到李代数运算的转化由一个无穷级数描述(BCH公式),李括号可以被理解为一个简单但特定的操作,它将两个切向量转化为另一个切向量,使我们能够在李代数上完全复制群的乘法。
从群乘法的角度来看,我们可以只在平坦的李代数上进行操作,而不必处理弯曲的空间。
Q:为什么我们需要进行这样的转化?
A:1. 简化优化问题。
在SLAM中常需对旋转矩阵进行优化,由于旋转矩阵具有正交性和行列式为 1 的约束,直接在李群上进行优化会引入额外的约束,使问题复杂。通过将问题转换到李代数上,可以将优化问题转化为无约束的优化问题,从而简化求解过程。
2. 局部线性化
以SO(3)和so(3)为例,李群SO(3)是一个非线性流形,其上的乘法操作是矩阵乘法,计算复杂度较高。而李代数so(3)是一个线性空间,其上的操作是向量加法和数乘。通过指数映射和对数映射,可以将李群上的乘法操作转化为李代数上的加法操作,从而简化计算。
至此,我们理解了为什么要有李代数这个东西,以及为什么要在实际问题中利用这个工具
3 - 李群李代数常用公式
(这部分的详细推导可见slam十四讲)
在 \(\mathbb{R}^3\) 中使用hat算子:
类似地,我们可以使用vee算子将斜对称矩阵映射到 \(\mathbb{R}^3\) 中的向量:
斜对称矩阵的一个有用性质是:
指数映射(在单位元处)exp : so(3) → SO(3) 将李代数的元素与旋转关联起来:
指数映射的一阶近似是:
对数映射(在单位元处)将SO(3)中的矩阵R与斜对称矩阵关联起来:
指数映射的增量近似:
其中 \(J_r(\phi)\) 是 ( SO(3) ) 的右雅可比矩阵,它将切空间中的加性增量与右侧应用的乘性增量关联起来(见图2):
\(J_r\)的含义:SO(3)关于so(3)的线性近似
对数映射的增量近似:
噪声建模
资料:
符号定义来源 - IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation, Christian Forster∗, Luca Carlone†, Frank Dellaert†, and Davide Scaramuzza∗
位移的噪声模型
我们可以使用多元高斯分布来建模位移在 \(\mathbb{R}^3\) 中的不确定向量:
其中 \(\tilde{t}\) 是分布的均值,$\Sigma \in \mathbb{R}^{3 \times 3} $ 是协方差矩阵。
定理(不确定向量的和): 给定两个正态分布的向量 $t_1 \sim \mathcal{N}(\tilde{t}_1, \Sigma_1) $ 和 $ t_2 \sim \mathcal{N}(\tilde{t}_2, \Sigma_2) $,则有:
根据定理,对于固定的 $ \tilde{t} $,我们可以将 $ t \sim \mathcal{N}(\tilde{t}, \Sigma) $ 等效地写成:
旋转的噪声扰动模型
在 \(SO(3)\) 中定义不确定性的自然方法是在切空间中定义分布,然后通过指数映射将其映射到 \(SO(3)\),其中 \(\epsilon\) 是三维向量,\(\Sigma\)是3x3的矩阵:
\(\tilde{R}\) 的分布为:
\(\mathcal{W}\) 指代这是一个扰动模型,其分布为
当 \(\Sigma\) 很小的时候(即扰动 \(\epsilon\) 很小),则 \(\log(R^\top \tilde{R})^\vee\) 也很小(高概率情况下)。在这种情况下,\(J_R(\epsilon) \approx I_3\),因此,分布可以进一步近似为:
附注:
-
指数函数左侧的项也称归一化因子
-
如何理解这个比例因子?(这部分是我的主观理解,证明可能有误)
\[J_r = \frac{\delta exp(\phi^\wedge)}{\delta \Delta \phi} \]\(J_r \cdot \Delta\epsilon\) 意味着当 \(\epsilon\) 变化这么多(\(\Delta \epsilon\))的时候,\(\tilde{R}\)的变化量。那么:
\[\frac{1}{J_r \cdot \Delta\epsilon} = \frac{1}{J_r(\log(R^\top \tilde{R})^\vee)} = \frac{\delta \tilde{R} }{\delta \epsilon} \]于是这个因子可以被理解为从 \(so(3)\) 分布到 \(SO(3)\) 分布的缩放因子
-
指数函数中的部分也有写作:
\[{-\frac{1}{2} \left\| \operatorname{Log}(R^{-1} \tilde{R}) \right\|_\Sigma^2} \]它是一个用协方差矩阵加权的二范数,展开方式:
\[\| \text{Log}(R^{-1} \tilde{R}) \|_{\Sigma}^2 = \left( \text{Log}(R^{-1} \tilde{R}) \right)^T \Sigma^{-1} \left( \text{Log}(R^{-1} \tilde{R}) \right) \] -
\(\Sigma^{-1}\) 也称 Information Matrix 信息矩阵

 浙公网安备 33010602011771号
浙公网安备 33010602011771号