

P3 策略学习
Policy Function Approximation 策略函数
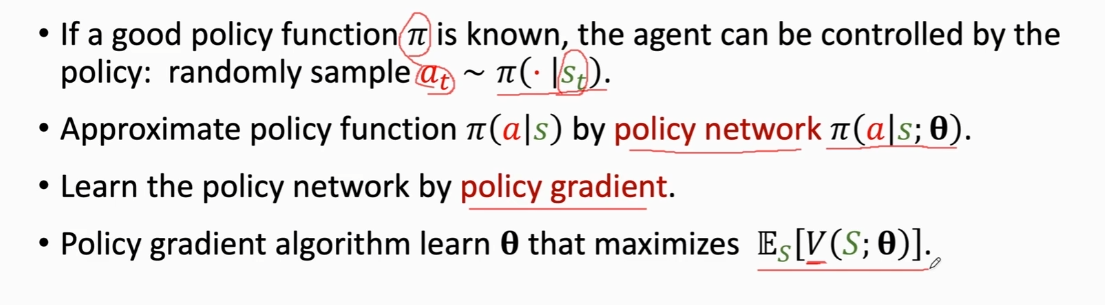
策略函数记做 π(a|s)
策略函数的输入是当前状态S 输出是一个概率分布,给每个动作一个概率值

如何得到这么一个策略函数,则需要构建一个策略神经网络,通过学习得到这么一个近似函数,还是以马里奥为例(包含左右上 三个动作,也就是三个维度):
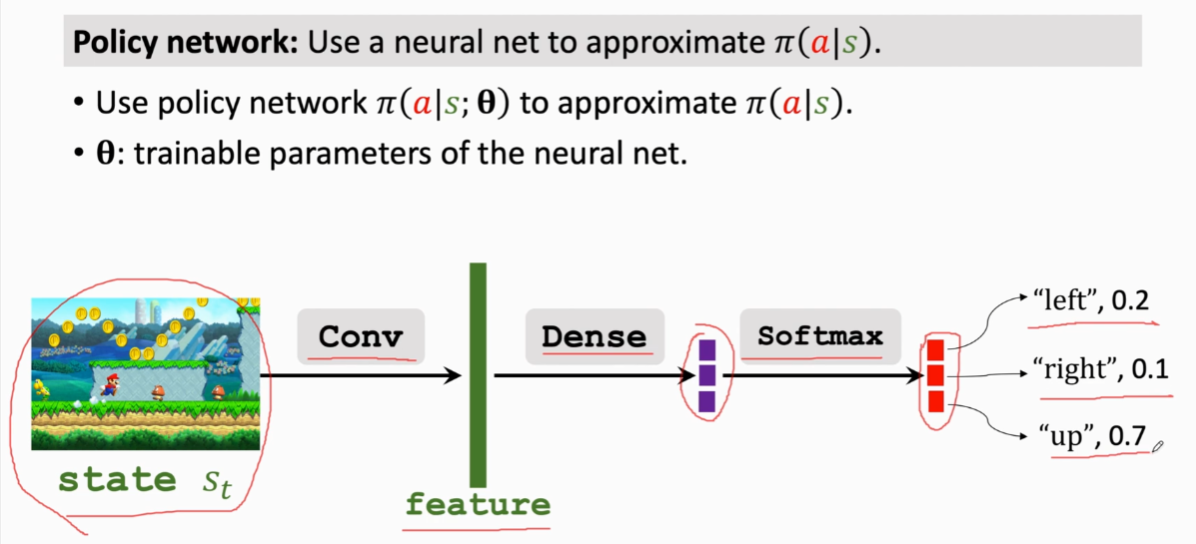
\[1.我们使用策略网络来近似得到策略函数,对于策略网络来说,\theta是神经网络的参数,开始\\是随机初始化的,后续通过学习来改进\theta
2.图中以马里奥为例,输入当前状态S,然后通过卷积层将状态变成特征向量,之后\\3.通过全连接层映射为3维向量,最后用softmax激活函数得到概率分布的三维向量\\
4.概率函数的密度的性质我们知道相加和要为1 这里图中0.1+0.2+0.7=1 符合定义\\(这也是为什么要用softmax的原因,因为它可以让输出的是正数且和为1)
\]
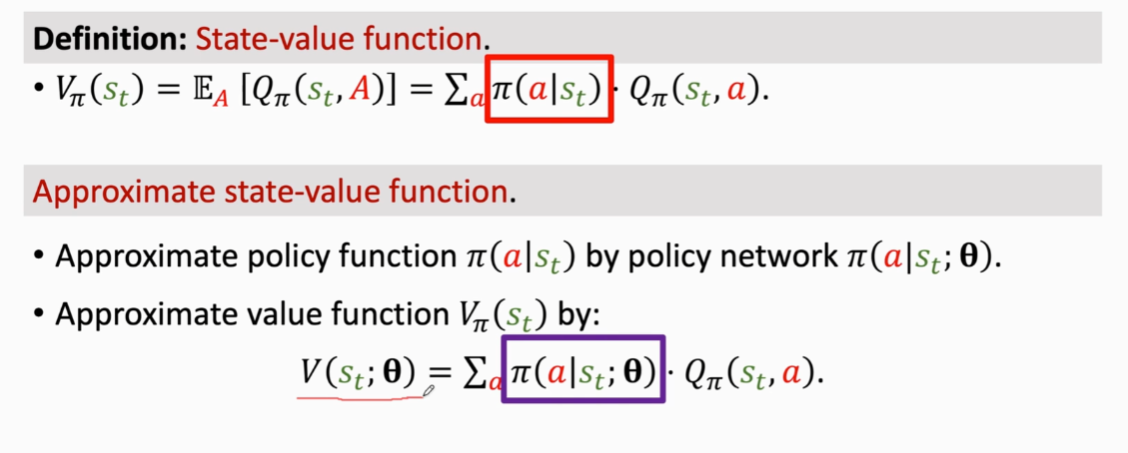
State—Value Function Approximation 状态价值函数

当状态是离散的时候,可以展开成π函数和Qπ的乘积形式(若是连续型的则是需要用积分来代替连加
Policy—Based Reinforcenment Learing 策略学习
主要思想:
V是来评价状态s的,对于输入的状态s,策略网络越好,V的值也就越高 。那么如何改进策略网络呢,我们可以改进模型参数θ,来让V(s;θ)变大。基于此想法,我们可以将目标函数设为θ的期望。

这是一个基于θ的目标函数,将状态S作为随机变量,然后对s求期望消掉s,这样只会剩下一个变量 θ
如何提高θ,则需要用到策略梯度的算法
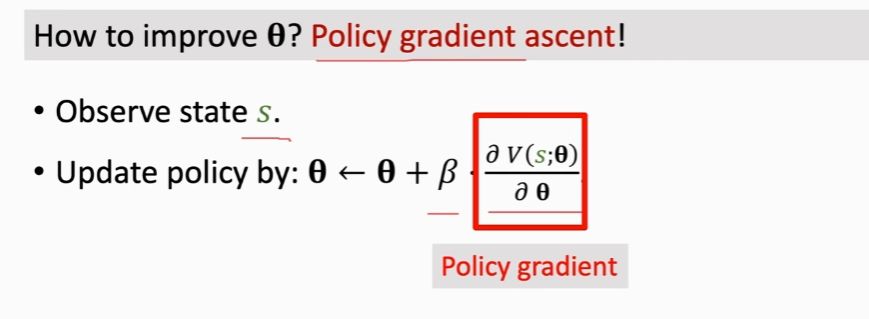
β是学习因子,而后对于θ的求导则是策略梯度(policy gradient,即v函数对于神经网络参数θ的导数)
policy gradient
推导:
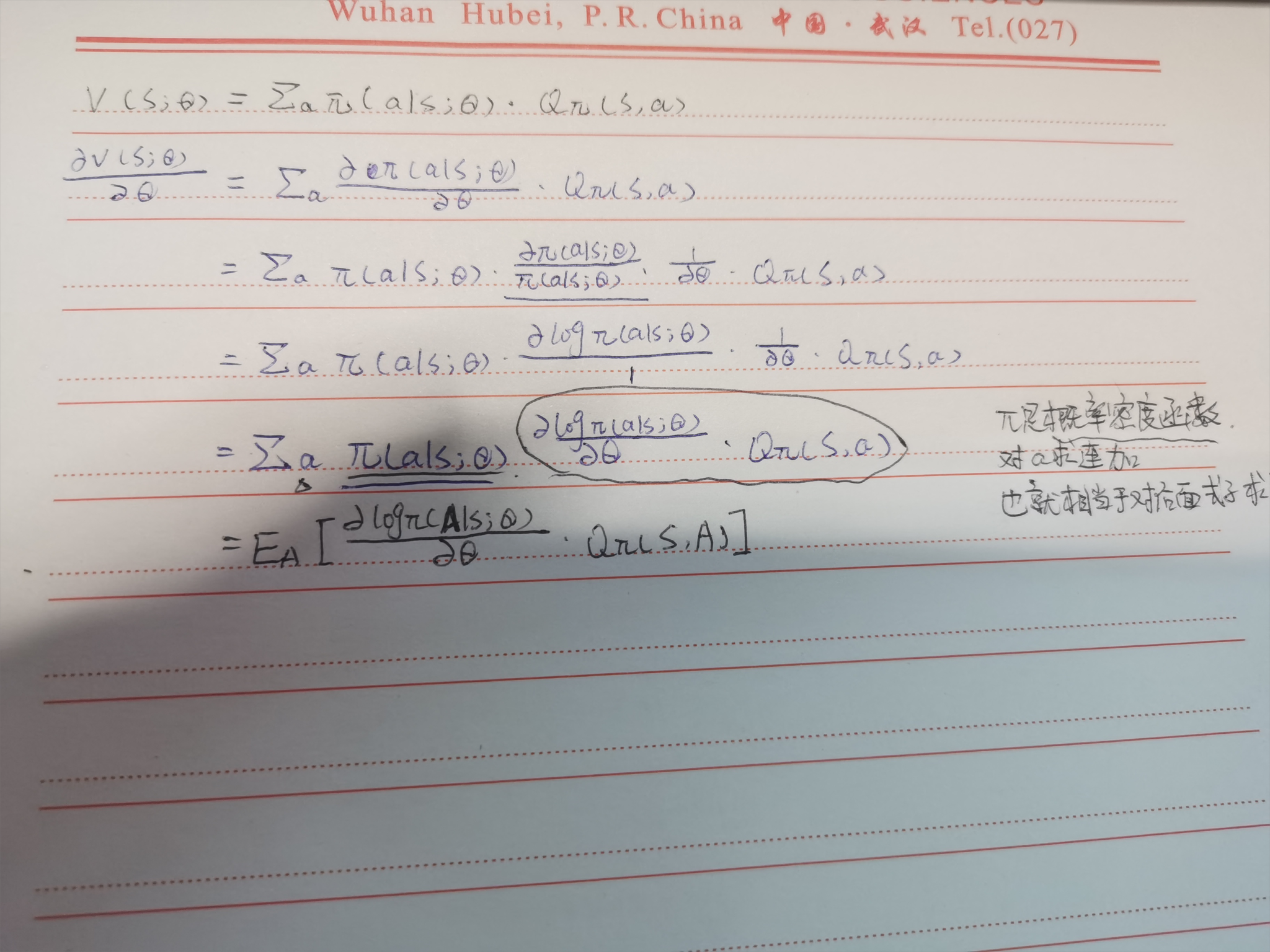
两种形式(等价的:
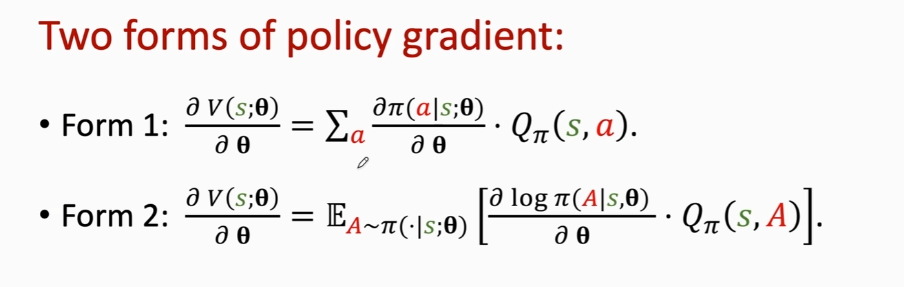
使用情况:
-
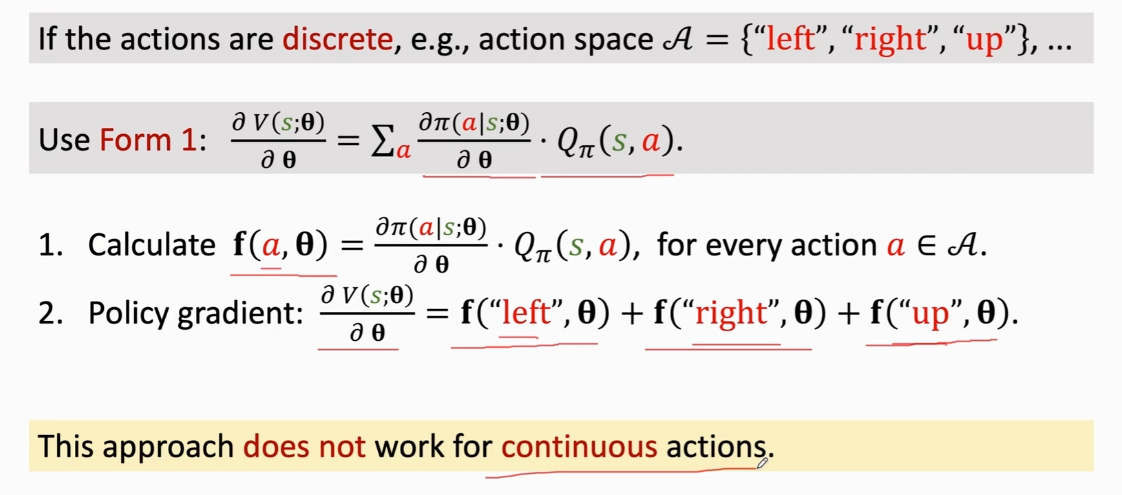
若是离散型,如马里奥运动是 左、右、上的 则用第一种(本质上也就是每个离散值的累加 PS:不适用连续的
-
若是连续型的,则用第二种,由于π函数是个神经网络,非常复杂,用普通的积分是求不出的,因此这里要使用蒙特卡洛近似来近似得到期望(PS:对于离散的也是适用的
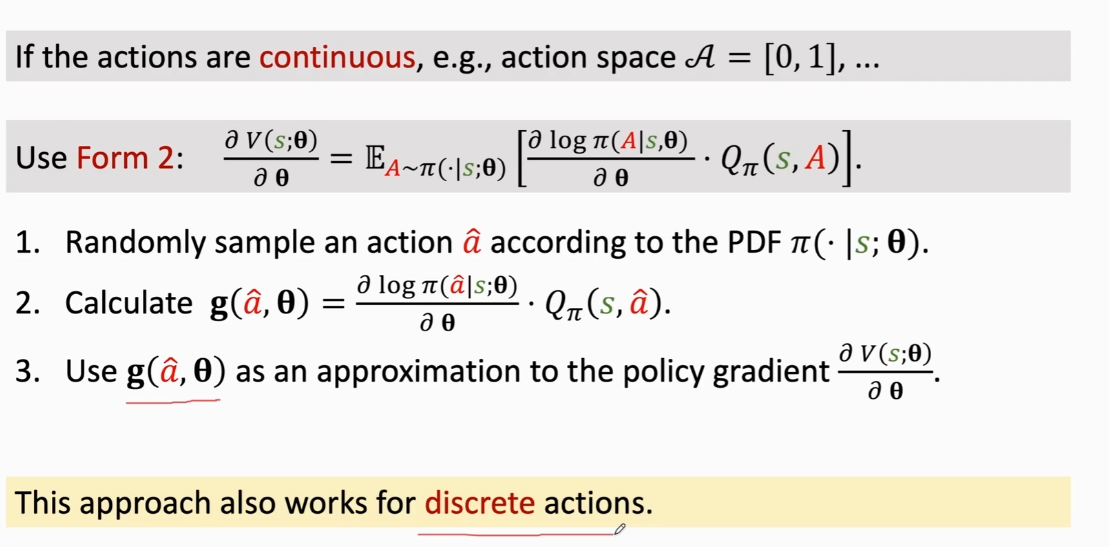 \[1.随机抽样得到动作\\ 2,3.用g(a,\theta)来近似表示当前动作的策略梯度(因为是其的无偏估计\\ \]
\[1.随机抽样得到动作\\ 2,3.用g(a,\theta)来近似表示当前动作的策略梯度(因为是其的无偏估计\\ \]
总结:
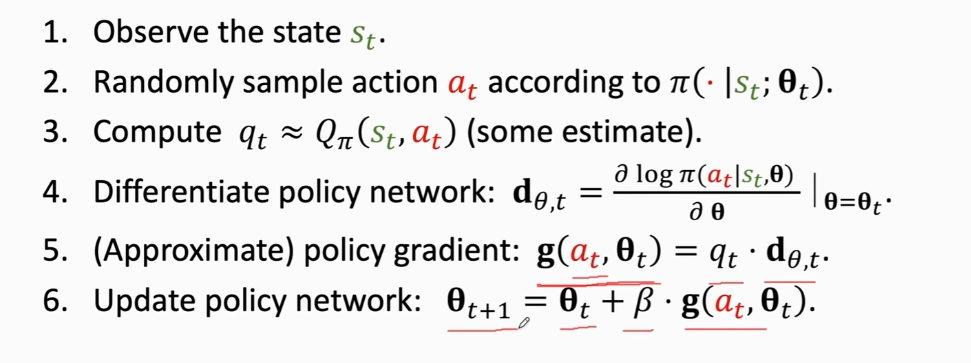
\[1.观察得到当前状态S_t\\
2.随机抽样得到动作a_t\\
3.计算价值函数Q_π的值,并记为q_t\\
4.对策略网络π求导,得到策略网络π对于θ的导数d_{\theta,t},其大小和θ是一样的\\
5.近似的算策略梯度,用之前所提到的蒙特卡洛近似g(a_t,\theta)=q_t*d_{\theta,t}\\
6.更新新的策略参数\theta_{t+1}
\]
上述算法中还有一个没解决的问题,这个Qπ我们并不知道,因此算不出来这个值,因此我们需要近似计算这个值

两个方法:
-
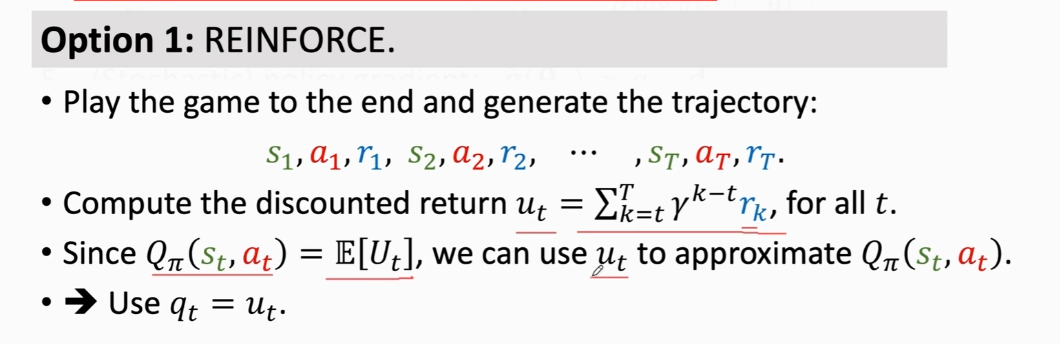 \[1.完整的进行一局过程,记录每一次的状态,动作,奖励(s,a,r)\\ 2.使用上述公式得到u_t,u_t是所有奖励r的加权求和\\ 3.由于价值函数的Q_π是U_t的期望,因此我们可以用U_t的观测值u_t来近似Q_π\\ 4.我们用u_t来近似表示q_t\\ 总结:REINFORCE方法需要先执行一次,然后通过处理记录的数据来更新网络 \]
\[1.完整的进行一局过程,记录每一次的状态,动作,奖励(s,a,r)\\ 2.使用上述公式得到u_t,u_t是所有奖励r的加权求和\\ 3.由于价值函数的Q_π是U_t的期望,因此我们可以用U_t的观测值u_t来近似Q_π\\ 4.我们用u_t来近似表示q_t\\ 总结:REINFORCE方法需要先执行一次,然后通过处理记录的数据来更新网络 \] -
 \[使用另外一个神经网络来近似价值函数Q_π\\ 这也就是 演员—评论家方法 (具体见P4 \]
\[使用另外一个神经网络来近似价值函数Q_π\\ 这也就是 演员—评论家方法 (具体见P4 \]
总结

 浙公网安备 33010602011771号
浙公网安备 33010602011771号