ATPG的D算法介绍
ATPG算法
实现测试向量自动化生成的算法,其中包含D算法、PODEM算法和FAN算法等。
D算法
为测试某一节点单固定故障,将其故障信息传递反映到输出中体现出来,我们把用穷举得出正确路径的方法称之为D算法。
每个节点分为四种状态,1、0、X、D和D(-)。
其中,X为0或1,意思是该节点值不影响最终结果。D为正常1故障0,D(-)为正常0故障1。
下面是一个D算法的实例
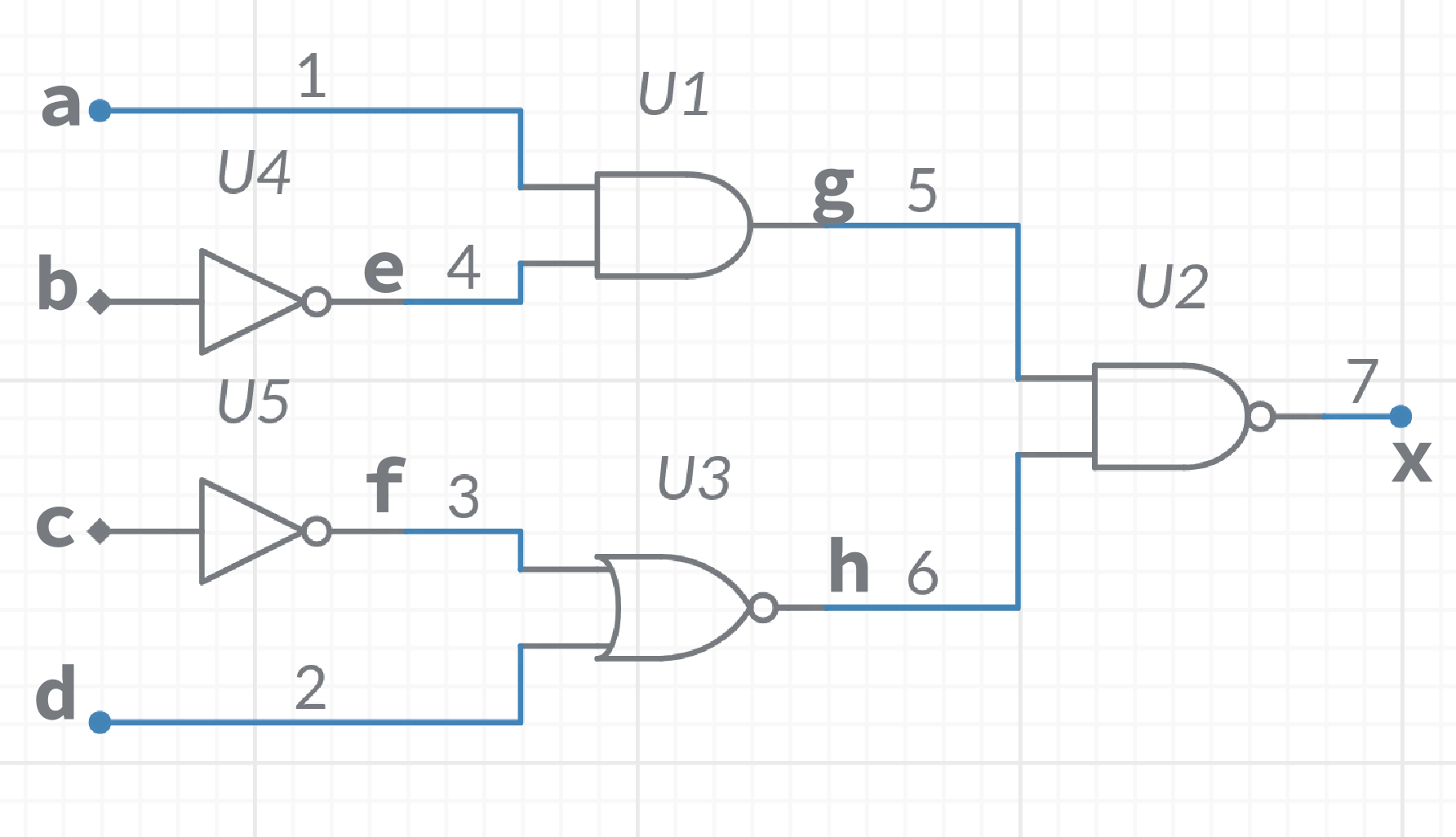
检测g单固定故障0
全步骤如下
| 步骤 | a | b | c | d | e | f | g | h | x |
|---|---|---|---|---|---|---|---|---|---|
| 激活 | 1 | 1 | D | ||||||
| 传播 | D | D(-) | |||||||
| 合理化 | D | 1 | D(-) | ||||||
| 回溯 | 1 | 1 | D | 1 | D(-) | ||||
| 合理化 | 0 | 0 | 1 | ||||||
| 回溯 | 1 | 0 | 1 | 0 | D | 1 | D(-) | ||
| 合理化 | 0 | 1 | |||||||
| 回溯 | 1 | 0 | 0 | 1 | 0 | D | 1 | D(-) | |
| 合理化 | 1 | 0 | |||||||
| 回溯 | 1 | 0 | 1 | 0 | 1 | 0 | D | 1 | D(-) |
最终我们可以得出测试向量为 1010,测试图形为 HLHL。
我们把激活故障的输入节点值集合称之为 奇异立方,传播时的路径称之为 敏化路径,d或d(-)出现在原始输出则为 追踪成功,回溯 的最终输入结果为测试图形。
其他算法
(待补充)
参考资料

 浙公网安备 33010602011771号
浙公网安备 33010602011771号