
斜率优化dp
斜率优化 dp
前言:一个非常套路的 dp 优化方法。
前置知识:单调队列优化 dp
例题1
一个非常板子的题目:P3628 [APIO2010] 特别行动队
题意简述:给定一个序列\(A\),找到一些连续子串,每个子串\([l,r]\)的贡献为\(aX^2+bX+c\),\(X\)为\([l,r]\)区间和,求最大贡献。
数据范围:\(1 \leq n \leq 10^6\),\(-5 \leq a \leq -1\),\(-10^7 \leq b \leq 10^7\),\(-10^7 \leq c \leq 10^7\),\(1 \leq A_i \leq 100\)。
Solution
定义\(f(i)\)为最后一个连续子串以\(i\)结尾的最大贡献,容易写出状态转移方程。
时间复杂度为\(O(n^2)\),考虑优化。
观察状态转移方程,可以发现出现了\(i,j\)乘积项,不好进行拆分+单调队列优化。
先不看\(max\),展开式子:
回忆单调队列优化 dp,我们实质上是在维护一个决策集合,将\(i\)看做定值,维护只与\(j\)有关的多项式\(val(j)\),及时排除掉不可能作为最有决策的取值。
通常我们将与\(i\)有关的项看做常量,将与\(j\)有关的项看做变量,然后根据多项式\(val(j)\)的单调性来排除冗余情况。
我们将这个思想沿用到这里,将与i有关的项看做常量,将与j有关的项看做变量。
然后我们发现,通过移项,这个式子可以变为形如\(y=kx+b\)的形式,其中\(x,y\)是与\(j\)有关的项,\(k,b\)是与\(i\)有关的项。
所以:
有了这个有什么用呢?
将它们画在笛卡尔坐标系上,仔细思考,我们在坐标系上寻找最优决策实际上是给定一个斜率,让\(f(i)\)所在的\(b(i)\)最大。
我们从上往下平移这条给定斜率的直线。
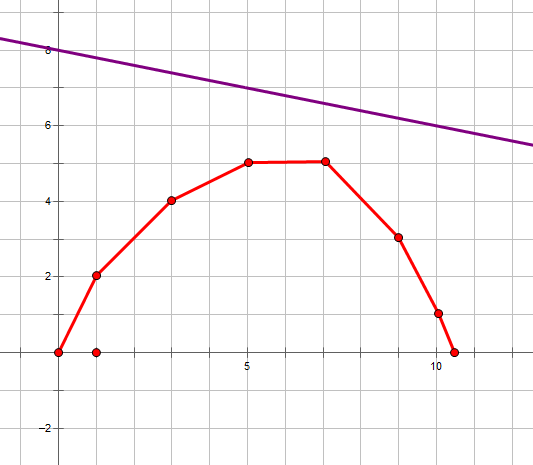
我们碰到的第一个点就是最优决策。
通过观察图像性质,可以发现,可以成为最有决策当且仅当这个点在所有点构成的点集的凸包上。
上凸包上相邻两点的斜率递增,下凸包反之。
于是可以维护斜率\(k(i)=2as_i\),单调递增,形如单调队列,只留下可行决策。
同时,由于此题定斜率\(k(i)=2as_i\)一定满足单调递增,所以所有小于当前斜率的直线以后也一定不能成为最优决策,可以从队头出队。P.S.这个不是所有斜率优化 dp,都能使用,如果定斜率不满足单调性,需要用二分找到最优决策。
代码如下:
#include<bits/stdc++.h>
#define int long long
using namespace std;
const int N=1e6+10;
int s[N],n,m,a,b,c,q[N],l=1,r=1,ans,f[N];
double slope(int i,int j){return ((f[i]-f[j])+(1.0*a*s[i]*s[i]-b*s[i])-(a*s[j]*s[j]-b*s[j]))/(2*a*s[i]-2*a*s[j]);}
int work(int i,int j){return a*(s[i]-s[j])*(s[i]-s[j])+b*(s[i]-s[j])+c;}
signed main(){
scanf("%lld%lld%lld%lld",&n,&a,&b,&c);
for(int i=1;i<=n;i++)scanf("%lld",&s[i]),s[i]+=s[i-1];
for(int i=1;i<=n;i++){
while(l<r&&slope(q[l],q[l+1])<s[i])l++;
f[i]=f[q[l]]+work(i,q[l]);
while(l<r&&slope(q[r-1],q[r])>slope(q[r],i))r--;
q[++r]=i;
}
printf("%lld\n",f[n]);
return 0;
}
例题2
另一个很板的题目:CF1715E Long Way Home
题意简述:给一张\(n\)个点,\(m\)条边的无向图,边有边权。可以进行\(k\)次传送,花费\((x-y)^2\),求最短路。
Solution
又遇到了\(i,j\)的乘积项,考虑斜率优化。
我们考虑拆点分层图,但我们每次更新的时候都要都要将\(n\)个点全部加进来找到最优答案。
我们可以先每次更新最短路,在用斜率优化更新一遍。
现将\(n\)个点都加入集合,在不断根据斜率单调性优化。
板子题一道。
代码如下:P.S.隐式建图。
#include<bits/stdc++.h>
typedef long long ll;
using namespace std;
const int N=1e5+10,M=N*2;
int head[N],ver[M],nxt[M],tot=1;
ll edge[M];
void add(int x,int y,ll z){
ver[++tot]=y,edge[tot]=z,nxt[tot]=head[x],head[x]=tot;
}
int n,m,k;
bool v[N];
ll d[N],f[N],q[N],l,r;
priority_queue<pair<ll,int>>heap;
void dijkstra(){
memset(v,0,sizeof(v));
heap.push(make_pair(0,1));
d[1]=0;
while(heap.size()){
int x=heap.top().second;heap.pop();
if(v[x])continue;
v[x]=1;
for(int i=head[x];i;i=nxt[i]){
int y=ver[i];
if(d[y]>d[x]+edge[i]){
d[y]=d[x]+edge[i];
heap.push(make_pair(-d[y],y));
}
}
}
}
double slope(ll x,ll y){
if(x==y)return 1e18;
return 1.0*(f[x]+x*x-f[y]-y*y)/(x-y);
}
int main(){
scanf("%d%d%d",&n,&m,&k);
for(int i=1,x,y,z;i<=m;i++)scanf("%d%d%d",&x,&y,&z),add(x,y,z),add(y,x,z);
memset(d,0x3f,sizeof(d));d[1]=0;
while(k--){
dijkstra();
for(int x=1;x<=n;x++)f[x]=d[x];
l=r=1;q[1]=0;
for(int i=1;i<=n;i++){
while(l<r&&slope(q[r-1],q[r])>slope(q[r],i))r--;
q[++r]=i;
}
for(int i=1;i<=n;i++){
while(l<r&&slope(q[l],q[l+1])<2.0*i)l++;
if(d[i]>f[q[l]]+(i-q[l])*(i-q[l])){
d[i]=f[q[l]]+(i-q[l])*(i-q[l]);
heap.push(make_pair(-d[i],i));
}
}
}
dijkstra();
for(int i=1;i<=n;i++)printf("%lld ",d[i]);
puts("");
return 0;
}
总结
推出状态转移方程后,通过是否有\(i,j\)的乘积项进行分类。
-
如果没有\(i,j\)的乘积项,分离\(i,j\),考虑单调队列维护决策集合。
-
如果有\(i,j\)的乘积项,移项为一次函数,考虑斜率优化维护决策集合。
-
更特殊的,如果\(i,j\)的乘积项次数大于等于\(2\),考虑是否有决策单调性,运用四边形不等式优化。
同时,要考虑决策集合,用二分/数据结构优化加入/删除集合的时间复杂度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号