

相机标定
1.相机成像原理:相机的原理是小孔成像,成像的方式是只有一个小孔能透过光线导致物体的成像亮度很低,为了解决亮度问题,所以使用了透镜,虽然这样可以解决亮度的问题,但是由于透镜的制作工艺会使成像产生多种形式的畸变,也就是说成像后的图像会和真实世界的景象不一致,为了解决这个问题,我们就利用畸变系数来矫正这种像差。
2.相机标定概念:相机就是将三维世界的场景转为二维的照片,但是由于这个过程会有三维坐标到二维坐标的转换及透镜畸变的问题存在,我们就需要寻找一个模型或者说一个函数,将三维场景作为输入,二维照片作为输出。找到这个模型或者这个函数的参数就是相机标定要做的事。所以说相机标定就是将三维场景完整的弄成二维照片。
3.相机标定的四个坐标轴:
1)世界坐标系:就是三维世界的坐标系,描述目标物在真实世界的位置。单位为米m。
2)相机坐标系:在相机上建立的坐标系,从相机的角度描述物体位置,是沟通世界坐标系和像素、图像坐标系的桥梁。单位为米m。
3)图像坐标系:成像过程中物体从相机坐标系到图像坐标系的投影投射关系而引入,方便进一步得到像素坐标系下的坐标。单位为毫米mm。
4)像素坐标系:物体成像后的像点在数字图像上(相片)的坐标而引入,是我们真正从相机内读取到的信息所在的坐标系。单位为(个)像素。
4.四个坐标轴图解:
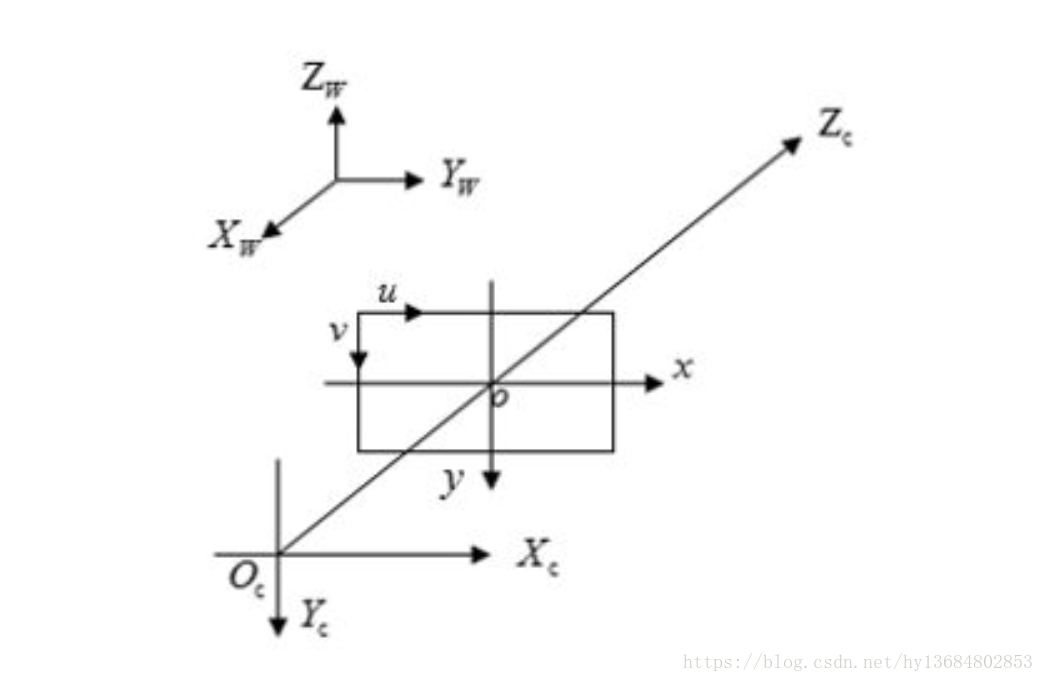
世界坐标系:Xw、Yw、Zw。相机坐标系: Xc、Yc、Zc
图像坐标系:x、y。像素坐标系:u、v
其中,相机坐标系的Z轴与光轴重合,且垂直于图像坐标系平面并通过图像坐标系的原点,相机坐标系与图像坐标系之间的距离为焦距f(也即图像坐标系原点与焦点重合)。像素坐标系平面u-v和图像坐标系平面x-y重合,但像素坐标系原点位于图中左上角(之所以这么定义,目的是从存储信息的首地址开始读写,还有一点要注意的是像素坐标系的单位变成了像素个数)。
5.相机标定常用算法:略
6.相机标定前后对比:
标定前
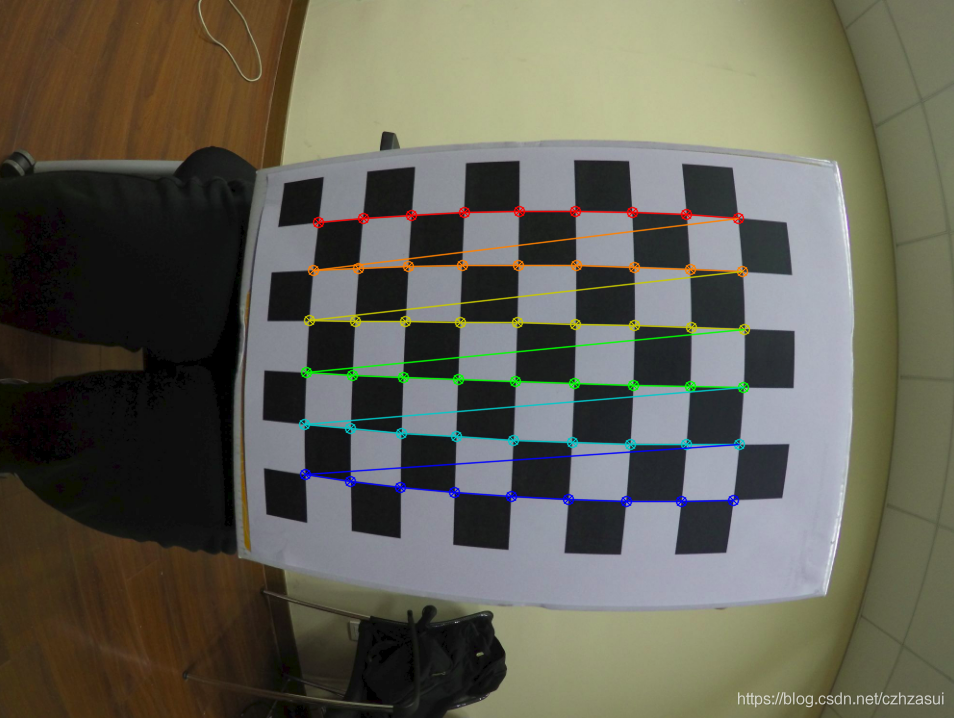
标定后


 浙公网安备 33010602011771号
浙公网安备 33010602011771号