《机器学习》第二次作业——第四章学习记录和心得
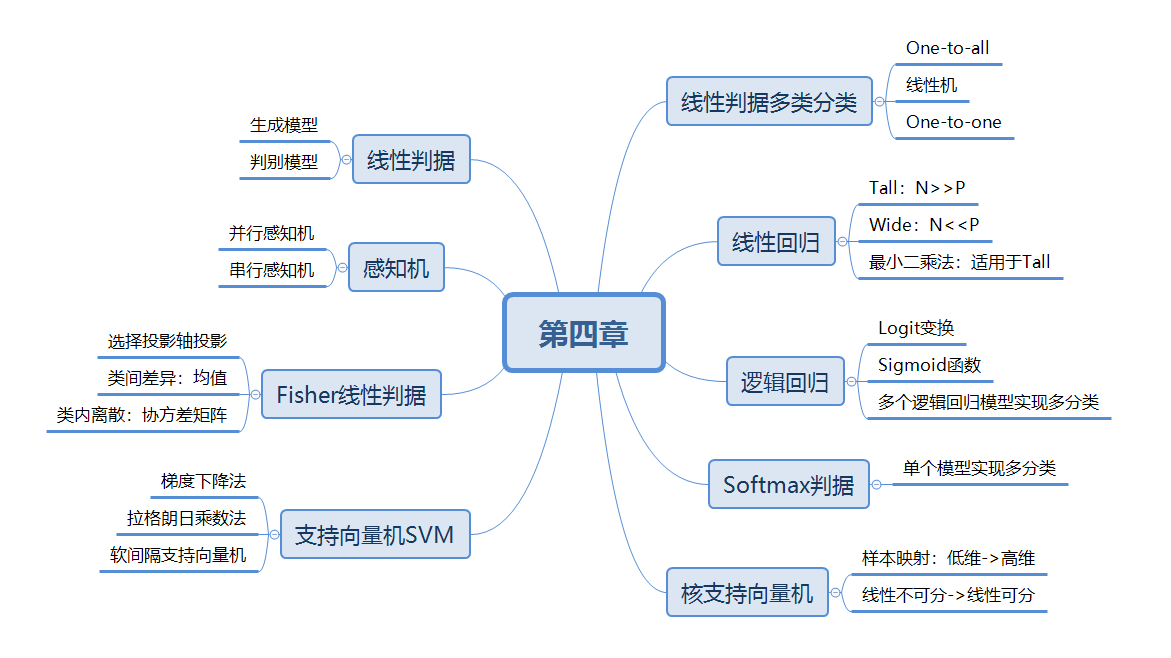
一、线性判据
1.两种模型
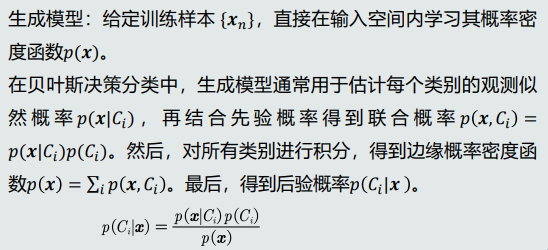
生成模型
优势
①可以根据 𝑝(𝒙) 采样新的样本数据。
②可以检测出较低概率的数据,实现离群点检测。
劣势
如果是高维的 𝒙 ,需要大量训练样本才能准确的估计 𝑝(𝒙) ;否则,会出现维度灾难问题。
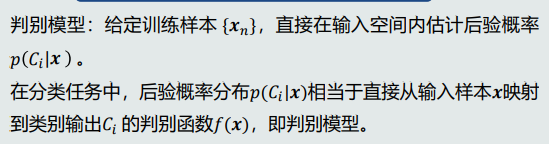
判别模型
优势
快速直接、省去了耗时的高维观测似然概率估计。
最简单的判别模型:线性判据
2.线性判据
定义
如果判别模型 𝑓(𝒙) 是线性函数,则 𝑓(𝒙) 为线性判据。
可以用于两类分类,决策边界是线性的。
也可以用于多类分类,相邻两类之间的决策边界也是线性的。
优势
计算量少:在学习和分类过程中,线性判据方法都比基于学习概率分布的方法计算量少。
适用于训练样本较少的情况。
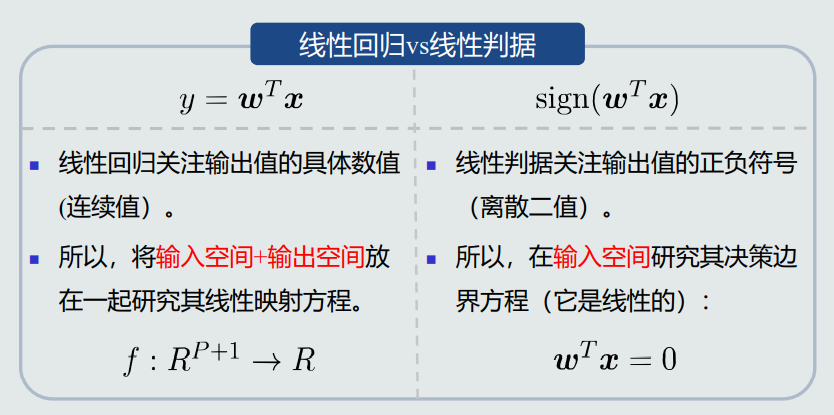
数学表达
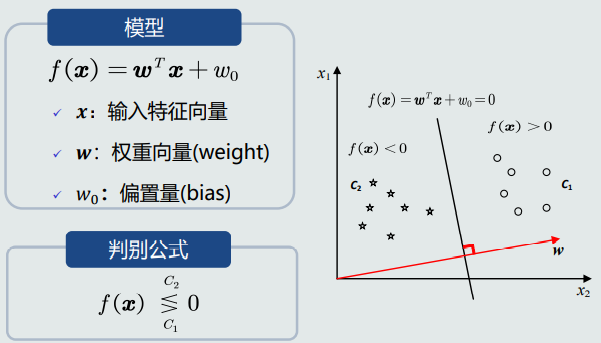
决策边界
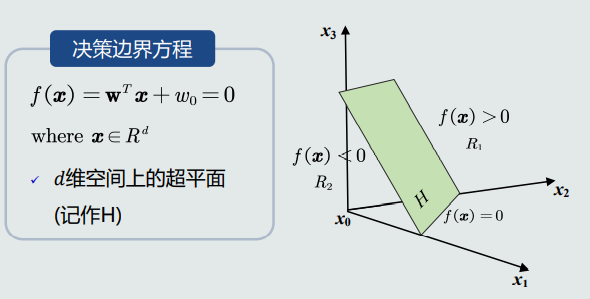
模型中 𝒘 垂直于决策边界上的任何向量,即 𝒘 垂直于决策边界H,是H的法向量。𝒘 决定了决策边界H的方向。
模型中 𝑤0 决定了决策边界的偏移量,使其能够满足两个类输出值分别为正负。
任意样本𝒙到决策边界的垂直距离为:
由上式可知,原点到决策边界的距离为
可见,𝑤0也决定决策边界相对于坐标原点的位置。
参数空间&解域
由于训练样本个数通常会远远大于参数个数(𝒘 的维度+ 𝑤0 的维度),所以线性判据满足条件的解不唯一。
学习算法就是要找到一个最优解。
参数空间
由各个参数维度构成的空间。
参数的每个可能解相当于是参数空间的一个向量。
解域
在参数空间内,参数的所有可能解所处的范围。
每个训练样本 𝒙𝑖 在参数空间定义了一个通过原点、且垂直于 𝒙𝑖 的超平面。
目标函数
常见的目标函数:误差(均方差)、交叉熵···
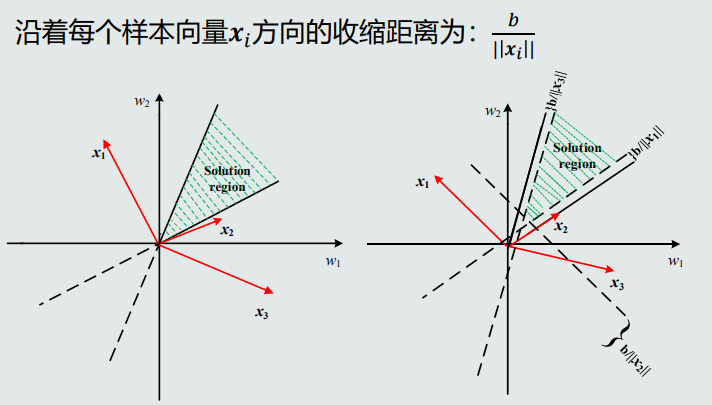
加入约束条件(例如,正则项):提高泛化能力。
加入约束后会导致解域范围收缩。
目标函数的求解:最小化/最大化目标函数。
二、感知机算法
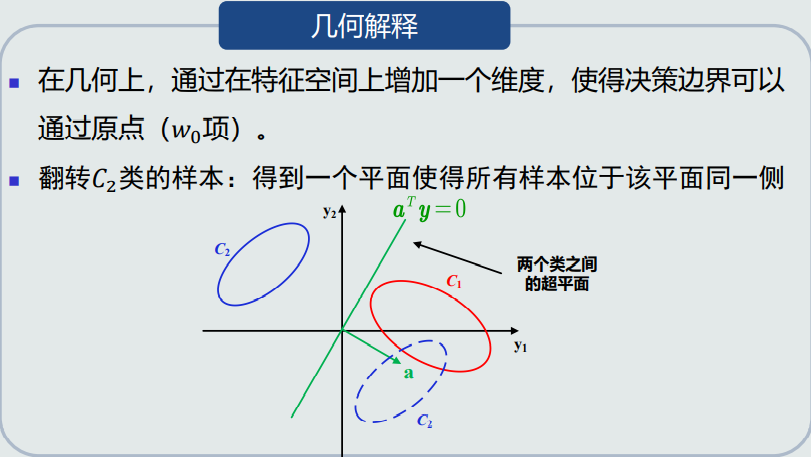
1.预处理

2.并行感知机
被错误分类的样本,输出值𝑓(𝒚𝑛)是负数。根据几何意义,输出值的绝对值越大,错误的程度越大。
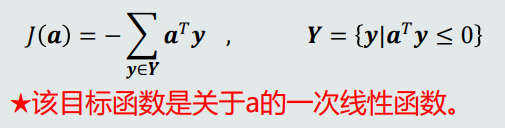
目标函数
针对所有被错误分类的训练样本(即输出值小于0的训练样本),其输出值取反求和:
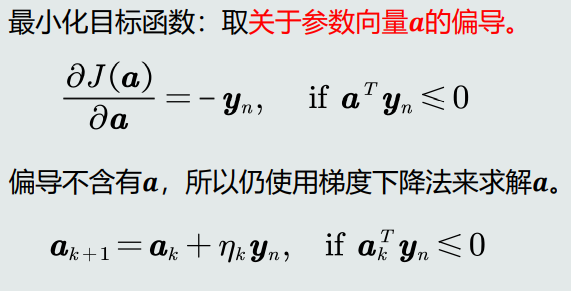
最小化该目标函数:取目标函数关于 𝒂 的偏导(即梯度)
偏导不含有 𝒂,所以不能简单的通过设置偏导为0来求解 𝒂。
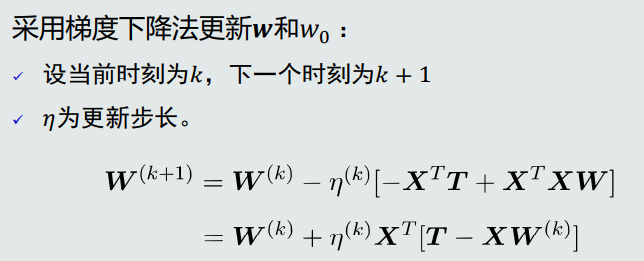
梯度下降法
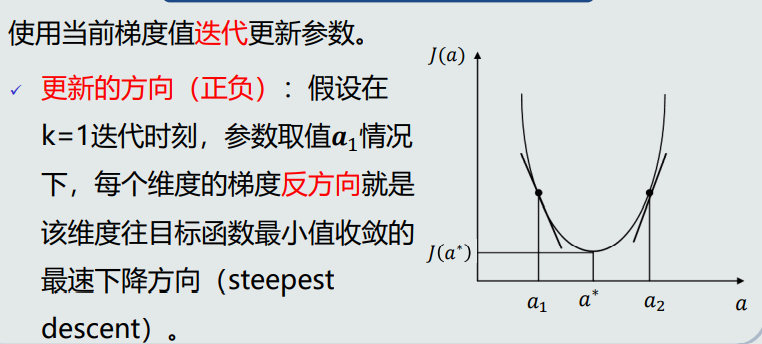
更新的大小:每个维度的梯度幅值代表参数在该维度上的更新程度。
通常加入步长(𝜂𝑘)来调整更新的幅度。每次迭代可以用不同的步长。
步长太大:可能找不到目标函数的最小值。
步长太小:迭代次数过多,不利于计算。
3.串行感知机
适用于:训练样本串行给出的情况。
目标函数

4.收敛性与最优解
如果训练样本是线性可分的,感知机(并行和串行)算法理论上收敛于一个解。
步长决定收敛的速度、以及是否收敛到局部或者全局最优点。
如果目标函数J(a)满足L-Lipschitz条件(对于任意a,存在一个常数L,使得|J(a)|<L成立),则步长𝜂 = 1/ 2𝐿 可确保收敛到局部最优点。
如果目标函数J(a)是凸函数,局部最优点就是全局最优点。
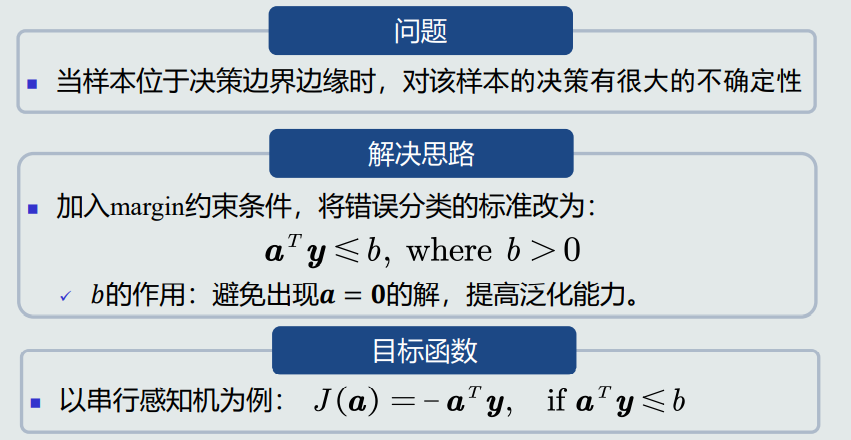
5.约束
三、Fisher线性判据

1.Fisher判据基本原理
找到一个最合适的投影轴,使两类样本在该轴上投影的重叠部分最少,从而使分类效果达到最佳。
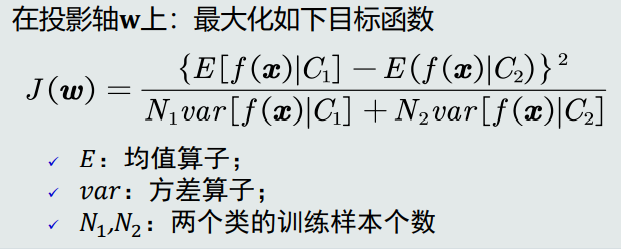
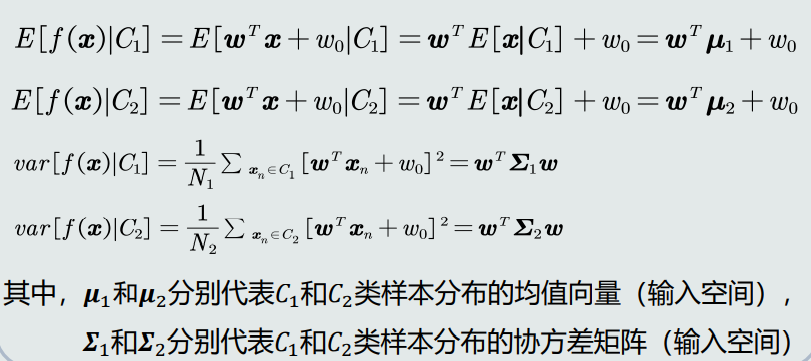
最佳标准之一:投影后,使得不同类别样本分布的类间差异尽可能大,同时使得各自类内样本分布的离散程度尽可能小。
类间样本的差异程度
用两类样本分布的均值之差度量。
类内样本的离散程度
用每类样本分布的协方差矩阵表征。
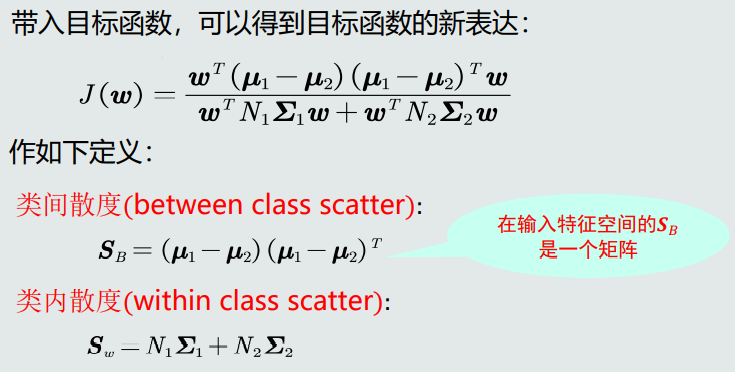
2.目标函数
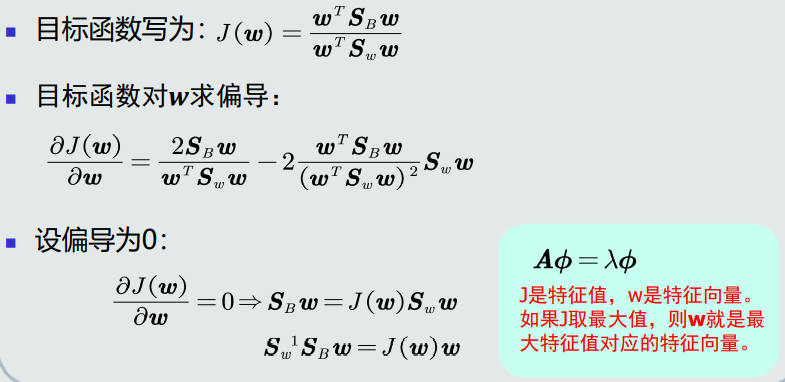
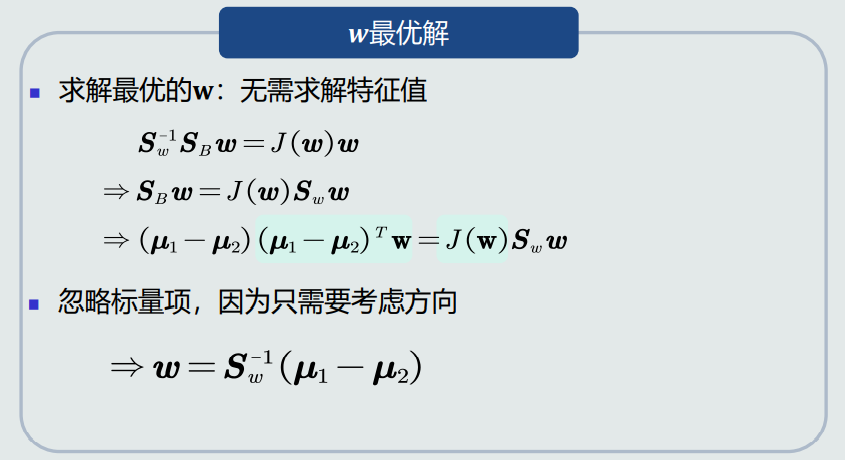
3.目标函数求解
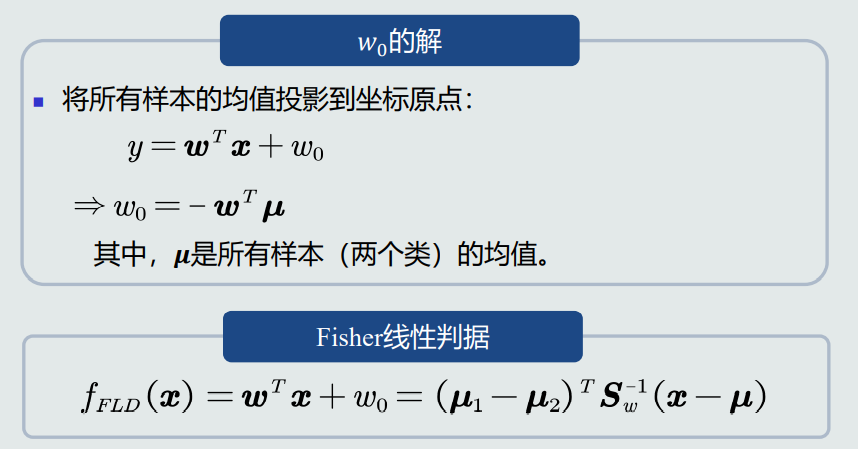
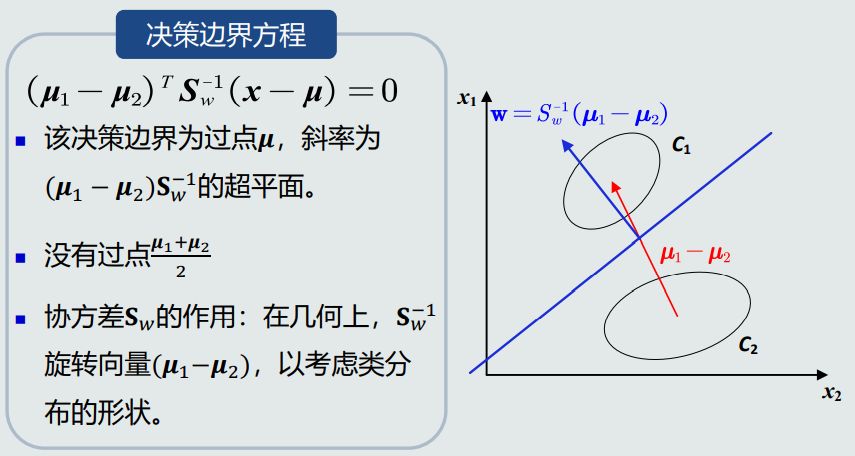
4.决策边界
四、支持向量机
1.设计思想
给定一组训练样本,使得两个类中与决策边界最近的训练样本到决策边界之间的间隔(离决策边界最近的训练样本到决策边界的垂直距离)最大。
2.支持向量

总间隔
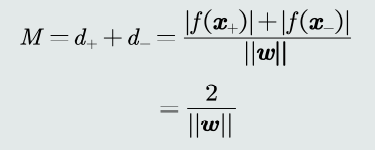
3.目标函数
支持向量机的目标:最大化总间隔。
最大化间隔,等价于最小化| 𝒘 |,所以目标函数设计为:
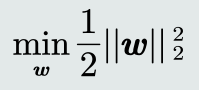

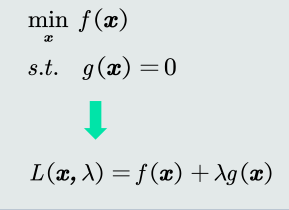
支持向量机的目标函数是一个条件优化问题。
拉格朗日乘数法是常用的解决该类问题的方法。
4.拉格朗日乘数法

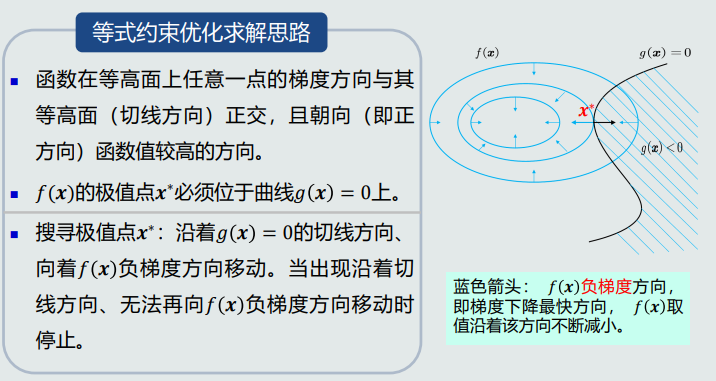
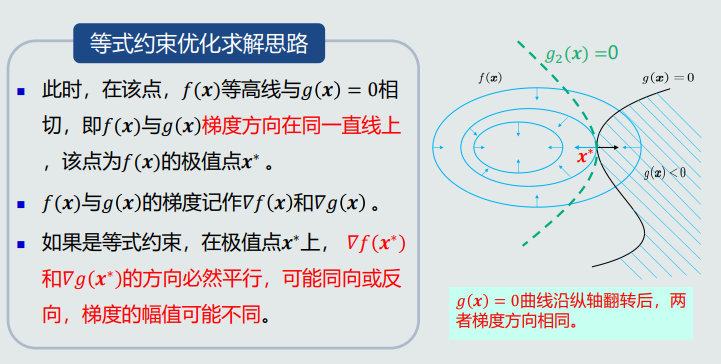
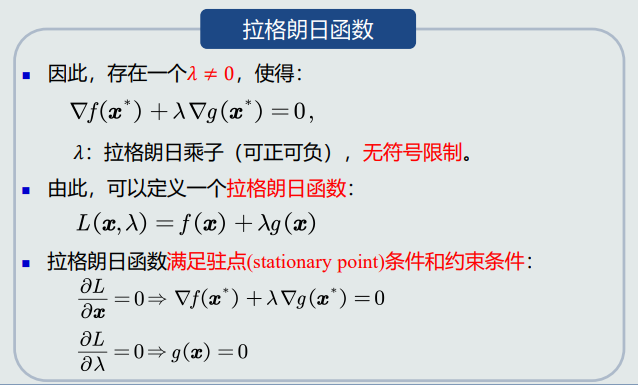
等式约束问题可以转换为等价的不带约束的优化问题
五、线性判据多类分类
多类分类的本质是非线性的,通过多个线性模型组合的途径实现多类分类。
1.One-to-all策略
假设每个类与剩余类线性可分。
对每个类单独训练一个分类器,𝐾个类需要训练𝐾个分类器,用于判别属于或不属于对应的类。
有时也可以只训练𝐾 − 1 个分类器:针对某个测试样本𝒙,如果所有𝐾 − 1个分类器都输出为非正值,则代表该样本属于剩余的第𝐾个类。
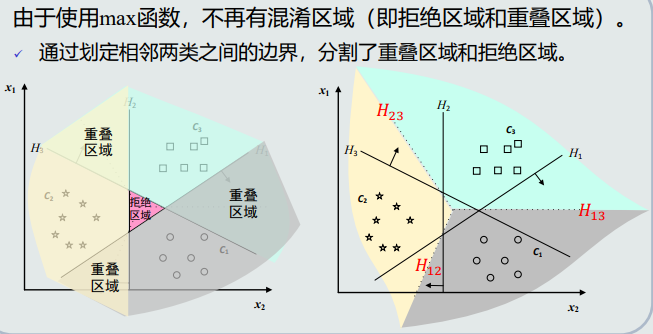
可能出现混淆区域:针对具体的某一个样本,该样本不属于任何一类(拒绝选项)或者属于多个类(重叠)的情况。
2.线性机
假设每个类与剩余类线性可分。
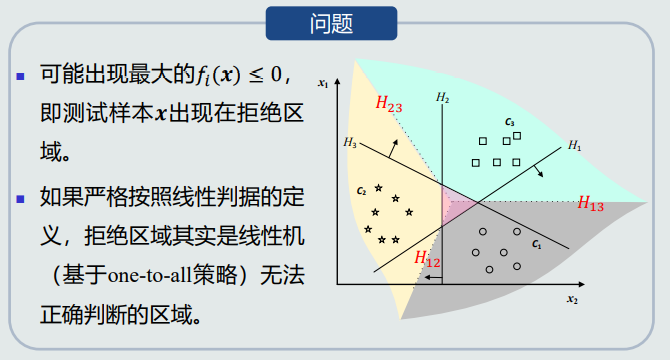
在One-to-all策略的分类器基础上,给定测试样本𝒙,其属于所有分类器中输出值最大的那个类。
输出值𝑓𝑖 (𝒙) 近似于𝒙 到分类边界(𝐶𝑖类与剩余类)的距离。该值最大即表示属于该类的可能性大。
输出值投票法(max函数)

线性机的决策过程相当于:将输入特征𝒙直接映射到类别标签𝑙。

线性机 = 𝐾个线性模型 + 一个max函数
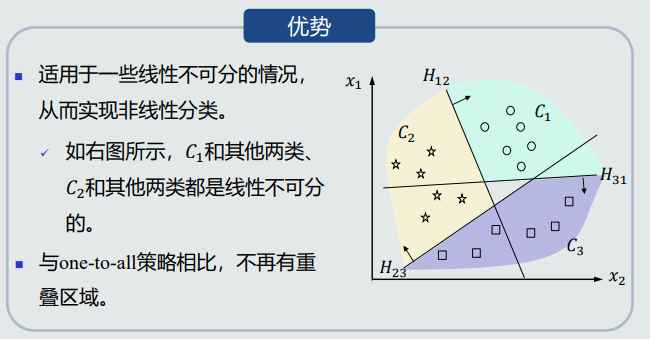
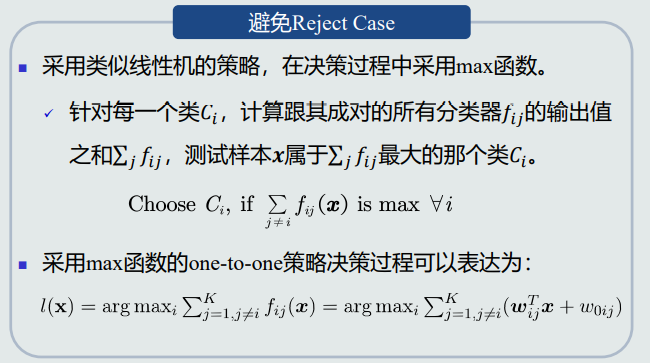
3.One-to-one策略
假设任意两个类之间线性可分,但每个类与剩余类可能是线性不可分的。
针对每两个类𝐶𝑖 和𝐶𝑗 ,训练一个线性分类器,总共需要训练𝐾(𝐾 − 1)/2个分类器。避免了one-to-all策略正负类样本个数不均衡的问题。
𝐶𝑖类与剩余类的决策边界:所有𝐻𝑖𝑗正半边的交集。

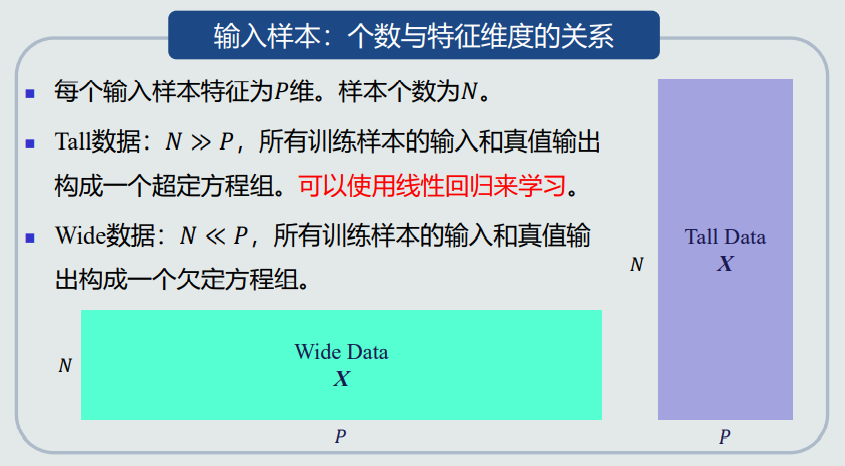
六、线性回归
输出的数据类型是连续的。
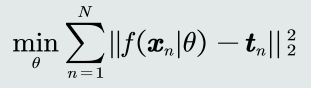
如果参数𝑾是最优的,意味着对每个样本(𝒙𝑛, 𝒕𝑛)而言,模型的输出值𝒚𝑛与标定的输出真值𝒕𝑛之间的差值最小。因此目标函数使用均方误差即最小化均方误差
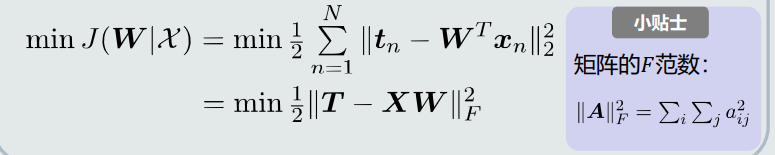
展开后

求偏导

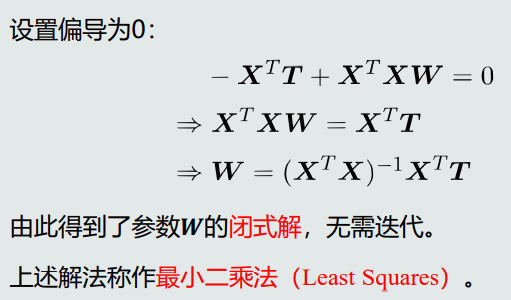
最小二乘法适用于Tall数据
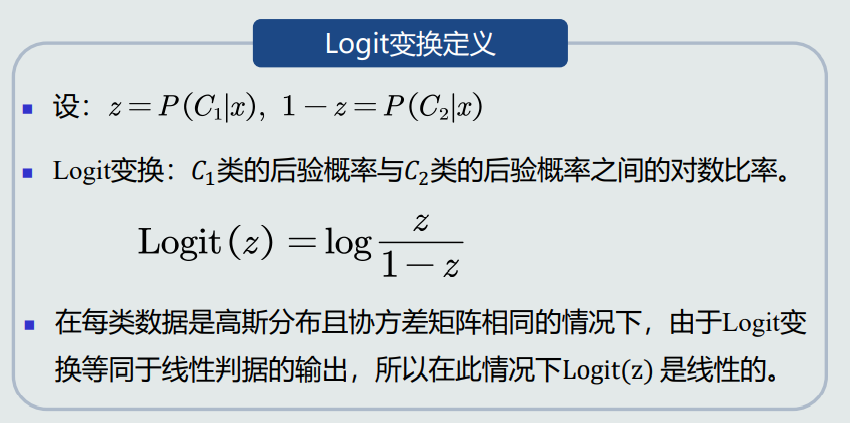
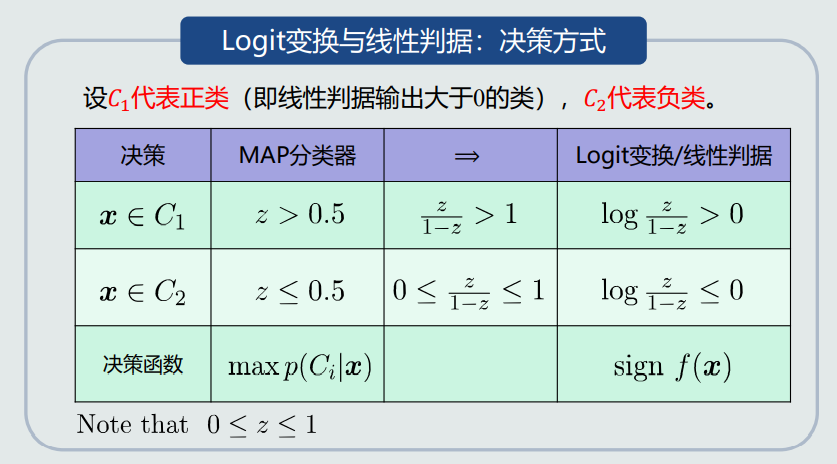
七、逻辑回归
1.Logit变换定义
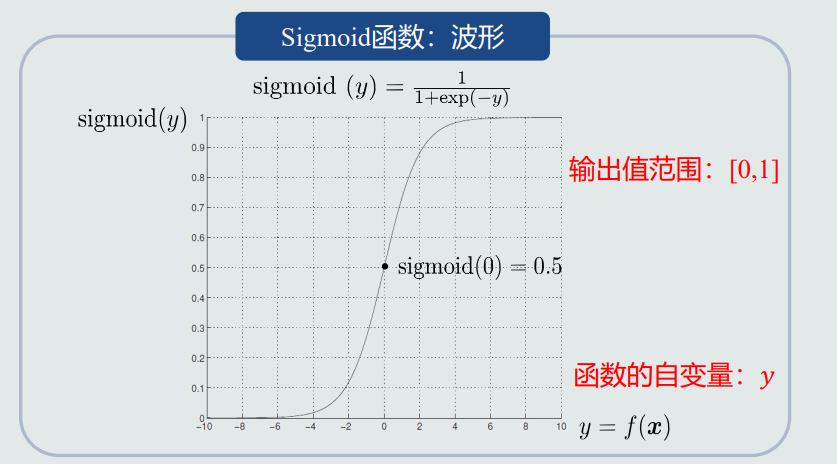
2.Sigmoid函数


3.逻辑回归
定义
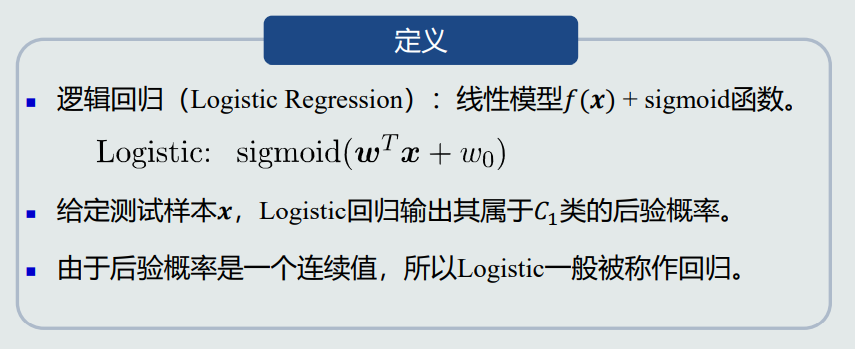
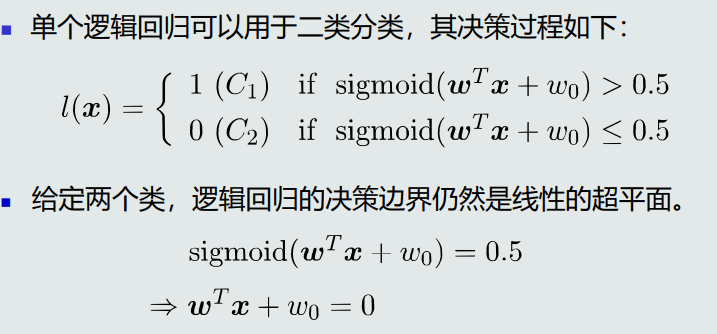
决策边界
单个逻辑回归就是一个神经元模型,激活函数是Sigmoid函数。
多个逻辑回归(即多个同层神经元)可应用于多类分类,使用max函数做决策(即基于one-to-all的线性机)。
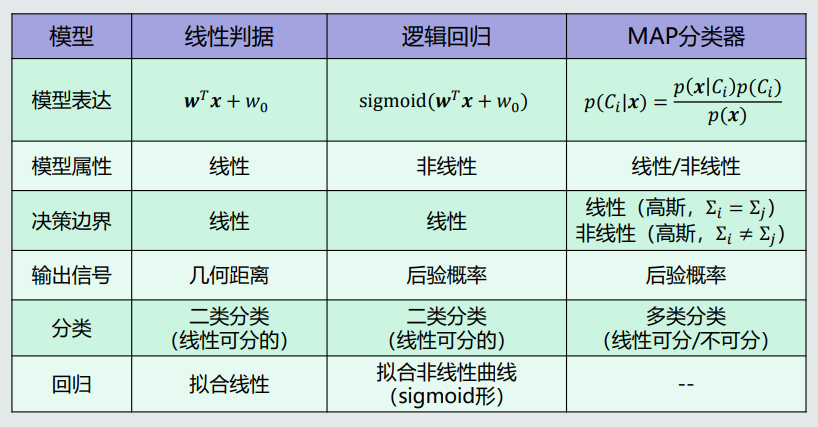
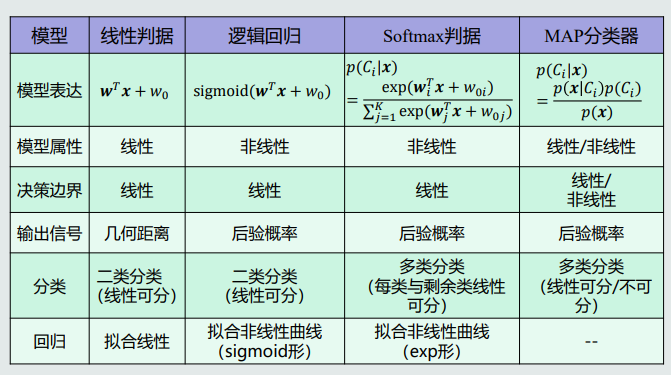
4.几种模型对比
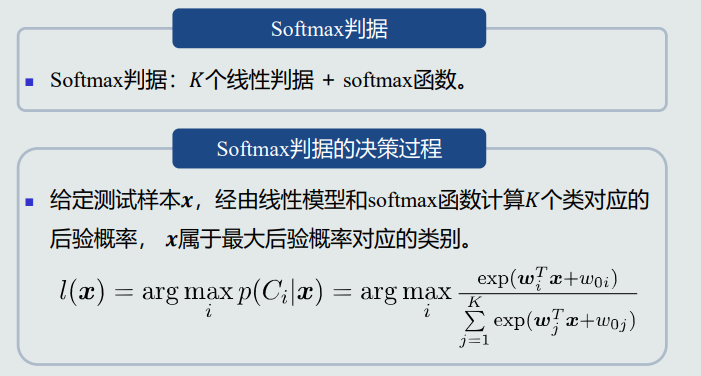
八、Softmax判据
单个模型实现多分类。
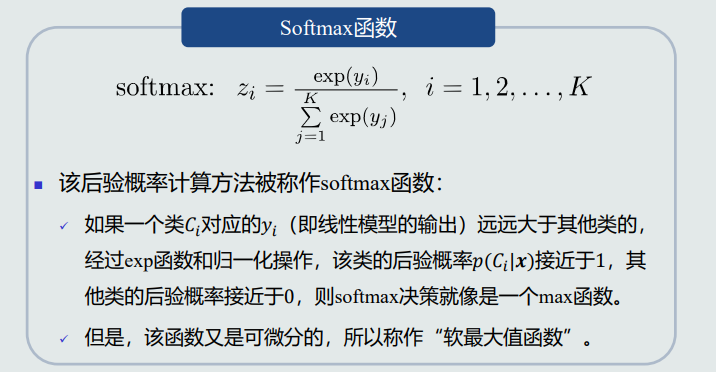
1.Softmax函数
2.Softmax判据
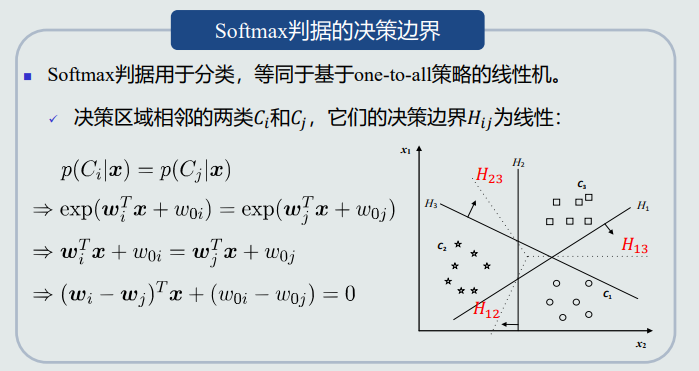
3.决策边界
4.对比
九、核支持向量机
1.基本思想
将线性不可分的样本通过一个函数𝜑映射到一个高维的特征空间(Φ空间)使得其线性可分
2.核函数
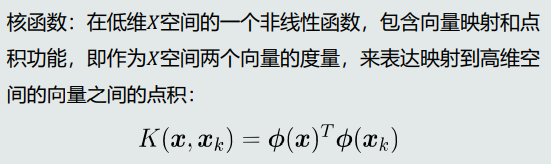
3.决策模型
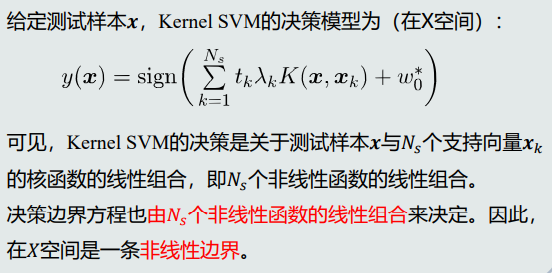
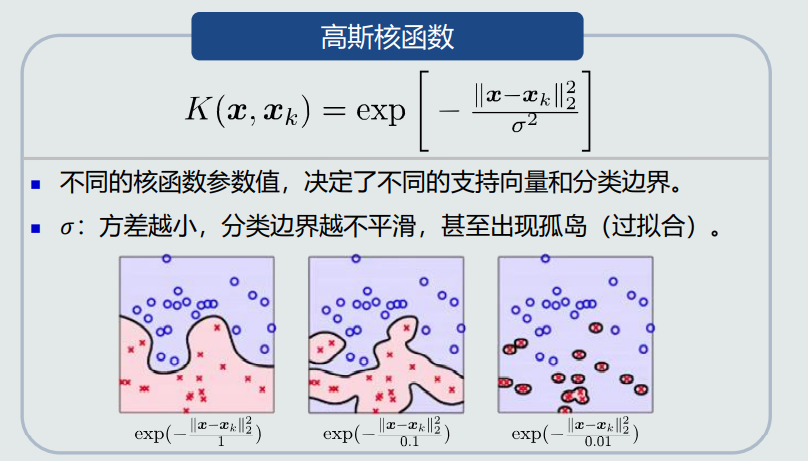
4.常见的核函数
Mercer条件:只要是半正定对称函数,都可以用作核函数。



 浙公网安备 33010602011771号
浙公网安备 33010602011771号