SLAM十四讲作业2

熟悉 Eigen 矩阵运算
5. 编程实现 A 为 100 * 100 随机矩阵时,⽤ QR 和 Cholesky 分解求 x 的程序
QR分解代码:
#include <iostream>
using namespace std;
#include <ctime>
// Eigen 部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
// Eigen 固定⼤⼩矩阵最⼤⽀持到50
#define MATRIX_SIZE 50
const int N = 100;
int main(){
// 矩阵大小超过50,使用动态矩阵
Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > A;
Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > Q,R;
Eigen::HouseholderQR<Eigen::MatrixXd> QR;
A = Eigen::MatrixXd::Random(N,N);
QR.compute(A);
Q = QR.householderQ();
R = QR.matrixQR().triangularView<Eigen::Upper>();
cout << "QR2(): HouseholderQR-----------------------------------"<< std::endl;
//cout << "A "<< endl <<A << endl << endl;
//cout << "Q "<< endl <<Q << endl << endl;
//cout << "R "<< endl <<R << endl << endl;
return 0;
}
Cholesky 分解
#include <iostream>
#include <cstdlib>
#include <ctime>
#include <time.h>
using namespace std;
// Eigen 部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
// LLT LDLT
#include <Eigen/Cholesky>
using namespace Eigen;
// Eigen 固定⼤⼩矩阵最⼤⽀持到50
#define MATRIX_SIZE 50
const int N = 100;
int main(){
cout<<"----------------way1----------------"<<endl;
// 用A = LLt 生成元素都为正的下三角矩阵即可生成随机正定矩阵
Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > U;
U = Eigen::MatrixXd::Random(N,N);
for(int i=0;i<N;i++){
for(int j=i;j<N;j++){
if(U(i,j)<=0){
U(i,j) = -U(i,j) + 1;
}
}
for(int j=0;j<i;j++){
U(i,j)=0;
}
}
cout << U << endl;
Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > L = U.transpose();
cout <<"--------L--------"<<endl;
cout<<L<<endl;
Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > A = L*U;
cout <<"--------A--------"<<endl;
cout<<A<<endl;
LLT<MatrixXd> lltOfA(A); // compute the Cholesky decomposition of A
MatrixXd Lcal = lltOfA.matrixL();
cout <<"--------计算出来的L--------"<<endl;
cout<<Lcal<<endl;
cout<<"----------------way2----------------"<<endl;
Matrix< double, Eigen::Dynamic, Eigen::Dynamic > X,Xsym,A2;
X = MatrixXd::Random(N,N);
Xsym = (X+X.transpose());
Matrix< double, Eigen::Dynamic, Eigen::Dynamic > I = MatrixXd::Identity(N, N);
A2 = Xsym + N*I;
cout <<"--------计算出来的A2--------"<<endl;
cout<<A2<<endl;
LLT<MatrixXd> lltOfA2(A2); // compute the Cholesky decomposition of A
MatrixXd Lcal2 = lltOfA2.matrixL();
cout <<"--------计算出来的L2--------"<<endl;
cout<<Lcal2<<endl;
cout <<"--------验证A2--------"<<endl;
cout<<Lcal2*Lcal2.transpose()<<endl;
return 0;
}
几何运算练习
key : 使⽤Eigen/Geometry
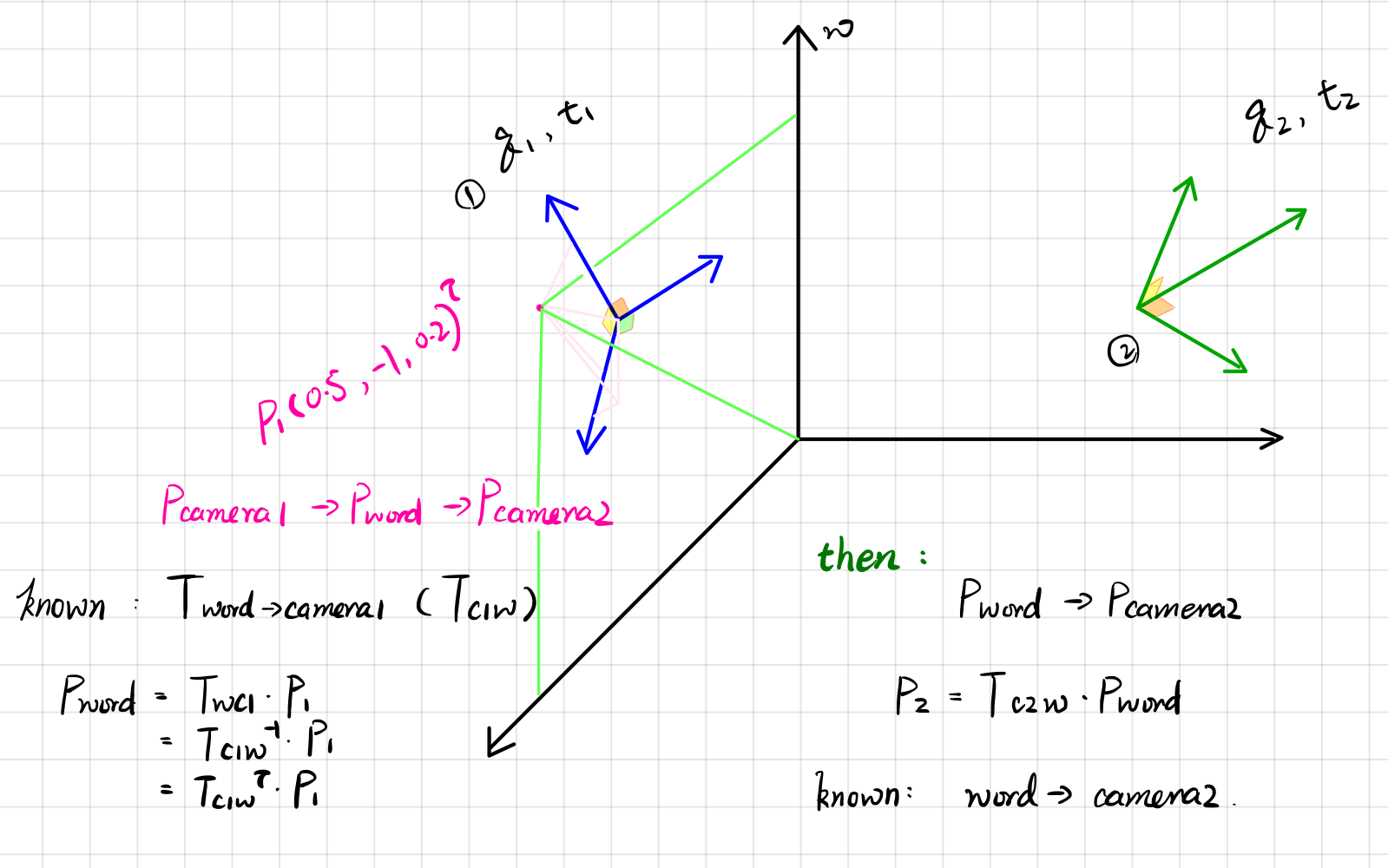
设有⼩萝⼘⼀号和⼩萝⼘⼆号位于世界坐标系中。
⼩萝⼘⼀号的位姿为:\(q1 = [0.55, 0.3, 0.2, 0.2]; t1 =[0.7, 1.1, 0.2]^T\)(q 的第⼀项为实部)。这⾥的q 和t 表达的是\(T_{cw}\),也就是世界到相机的变换关系。
⼩萝⼘⼆号的位姿为 \(q2 = [-0.1, 0.3,-0.7, 0.2]; t2 = [-0.1, 0.4, 0.8]^T\) 。
现在,⼩萝⼘⼀号看到某个点在⾃⾝的坐标系下,坐标为 \(p1 = [0.5, -0.1, 0.2]^T\),求该向量在⼩萝⼘⼆号坐标系下的坐标。请编程实现。
欧式群
\[\operatorname{SE}(3)=\left\{\boldsymbol{T}=\left[\begin{array}{cc}\boldsymbol{R} & \boldsymbol{t} \\ \mathbf{0}^{\mathrm{T}} & 1\end{array}\right] \in \mathbb{R}^{4 \times 4} \mid \boldsymbol{R} \in \operatorname{SO}(3), \boldsymbol{t} \in \mathbb{R}^{3}\right\}
\]
注 :
- 四元数在使⽤前需要归⼀化
#include <iostream>
#include <cstdlib>
#include <ctime>
#include <time.h>
using namespace std;
// Eigen 部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
// LLT LDLT
#include <Eigen/Cholesky>
// 几何运算
#include<Eigen/Geometry>
using namespace Eigen;
int main(){
Quaterniond q1(0.55,0.3,0.2,0.2);//定义四元数Q1
Quaterniond q2(-0.1,0.3,-0.7,0.2);
// 归一化
q1.normalize();
q2.normalize();
Vector3d t1(0.7,1.1,0.2),t2(-0.1,0.4,0.8),p1(0.5,-0.1,0.2);// Vector3d 实质上是 Eigen::Matrix<double, 3, 1>
Isometry3d T_c1w= Isometry3d::Identity();// word -> camera1
Isometry3d T_c2w= Isometry3d::Identity();// word -> camera2
T_c1w.rotate(q1.toRotationMatrix());//四元数转化为旋转矩阵
T_c1w.pretranslate ( t1 );
// cout<<T_cw1.matrix() << "\n";
T_c2w.rotate(q2.toRotationMatrix());//四元数转化为旋转矩阵
T_c2w.pretranslate ( t2 );
Vector3d p_word;
p_word = T_c1w.inverse()*p1;
// cout << p_word<< "\n";
Vector3d p2;
p2 = T_c2w*p_word;
cout << p2 << endl;
return 0;
}
旋转的表达
课程中提到了旋转可以⽤旋转矩阵、旋转向量与四元数表达,其中旋转矩阵与四元数是⽇常应⽤中常见的表达⽅式。
完成下述内容的证明。
- 设有旋转矩阵\(R\),证明\(R^TR = I\)且 \(det(R) = +1\)
- 设有四元数 \(q\),我们把虚部记为\(\varepsilon\),实部记为 \(\eta\),那么 \(q = (\varepsilon , \eta)\)。请说明 \(\varepsilon\) 和 \(\eta\) 的维度。
- 定义运算 + 和 \(\oplus\)为:
\[q^{+}=\left[\begin{array}{cc}
\eta 1+\varepsilon^{\times} & \varepsilon \\
-\varepsilon^{\mathrm{T}} & \eta
\end{array}\right], \quad \boldsymbol{q}^{\oplus}=\left[\begin{array}{cc}
\eta \mathbf{1}-\varepsilon^{\times} & \varepsilon \\
-\varepsilon^{\mathrm{T}} & \eta
\end{array}\right]
\]
其中运算 \(\times\)含义与 ^ 相同,即取 \(\varepsilon\) 的反对称矩阵(它们都成叉积的矩阵运算形式),\(1\) 为单位矩
阵。
证明对任意单位四元数 \(q_1, q_2\),四元数乘法可写成矩阵乘法:
\[q_1q_2 = q_1^{+}q_2
\]
或者
\[q_1q_2 = q_2^{\oplus}q_1
\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号