

《DSP using MATLAB》Problem 8.10
代码:
%% ------------------------------------------------------------------------
%% Output Info about this m-file
fprintf('\n***********************************************************\n');
fprintf(' <DSP using MATLAB> Problem 8.10 \n\n');
banner();
%% ------------------------------------------------------------------------
%a0 = 0.90;
%a0 = 0.95;
a0 = 0.99;
% digital iir 1st-order allpass filter
b = [a0 1];
a = [1 a0];
figure('NumberTitle', 'off', 'Name', 'Problem 8.10 Pole-Zero Plot')
set(gcf,'Color','white');
zplane(b,a);
title(sprintf('Pole-Zero Plot, r=%.2f',a0));
%pzplotz(b,a);
[db, mag, pha, grd, w] = freqz_m(b, a);
% ---------------------------------------------------------------------
% Choose the gain parameter of the filter, maximum gain is equal to 1
% ---------------------------------------------------------------------
gain1=max(mag) % with poles
K = 1
[db, mag, pha, grd, w] = freqz_m(K*b, a);
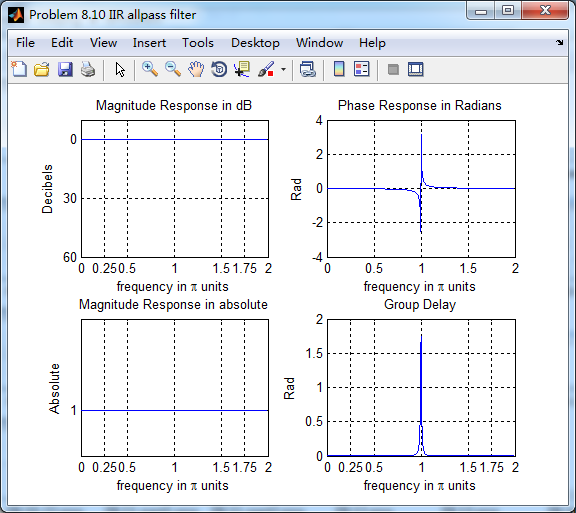
figure('NumberTitle', 'off', 'Name', 'Problem 8.10 IIR allpass filter')
set(gcf,'Color','white');
subplot(2,2,1); plot(w/pi, db); grid on; axis([0 2 -60 10]);
set(gca,'YTickMode','manual','YTick',[-60,-30,0])
set(gca,'YTickLabelMode','manual','YTickLabel',['60';'30';' 0']);
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude Response in dB');
subplot(2,2,3); plot(w/pi, mag); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Absolute'); title('Magnitude Response in absolute');
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
set(gca,'YTickMode','manual','YTick',[0,1.0]);
subplot(2,2,2); plot(w/pi, pha); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Phase Response in Radians');
subplot(2,2,4); plot(w/pi, grd*pi/180); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Group Delay');
set(gca,'XTickMode','manual','XTick',[0,0.25,0.5,1,1.5,1.75,2]);
%set(gca,'YTickMode','manual','YTick',[0,1.0]);
figure('NumberTitle', 'off', 'Name', 'Problem 8.10 IIR allpass filter')
set(gcf,'Color','white');
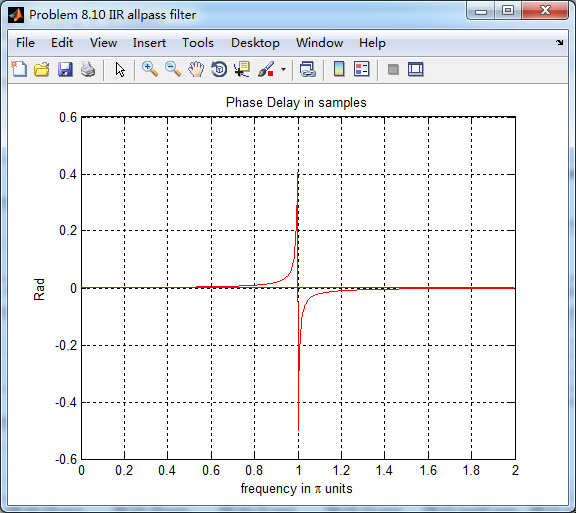
plot(w/pi, -pha/w); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Phase Delay in samples');
% Impulse Response
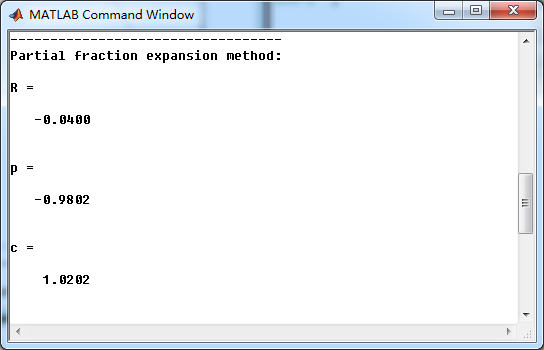
fprintf('\n----------------------------------');
fprintf('\nPartial fraction expansion method: \n');
[R, p, c] = residuez(K*b,a)
MR = (abs(R))' % Residue Magnitude
AR = (angle(R))'/pi % Residue angles in pi units
Mp = (abs(p))' % pole Magnitude
Ap = (angle(p))'/pi % pole angles in pi units
[delta, n] = impseq(0,0,50);
h_chk = filter(K*b,a,delta); % check sequences
% ------------------------------------------------------------------------------------------------
% gain parameter K
% ------------------------------------------------------------------------------------------------
%h = -0.2111 * ((-0.9) .^ n) + 1.1111 * delta; %r=0.90
%h = -0.1026 * ((-0.95) .^ n) + 1.0526 * delta; %r=0.95
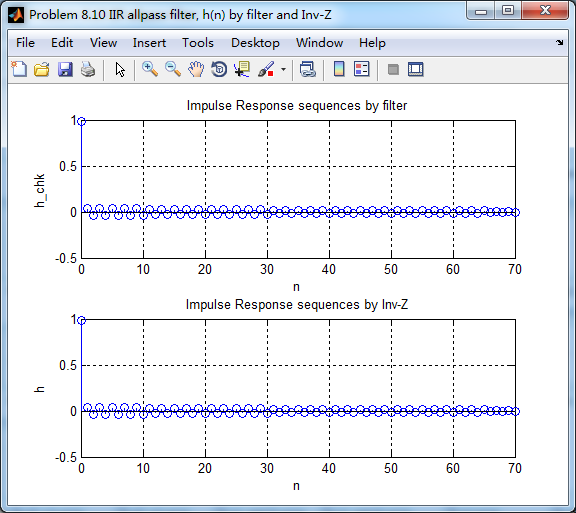
h = -0.0201 * ((-0.99) .^ n) + 1.0101 * delta; %r=0.99
% ------------------------------------------------------------------------------------------------
figure('NumberTitle', 'off', 'Name', 'Problem 8.10 IIR allpass filter, h(n) by filter and Inv-Z ')
set(gcf,'Color','white');
subplot(2,1,1); stem(n, h_chk); grid on; %axis([0 2 -60 10]);
xlabel('n'); ylabel('h\_chk'); title('Impulse Response sequences by filter');
subplot(2,1,2); stem(n, h); grid on; %axis([0 1 -100 10]);
xlabel('n'); ylabel('h'); title('Impulse Response sequences by Inv-Z');
[db, mag, pha, grd, w] = freqz_m(h, 1);
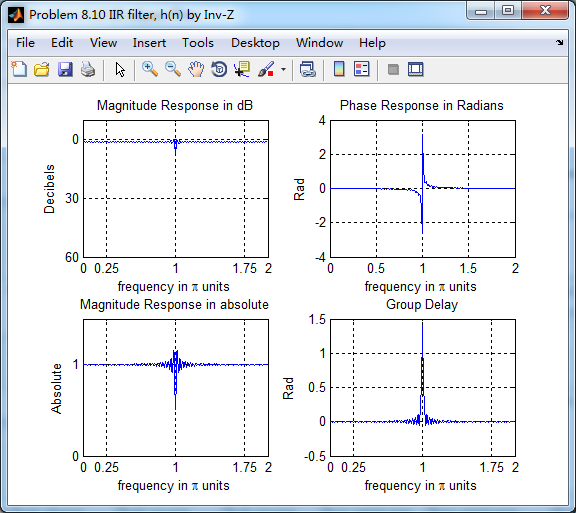
figure('NumberTitle', 'off', 'Name', 'Problem 8.10 IIR filter, h(n) by Inv-Z ')
set(gcf,'Color','white');
subplot(2,2,1); plot(w/pi, db); grid on; axis([0 2 -60 10]);
set(gca,'YTickMode','manual','YTick',[-60,-30,0])
set(gca,'YTickLabelMode','manual','YTickLabel',['60';'30';' 0']);
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude Response in dB');
subplot(2,2,3); plot(w/pi, mag); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Absolute'); title('Magnitude Response in absolute');
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
set(gca,'YTickMode','manual','YTick',[0,1.0]);
subplot(2,2,2); plot(w/pi, pha); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Phase Response in Radians');
subplot(2,2,4); plot(w/pi, grd*pi/180); grid on; %axis([0 1 -100 10]);
xlabel('frequency in \pi units'); ylabel('Rad'); title('Group Delay');
set(gca,'XTickMode','manual','XTick',[0,0.25,1,1.75,2]);
%set(gca,'YTickMode','manual','YTick',[0,1.0]);
运行结果:
第1、2小题的图这里不放了。
相位延迟phase-delay为0.01时对应的a 的值0.9802
此时1阶全通系统的留数、极点为
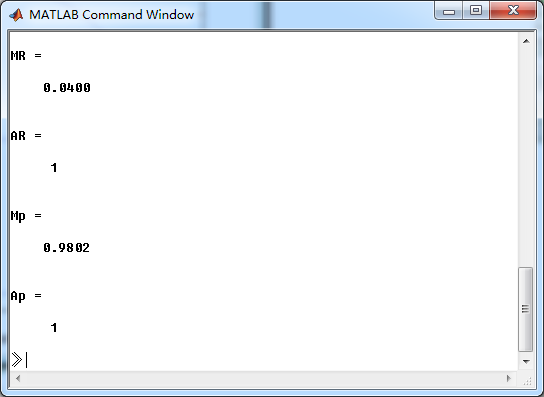
系统零极点图
该系统部分分式展开后,求逆z变换得脉冲响应
由下图知,两种方法得到的系统脉冲响应h的幅度谱、相位谱、群延迟大致类似(ω=π时不同)。
牢记:
1、如果你决定做某事,那就动手去做;不要受任何人、任何事的干扰。2、这个世界并不完美,但依然值得我们去为之奋斗。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号