Quoit Design
以下为本题用到的算法
概述
给定 \(n\) 个二维平面上的点,求一组欧几里得距离最近的点对。
下面我们介绍一种时间复杂度为 \(O(n\log n)\) 的分治算法来解决这个问题。该算法在 1975 年由 Franco P. Preparata 提出,Preparata 和 Michael Ian Shamos 证明了该算法在决策树模型下是最优的。
算法
与常规的分治算法一样,我们将这个有 \(n\) 个点的集合拆分成两个大小相同的集合 \(S_1, S_2\),并不断递归下去。但是我们遇到了一个难题:如何合并?即如何求出一个点在 \(S_1\) 中,另一个点在 \(S_2\) 中的最近点对?这里我们先假设合并操作的时间复杂度为 \(O(n)\),可知算法总复杂度为 \(T(n) = 2T(\frac{n}{2}) + O(n) = O(n\log n)\)。
我们先将所有点按照 \(x_i\) 为第一关键字、\(y_i\) 为第二关键字排序,并以点 \(p_m (m = \lfloor \frac{n}{2} \rfloor)\) 为分界点,拆分点集为 \(A_1,A_2\):
并递归下去,求出两点集各自内部的最近点对,设距离为 \(h_1,h_2\),取较小值设为 \(h\)。
现在该合并了!我们试图找到这样的一组点对,其中一个属于 \(A_1\),另一个属于 \(A_2\),且二者距离小于 \(h\)。因此我们将所有横坐标与 \(x_m\) 的差小于 \(h\) 的点放入集合 \(B\):
结合图像,直线 \(m\) 将点分成了两部分。\(m\) 左侧为 \(A_1\) 点集,右侧为为 \(A_2\) 点集。
再根据 \(B = \{ p_i \ \big | \ \lvert x_i - x_m \rvert < h \}\) 规则,得到绿色点组成的 \(B\) 点集。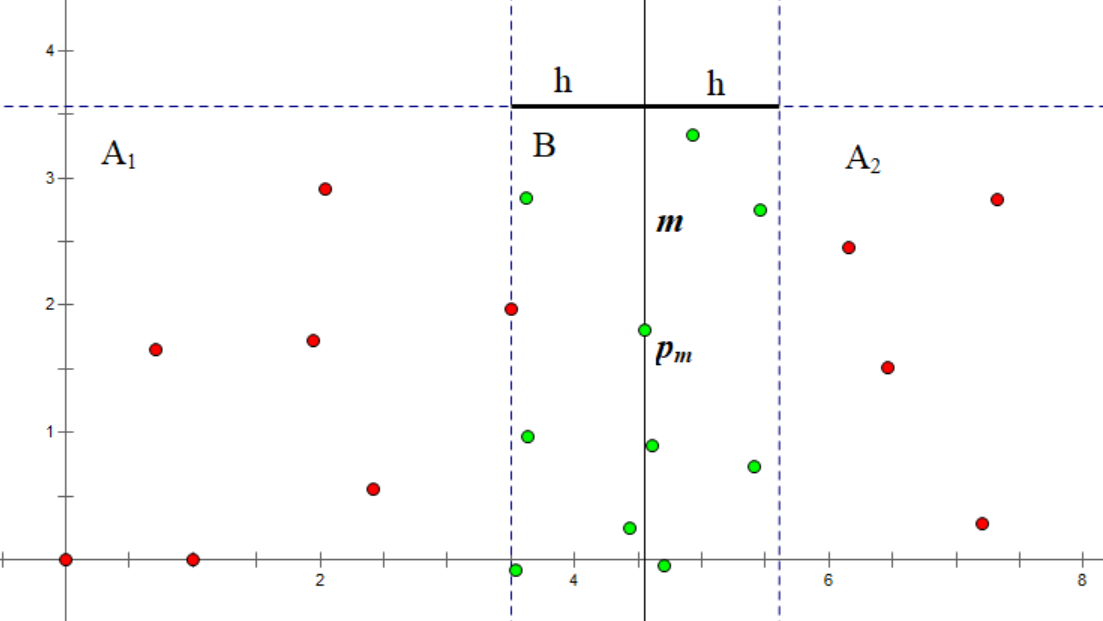
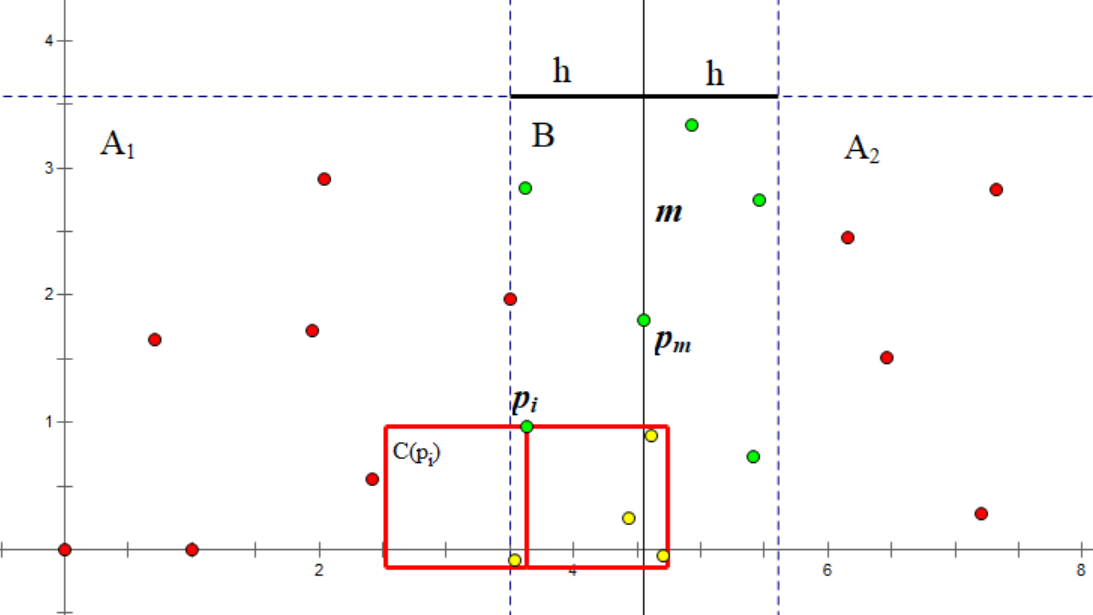
对于 \(B\) 中的每个点 \(p_i\),我们当前目标是找到一个同样在 \(B\) 中、且到其距离小于 \(h\) 的点。为了避免两个点之间互相考虑,我们只考虑那些纵坐标小于 \(y_i\) 的点。显然对于一个合法的点 \(p_j\),\(y_i - y_j\) 必须小于 \(h\)。于是我们获得了一个集合 \(C(p_i)\):
在点集 \(B\) 中选一点 \(p_i\),根据 \(C(p_i) = \{ p_j\ \big |\ p_j \in B,\ y_i - h < y_j \le y_i \}\) 的规则,得到了由红色方框内的黄色点组成的 \(C\) 点集。
如果我们将 \(B\) 中的点按照 \(y_i\) 排序,\(C(p_i)\) 将很容易得到,即紧邻 \(p_i\) 的连续几个点。
由此我们得到了合并的步骤:
- 构建集合 \(B\)。
- 将 \(B\) 中的点按照 \(y_i\) 排序。通常做法是 \(O(n\log n)\),但是我们可以改变策略优化到 \(O(n)\)(下文讲解)。
- 对于每个 \(p_i \in B\) 考虑 \(p_j \in C(p_i)\),对于每对 \((p_i,p_j)\) 计算距离并更新答案(当前所处集合的最近点对)。
注意到我们上文提到了两次排序,因为点坐标全程不变,第一次排序可以只在分治开始前进行一次。我们令每次递归返回当前点集按 \(y_i\) 排序的结果,对于第二次排序,上层直接使用下层的两个分别排序过的点集归并即可。
似乎这个算法仍然不优,\(|C(p_i)|\) 将处于 \(O(n)\) 数量级,导致总复杂度不对。其实不然,其最大大小为 \(7\),我们给出它的证明:
复杂度证明
我们已经了解到,\(C(p_i)\) 中的所有点的纵坐标都在 \((y_i-h,y_i]\) 范围内;且 \(C(p_i)\) 中的所有点,和 \(p_i\) 本身,横坐标都在 \((x_m-h,x_m+h)\) 范围内。这构成了一个 \(2h \times h\) 的矩形。
我们再将这个矩形拆分为两个 \(h \times h\) 的正方形,不考虑 \(p_i\),其中一个正方形中的点为 \(C(p_i) \cap A_1\),另一个为 \(C(p_i) \cap A_2\),且两个正方形内的任意两点间距离大于 \(h\)。(因为它们来自同一下层递归)
我们将一个 \(h \times h\) 的正方形拆分为四个 \(\frac{h}{2} \times \frac{h}{2}\) 的小正方形。可以发现,每个小正方形中最多有 \(1\) 个点:因为该小正方形中任意两点最大距离是对角线的长度,即 \(\frac{h}{\sqrt 2}\),该数小于 \(h\)。
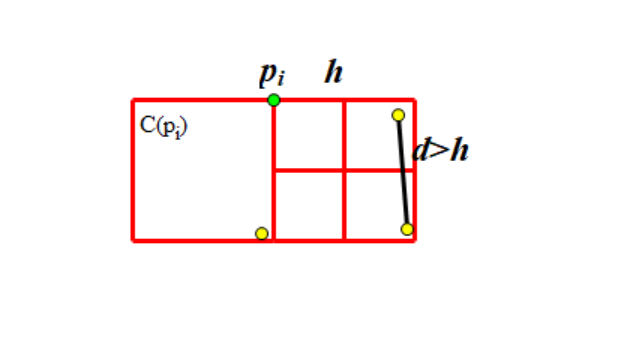
由此,每个正方形中最多有 \(4\) 个点,矩形中最多有 \(8\) 个点,去掉 \(p_i\) 本身,\(\max(C(p_i))=7\)。
#include<bits/stdc++.h>
using namespace std;
struct point
{
double x,y;
int id;
};
vector<point>a,t;
double midsdis;
int ansa,ansb;
bool cmp_x(const point &a,const point &b)
{
return a.x<b.x||(a.x==b.x&&a.y<b.y);
}
bool cmp_y(const point &a,const point &b)
{
return a.y<b.y;//不关注x坐标
}
void up_ans(const point &a,const point &b)//更新答案
{
//点对的距离
double dis=sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
if(dis<midsdis)
midsdis=dis,ansa=a.id,ansb=b.id;//ans与id是更新点对
}
void divi(int l,int r)
{
//1、先写边界条件
if(r-l<=3){//此时可以暴力跑出最短点对
for(int i=l;i<r;i++)
for(int j=i+1;j<=r;j++)
up_ans(a[i],a[j]);
sort(a.begin()+l,a.begin()+r,cmp_y);//!!!
return;
}
//2、 开始分治,去触及最小/边界条件
int mid=(l+r)>>1;
int midx=a[mid].x;
divi(l,mid);
divi(mid,r);
//合并答案
//merge()把两个有序的数列合并,copy()是把他放回去
merge(a.begin()+l,a.begin()+mid,a.begin()+mid,a.begin()+r,t.begin(),cmp_y) ;//正常使用5个参数,表示结构体大小,再加一个参数
copy(t.begin(),t.begin()+r-l,a.begin()+l);
int tsz=0;
for(int i=l;i<r;i++){
if(fabs(a[i].x-midx)<midsdis)//小于中线的位置
{
for(int j=tsz-1;j>=0&&a[i].y-t[j].y<midsdis;j--){
up_ans(a[i],t[j]);
}
t[tsz++]=a[i];
}
}
}
int main()
{
int n;
while(~scanf("%d",&n)&&n!=0)
{
if(n==1)
{
double xx,yy;
scanf("%lf %lf",&xx,&yy);
printf("0\n");
continue;
}
else
{
a.clear();
t.clear();
for(int i=0;i<n;i++)
{
point p;
double xx,yy;
scanf("%lf %lf",&xx,&yy);
p.x=xx;
p.y=yy;
p.id=i;
a.push_back(p);
}
sort(a.begin(),a.end(),cmp_x);
midsdis=1e20;
t.resize(n);//给t分配n个空间
divi(0,n-1);
printf("%.2f\n",midsdis/2.0);
}
}
return 0;
}
本文来自hrbust hzy,侵删。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号