人形机器人的二次开发
一、环境配置
1.远程连接
VNC Server
2.文件传输
Winscp
sudo apt-get update 更新源
sudo apt-get upgrade 更新已安装的包
3.vim优化配置
https://blog.csdn.net/lixingfu1009/article/details/80996713
cd /usr/share/vim/ ls sudo nano vimrc "制表符为4 set tabstop=4 "为C程序提供自动缩进 set smartindent
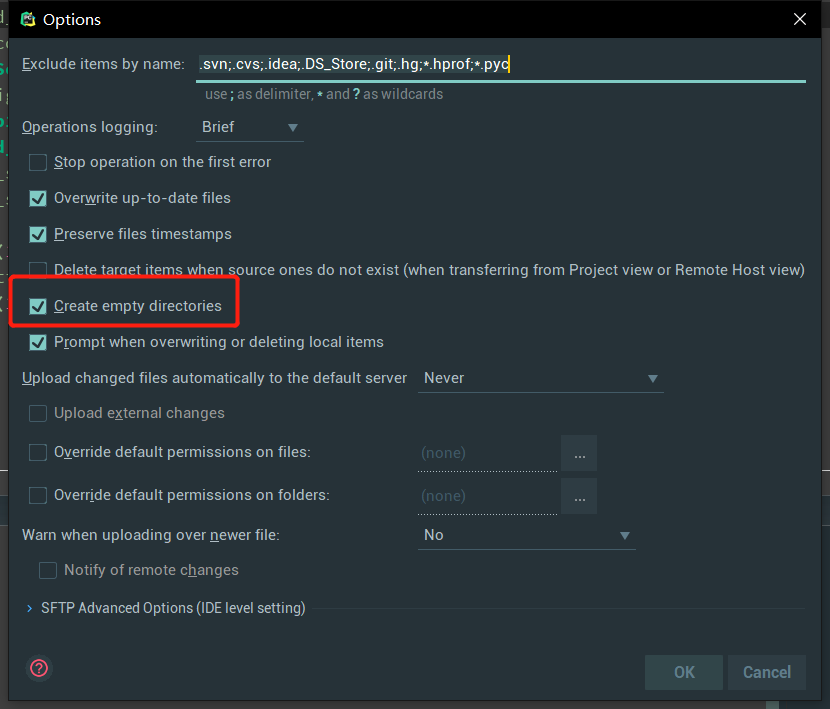
4.Pycharm跨平台开发
https://www.bilibili.com/video/av23537731
联机配置:

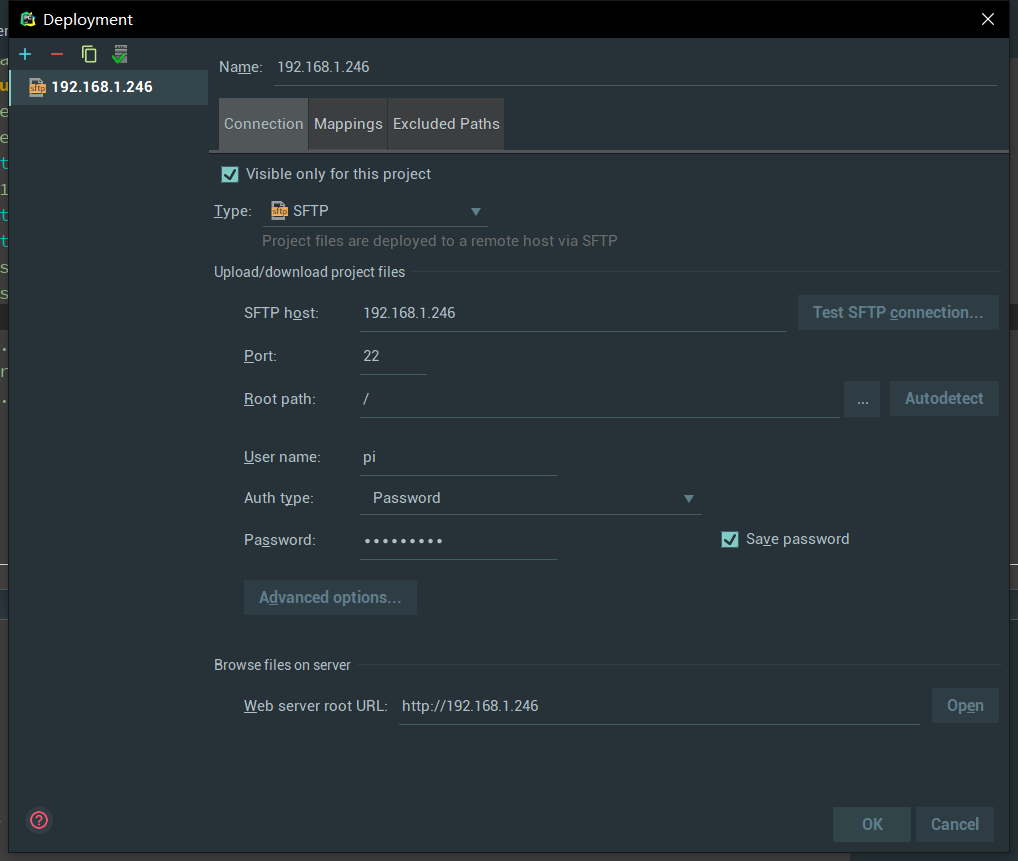
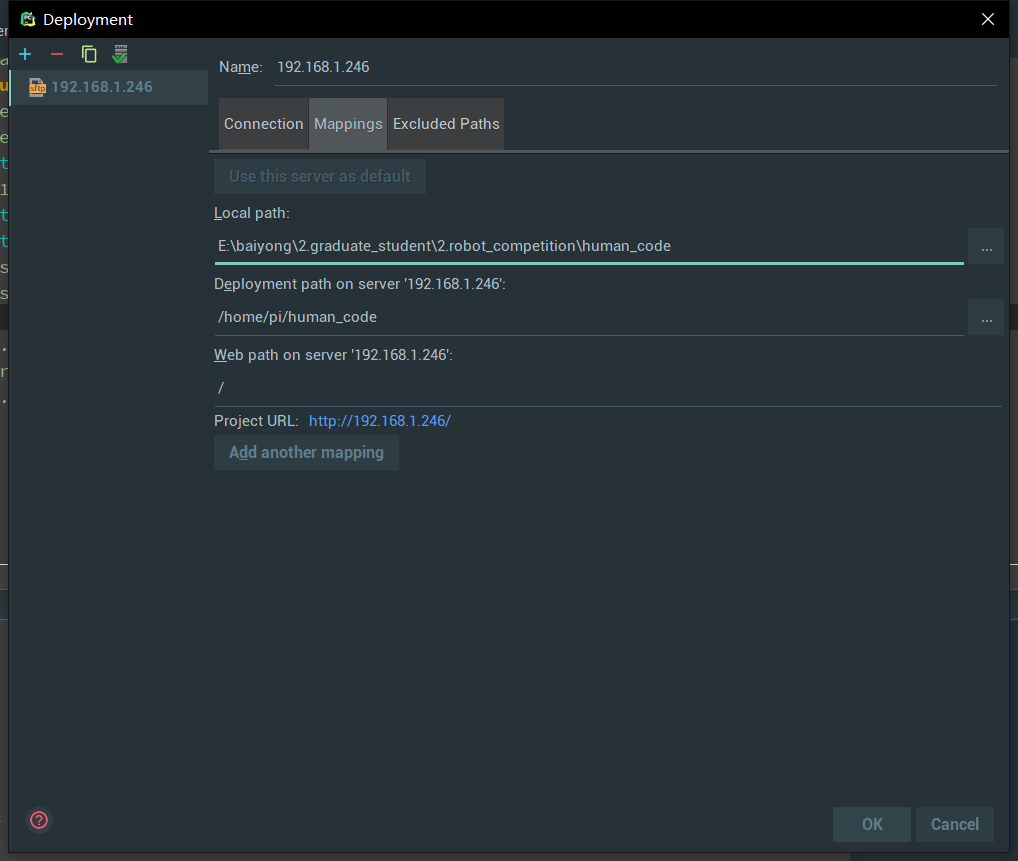
上传文件快捷键:ctrl+shift+alt+x;
5.keil 调试中Watch变量删除http://www.stmcu.org.cn/module/forum/forum.php?mod=viewthread&tid=616256&page=1
二、程序代码
1.MPU6050
mpu6050读取代码:https://www.52pojie.cn/thread-998097-1-1.html
bus = smbus.SMBus(0) # or bus = smbus.SMBus(1) for Revision 2 boards
修改IIC通信速率:https://blog.csdn.net/xukai871105/article/details/18234075
2.串口通信
https://blog.csdn.net/qq_40388909/article/details/79438317

 浙公网安备 33010602011771号
浙公网安备 33010602011771号