Vrep与ROS结合使用
前言与参考
又开新坑了,这次是做TA 自己也不会 现学现卖,学完还得教人emmm 慌的一批
测试平台:ROS + Ubuntu 18.04
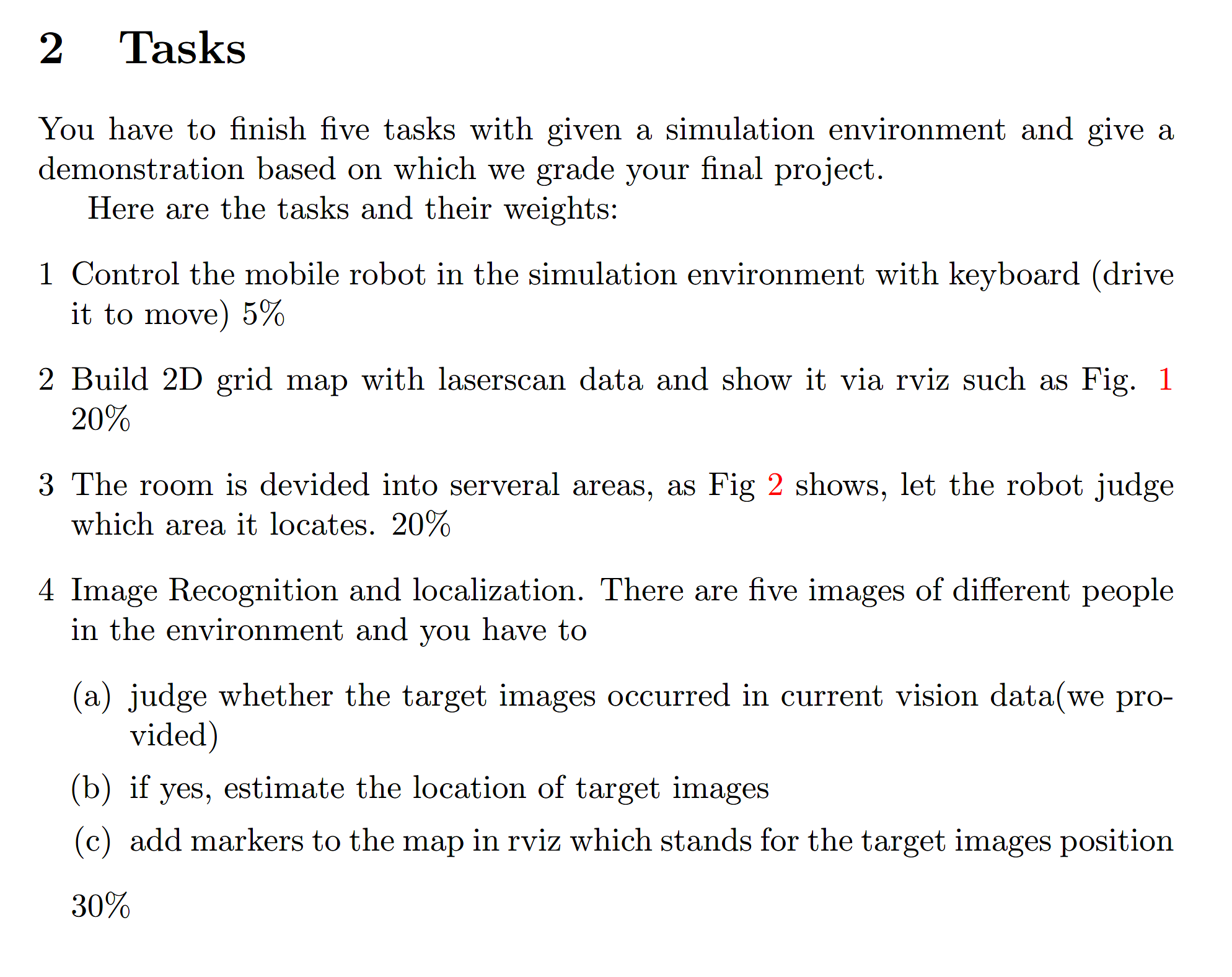
主要目标:直接截图Project里面的东西了,总的来说就是放一个机器人 然后使用键盘控制,建栅格地图,图像识别和定位。但是呢,因为这是Project的目标,所以我大概引个头总不能给做完是把 emmmm 引个头 使用而已
参考链接:
- CoppeliaSim 下载地址:https://coppeliarobotics.com/downloads
- 官方的手册:https://www.coppeliarobotics.com/helpFiles/index.html
- 一个非常基础的Youtub教学视频:https://www.youtube.com/watch?v=nLKLu4Hw_mU
- HKUST ELEC 3210的Project
下载与安装
通过https://coppeliarobotics.com/downloads这里下载对应的版本,我这里下载的是ubuntu-18.04
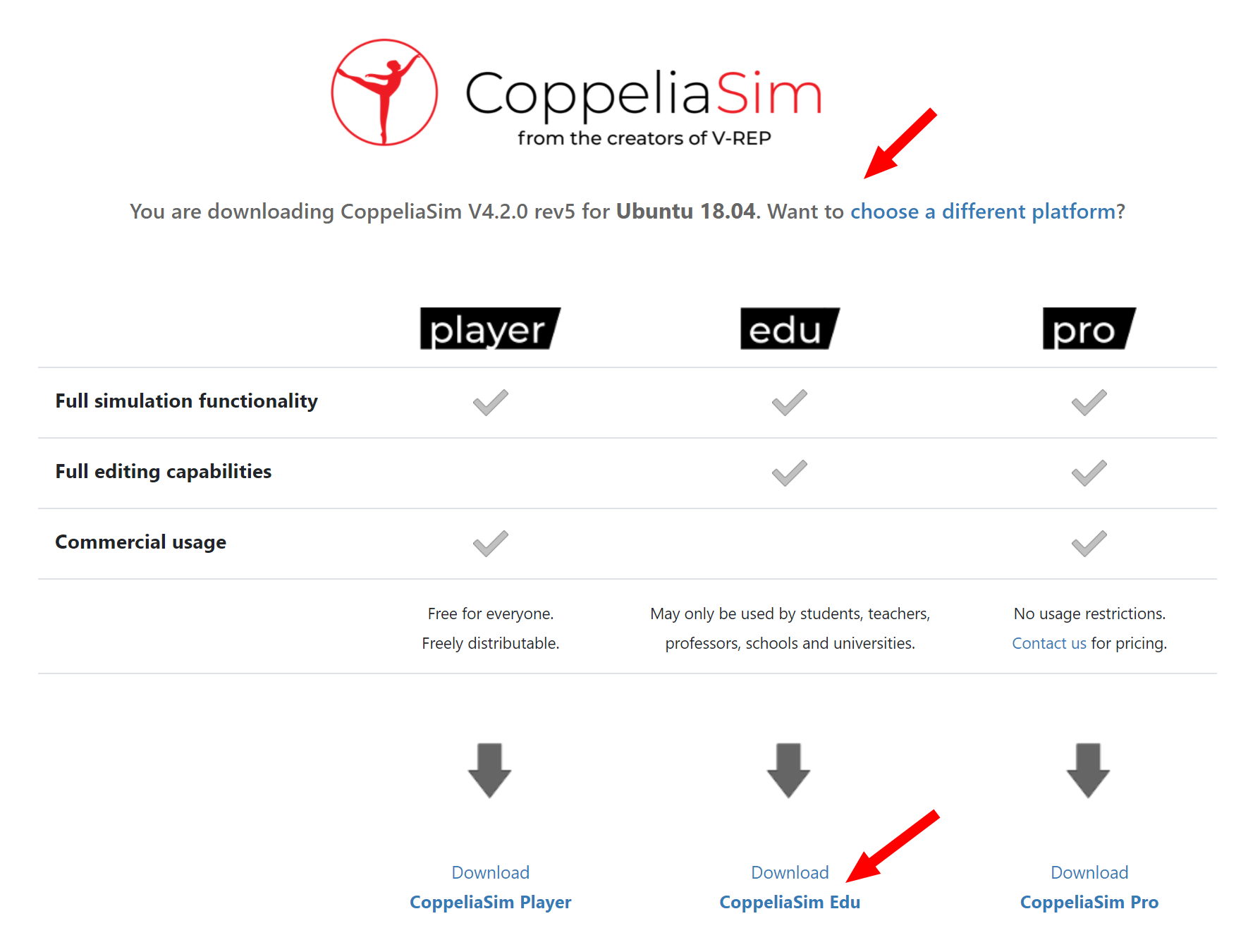
如图,然后解压,我重命名了文件夹VREP。然后在.zshrc或者.bashrc添加一下PATH
export VREP_ROOT=(your path to VREP folder)
注意这里是你自己那边的路径哈
然后就可以运行了
cd ~/VREP
./coppeliaSim.sh
与ROS结合
首先在自己的catkin_ws/src文件夹内clone一下
cd ~/catkin_ws/src
git clone https://gitee.com/kin_zhang/simExtROS.git
git clone https://gitee.com/kin_zhang/ros_bubble_rob.git
catkin_make
如果catkin_ws啥都没有就catkin_make 否则单独编译一下这两个就行,比如:(默认大家都source了哈)
catkin_make -DCATKIN_WHITELIST_PACKAGES=ros_bubble_rob
运行ROSCORE
roscore
根据官方文档来看首先需要运行ROSCORE不然就会出现
[simExtROS:error] ROS master is not running
[CoppeliaSim:error] plugin 'ROS': load failed (failed initialization).
接着运行VREP本身,就会出现加载成功:
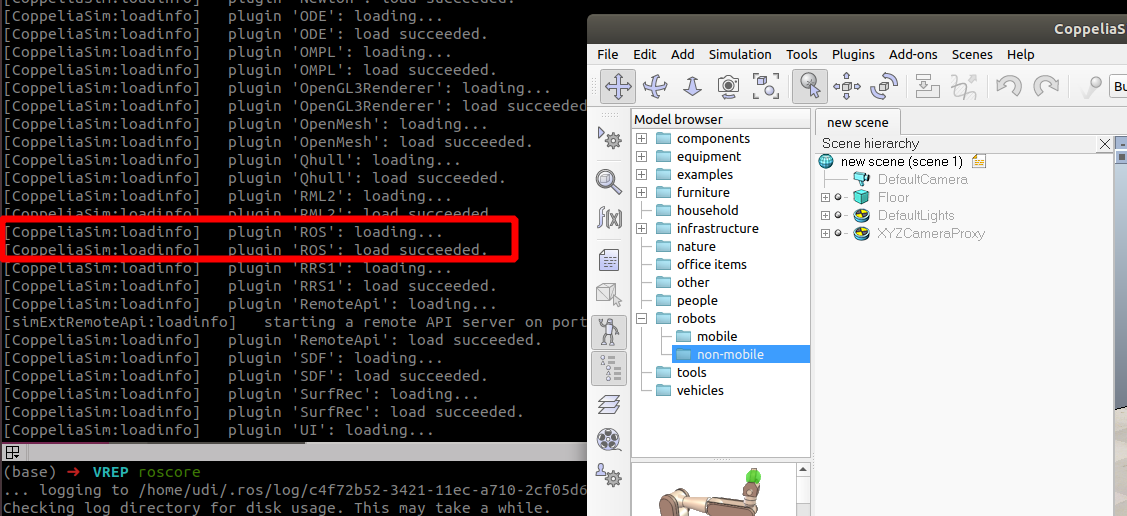
至此ROS连接成功,开始放车和设置传感器topic pub了
自建小底盘
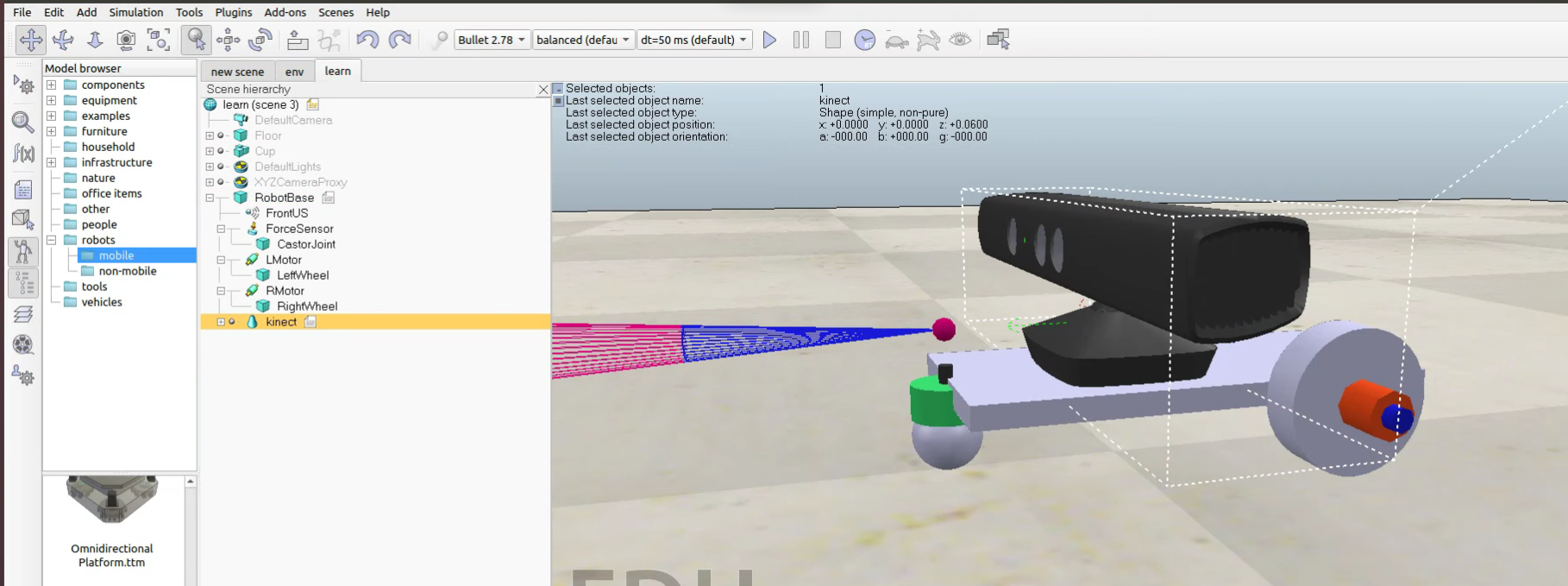
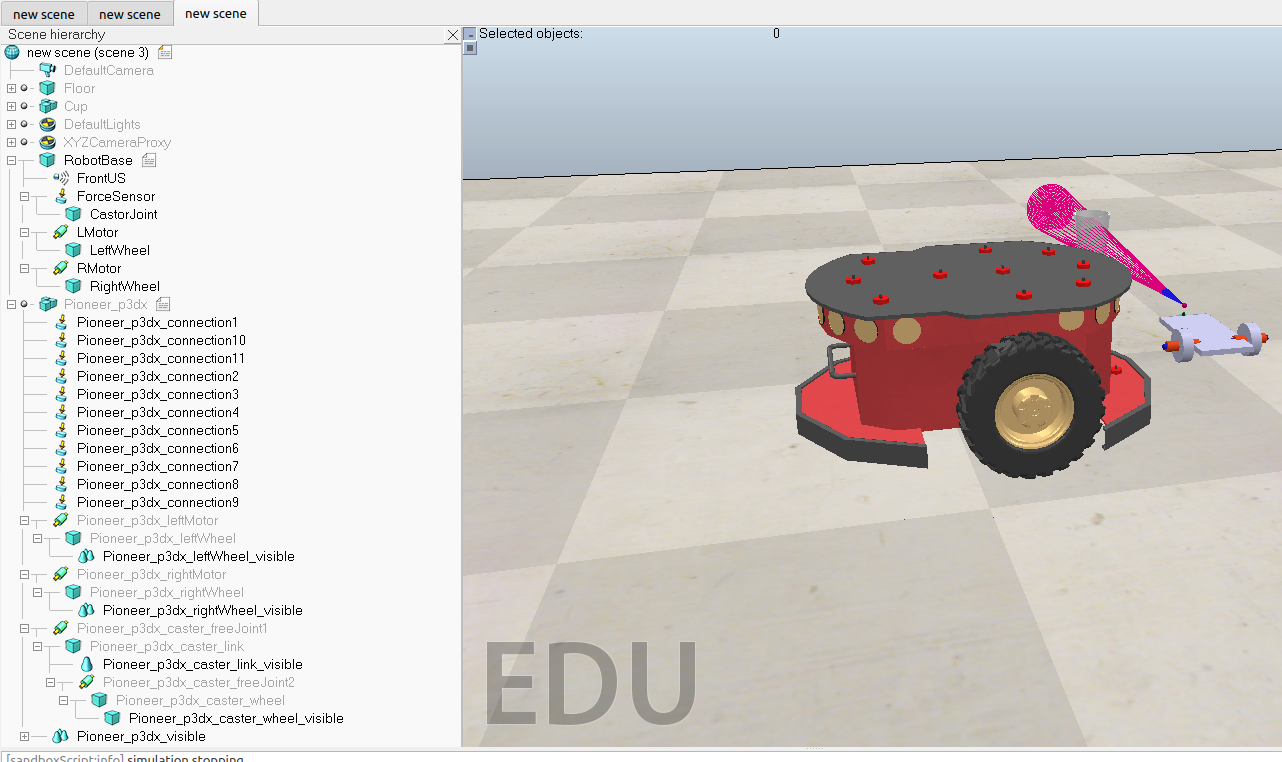
但其实是可以拿model browser - robots - mobile 里面有小的小车啥的... 但是为了基础就随意搞个长方体+两个轮子 放个超声波 放个kinect,其实和参考资料里面的youtube是一模一样的... 文字版,但是感觉这种搭建视频更方便点。最后呈现的样子是:文件链接附到最后结尾处了(这个是名为learn.ttt)
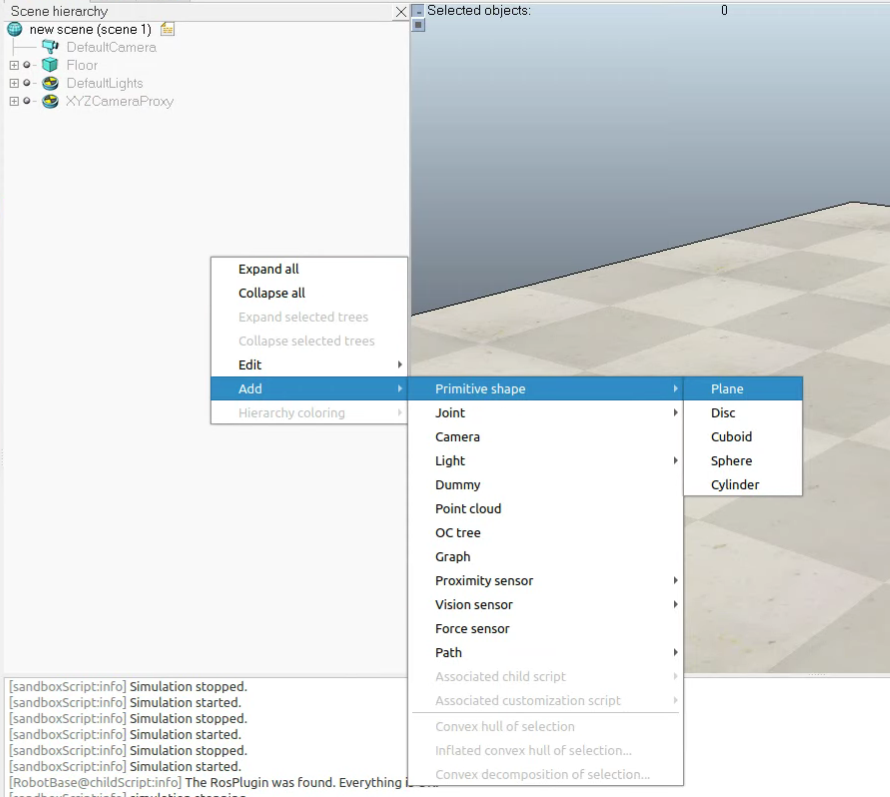
首先熟悉一下怎么放东西,点到scene hierachy 然后空白处右键即可添加一系列的东西,右键 -> Add -> Primitive shape -> xxx
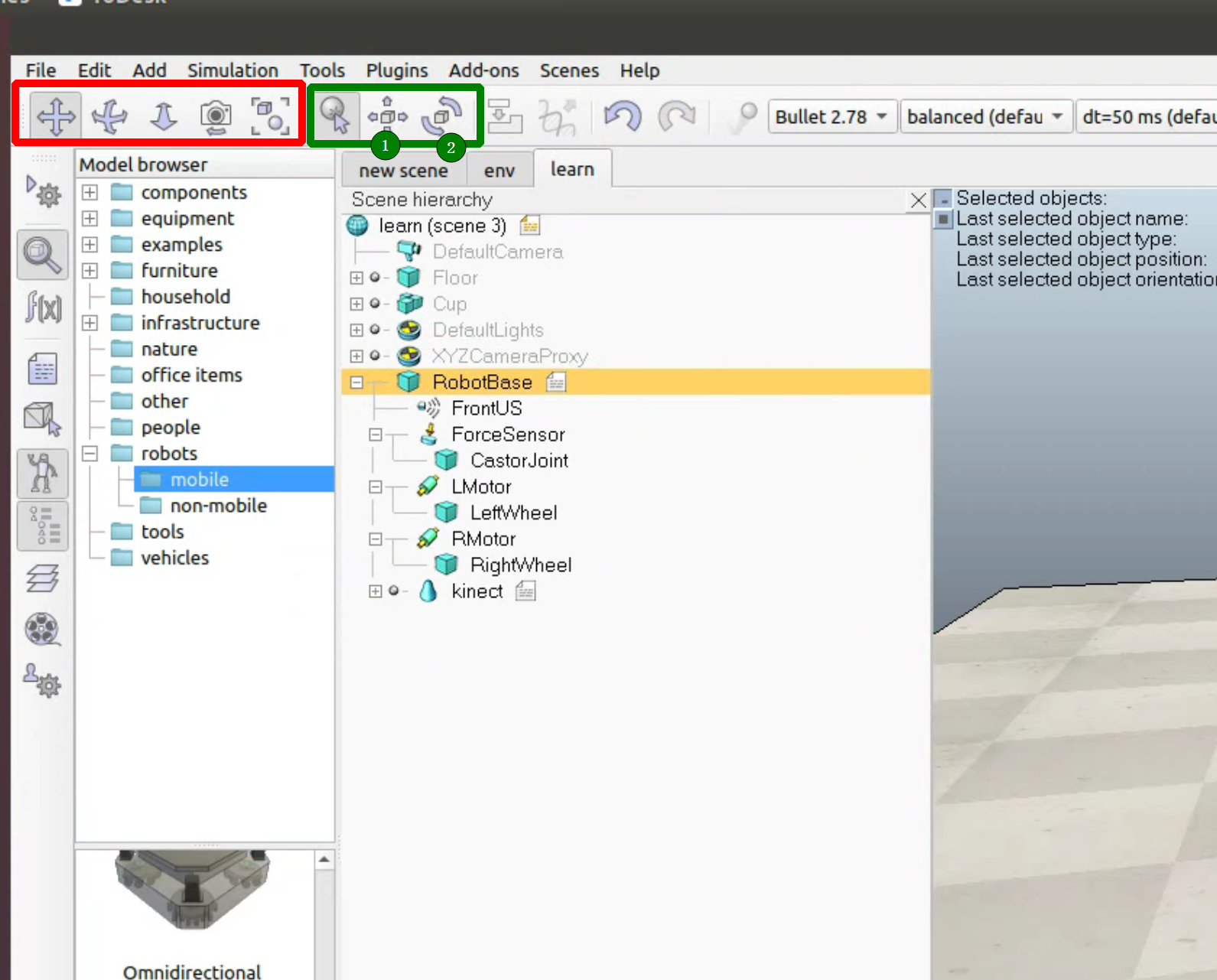
熟悉一下界面,红色为可视化的角度调整,绿色部分为对物体的调整,比如选中,①平移/位置设定,②旋转
以下为步骤:
-
添加Cuboid,尺寸为:
[x,y,z] = [0.1,0.2,0.01],双击一下名字处就能重命名为:RobotBase,然后双击一下蓝色块就能打开特性,点击common然后把object special properties都勾一下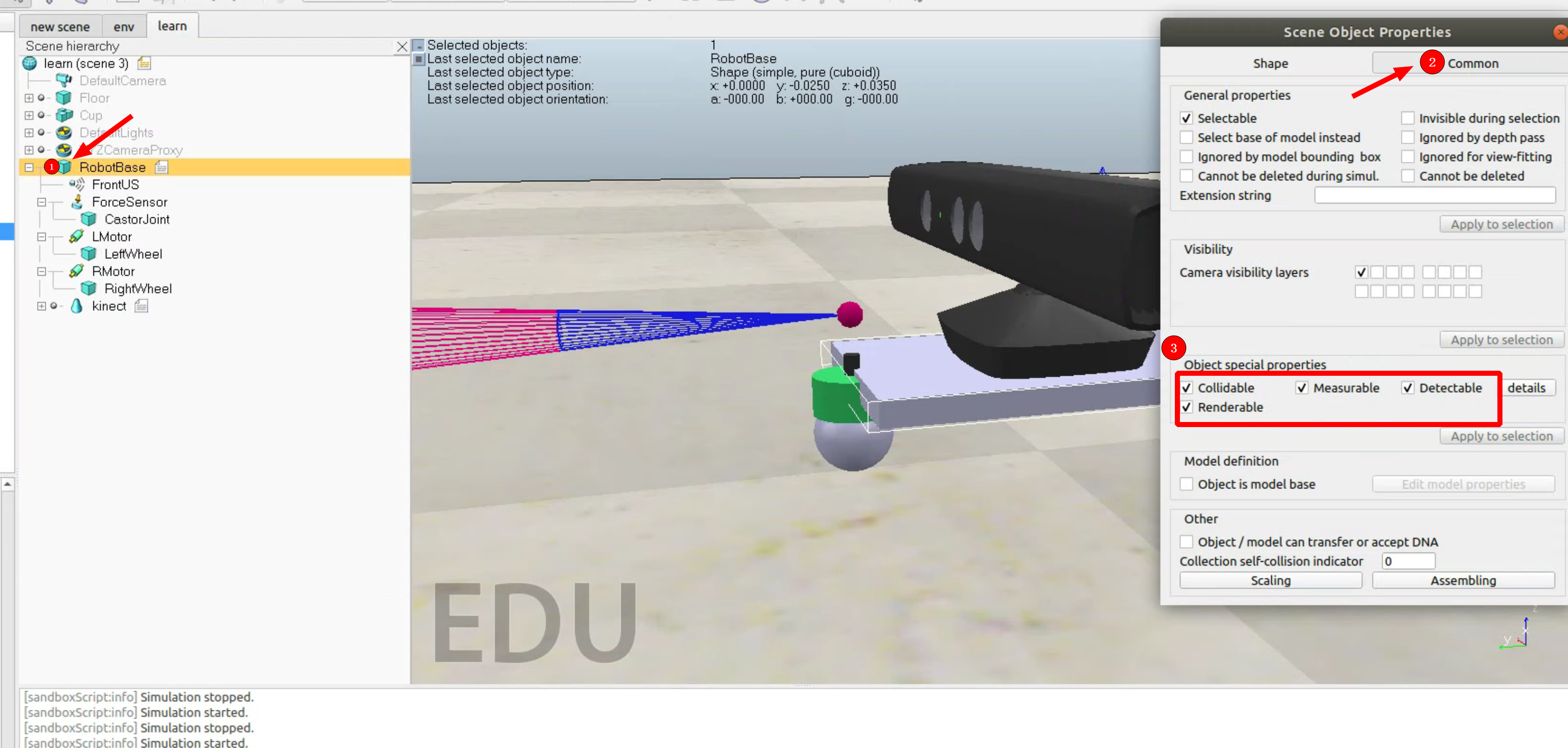
然后点击一下①平移,可以设定这个长方体的位置
[x,y,z]=[0,0,0.035] -
添加cylinder,尺寸为:
[x,z]=[0.06,0.02],同上重命名RightWheel,勾选特性,①位置设定:
[x,y,z]=[0.065,-0.05,0.035],②旋转:beta=90 -
左轮LeftWheel 可以选中上面右轮,复制粘贴,然后改一下x位置就行
①位置设定:
[x,y,z]=[-0.065,-0.05,0.035] -
添加一个万向轮,就添加球就行:右键 -> Add -> Primitive shape -> sphere,尺寸:
[x]=0.03,同上重命名CastorJoint,如第一步一样勾选特性①位置设定:
[x,y,z]=[0,0.075,-0.15] -
然后这之后就开始添加关节Joint了,右键 -> Add -> Joint -> Revolute,重命名为LMotor,双击属性改可视长度为0.06,直径0.02,然后如图勾选电机属性
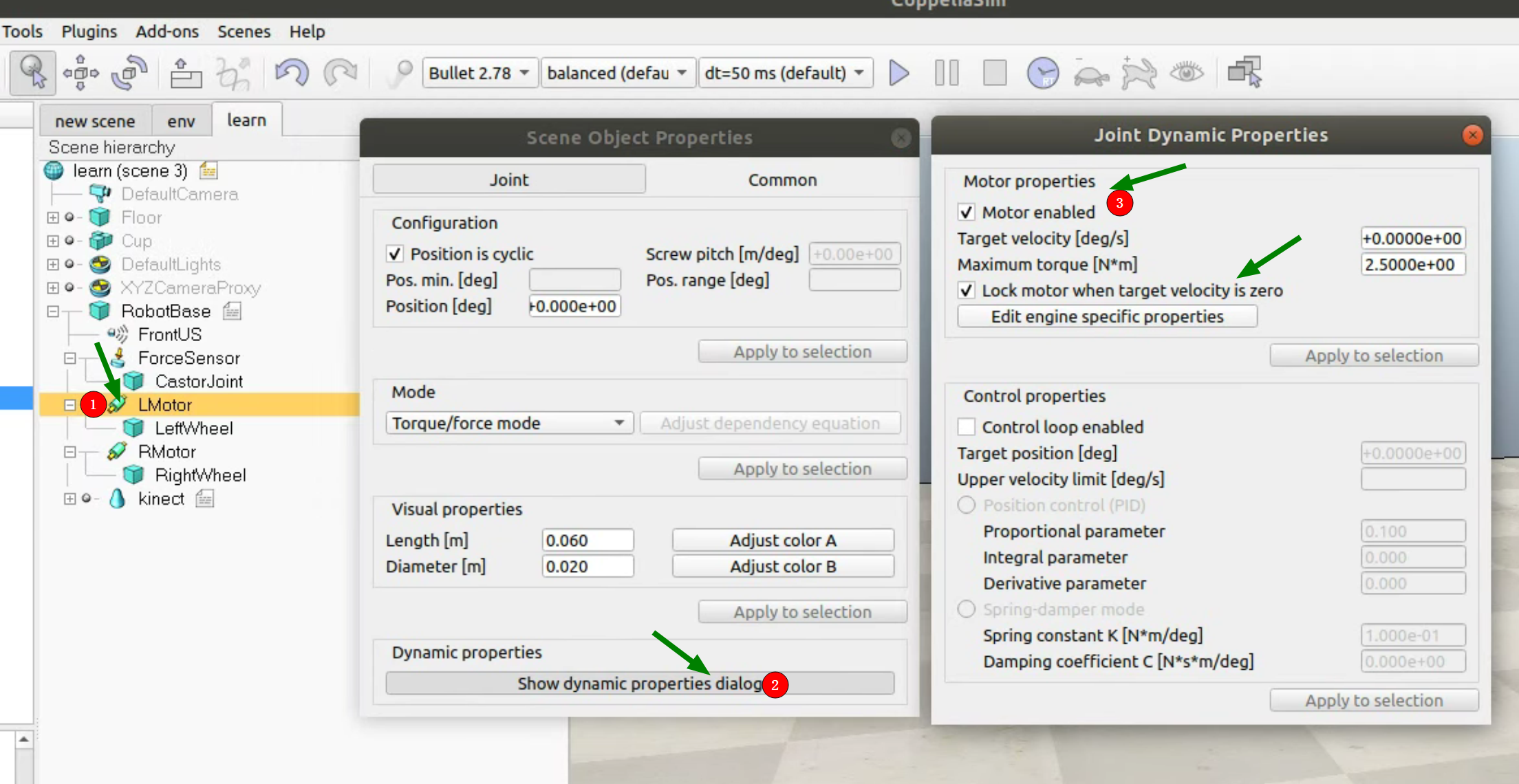
先点Motor,然后CTRL键选中Wheel,然后再点平移/位置改变,直接点击apply to section 就可以使得电机位置直接到轮子那里了,②旋转:
beta=-90 -
复制一下RMotor然后同上选中对应的轮子,直接点击apply to section,②旋转:
beta=90 -
添加前万向轮的force sensor,给力点。双击属性改
object size=0.03①位置设定:
[x,y,z]=[0,0.075,0.03] -
最后就是按住鼠标把各自的东西放在子分支下,如此gif展示:
-
添加传感器,右键 -> Add -> Joint -> Proximity sensor -> Ray type,重命名为FrontUS,并放到RobotBase Tree下,如8步骤
双击传感器进行属性设置如下:
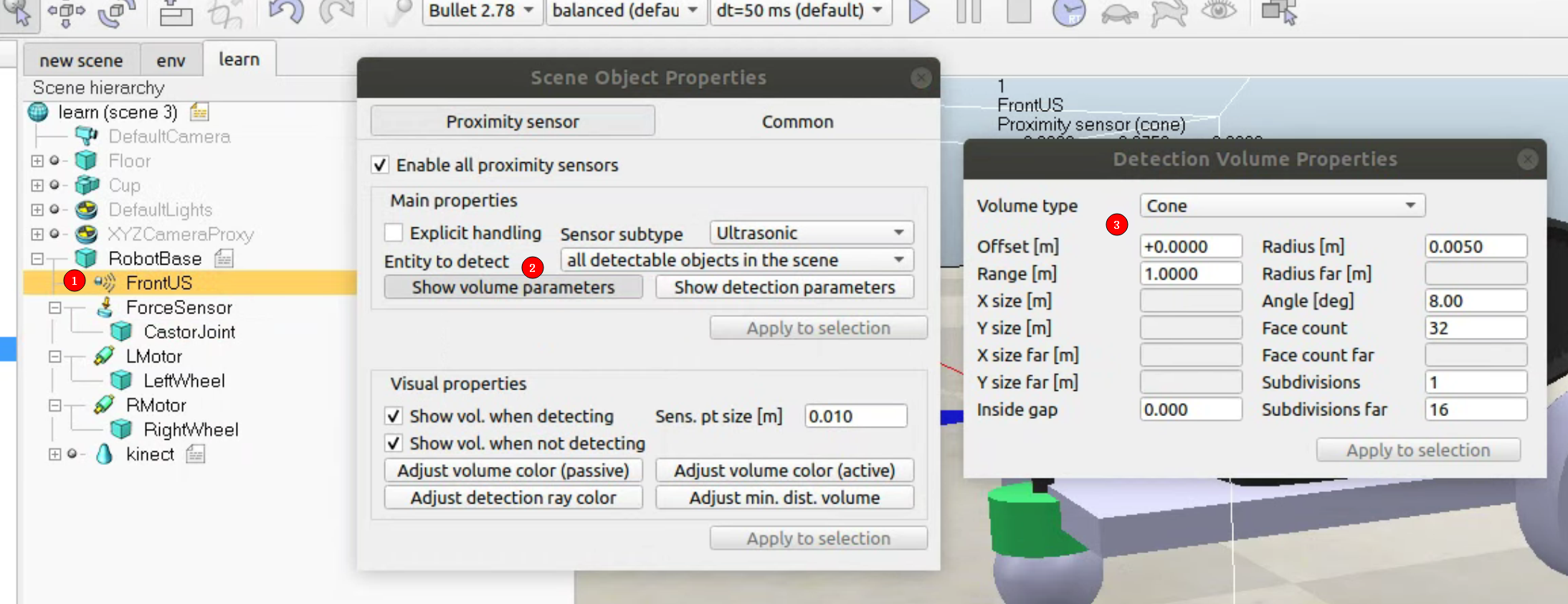
①位置设定:
[x,y,z]=[0,0.75,0.06],②旋转:alpha=90 -
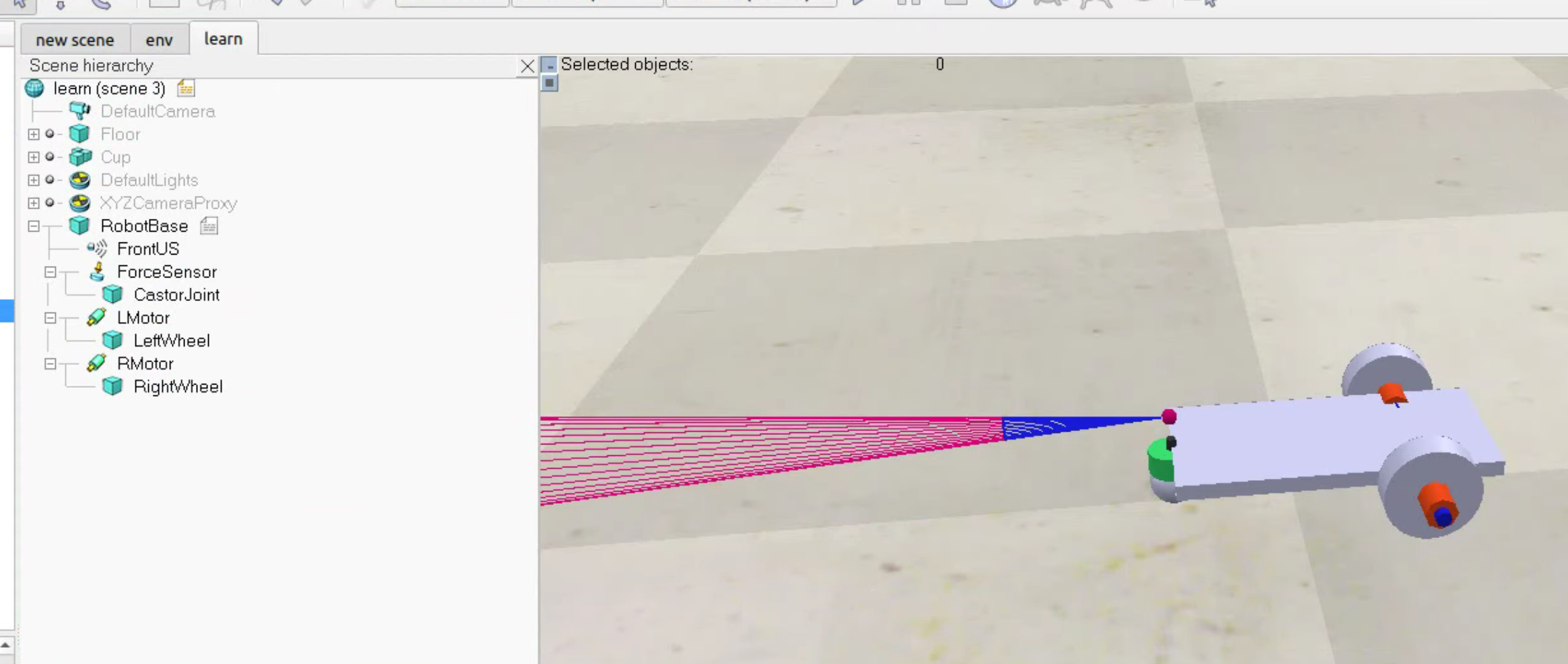
真的是最后拉,这样的设置 界面应该出现这个东西了,然后选中RobotBase -> 右键 -> Associated customization script -> Non threaded,在RobotBase旁边就有个文本小标,双击就是代码区了
代码区
直接复制下面,虽然是lua语言,其实认真看... 也能看得懂在干啥,就是不同的传感器发布的可能需要变一下,比如这里是按超声波的直接发的数值,并没有做tf变换,也没有指定是什么frame_id等等等
function callback_MotorsVelocity(msg)
--TODO: change the function to get robot velocity and use the inverse kinematic equations
-- discussed in the class to calculate wheel velocities
Vl = msg.linear.x + msg.angular.z
Vr = msg.linear.y - msg.angular.z
sim.setJointTargetVelocity(hLeftMotor,Vl)
sim.setJointTargetVelocity(hRightMotor,Vr)
sim.addStatusbarMessage(string.format("Vl:%f Vr:%f",Vl, Vr))
end
if (sim_call_type==sim.syscb_init) then
-- Get handle to simulation entities
hLeftMotor = sim.getObjectHandle("LMotor")
hRightMotor = sim.getObjectHandle("RMotor")
hFrontUS = sim.getObjectHandle("FrontUS")
-- TODO: Create the handles of your two new ultrasonic sensors
-- Check if the required ROS plugin is loaded (libv_repExtRos.so or libv_repExtRos.dylib):
local moduleName=0
local moduleVersion=0
local index=0
local pluginNotFound=true
while moduleName do
moduleName,moduleVersion=sim.getModuleName(index)
if (moduleName=='ROS') then
pluginNotFound=false
end
index=index+1
end
rosInterfacePresent=simROS
if (pluginNotFound) then
-- Display an error message if the plugin was not found:
sim.addStatusbarMessage("The RosPlugin was not found. Simulation will not run properly!")
else
-- Now enable topic publishing and streaming of the vision sensor's data
sim.addStatusbarMessage("The RosPlugin was found. Everything is OK!")
sensorPub=simROS.advertise('/frontUS','std_msgs/Float32') --TODO: change the message type name as described in the assignment
motorsSub=simROS.subscribe('/cmd_vel','geometry_msgs/Twist','callback_MotorsVelocity')
-- simROS.publisherTreatUInt8ArrayAsString(pub) -- treat uint8 arrays as strings (much faster, tables/arrays are kind of slow in Lua)
end
end
if (sim_call_type==sim.syscb_actuation) then
-- Send an updated sensor and simulation time message, and send the transform of the robot:
if not pluginNotFound then
--TODO: write the code to get the distance from your new sensors and publish the message
result,distance=sim.readProximitySensor(hFrontUS)
if(distance~=nil) then
simROS.publish(sensorPub,{data=distance})
end
end
end
if (sim_call_type==sim.syscb_cleanup) then
if rosInterfacePresent then
simROS.shutdownPublisher(sensorPub)
simROS.shutdownSubscriber(motorsSub)
end
end
这个搞完后,点击界面上的开始,(记得先打开roscore),然后就可以看到topic里有数据了,控制车辆可以自己弄个键盘控车也可以直接pub出来,比如:
rostopic pub /cmd_vel geometry_msgs/Twist "linear:
x: 1.1
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.01" -r 1
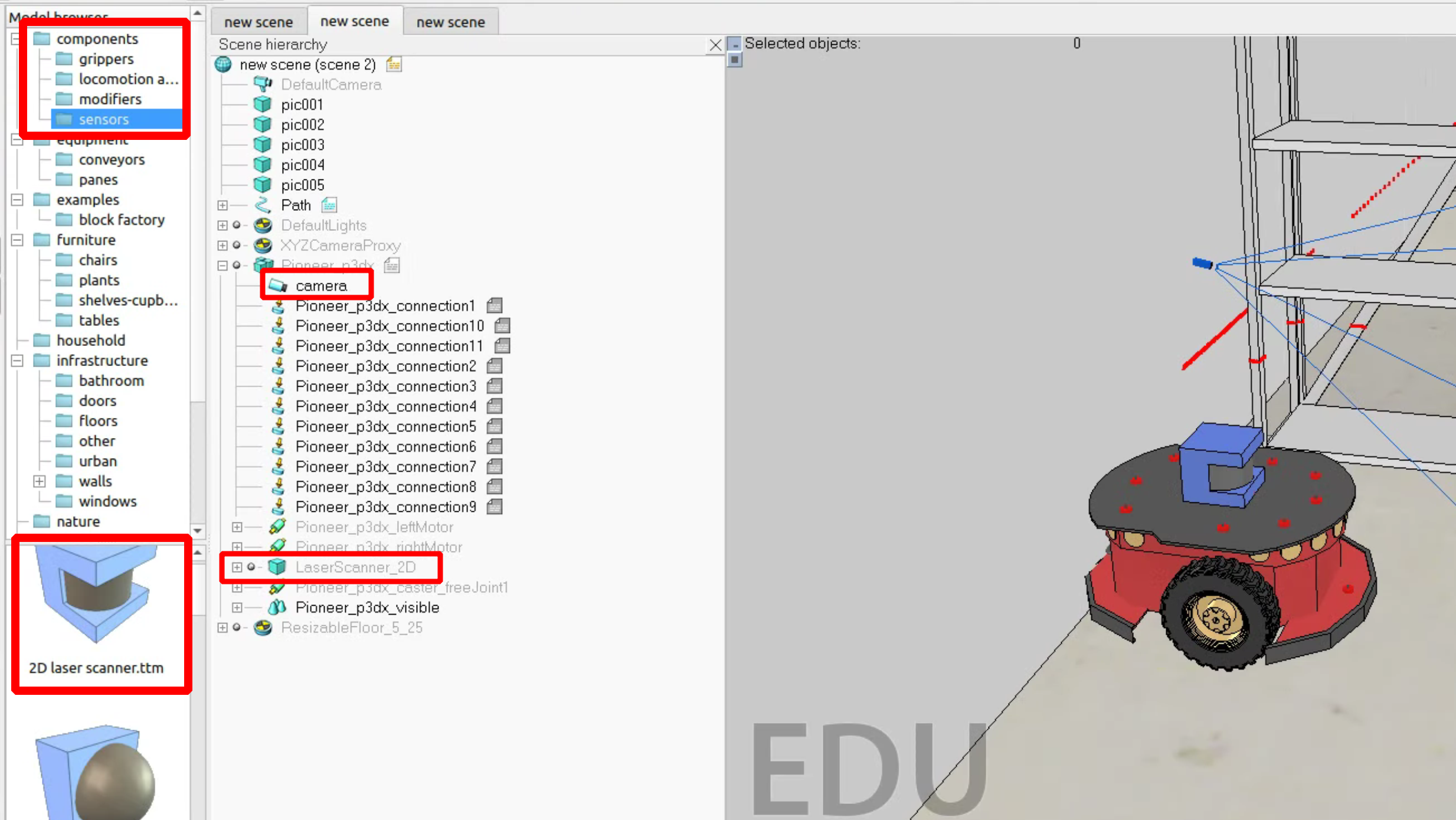
更为复杂的场景
上述是自建的小底盘,其实Vrep里有很多模型可以直接拖进来使用,以robots -> mobile -> Pioneer为例,拖进来后可以查看这里面有的东西,我们再添加一个camera,一个2D的laser scan
然后代码区则是:
-- set velocity
function velocity_callback(msg)
-- This is the sub_velocity callback function
-- sim.addStatusbarMessage('sub_velocity receiver: ' .. msg.linear.x)
sim.auxiliaryConsolePrint(console_debug,'linear: ' .. msg.linear.x)
sim.auxiliaryConsolePrint(console_debug,' angular: ' .. msg.angular.z .. '\n')
vLeft = 6*msg.linear.x - 0.6*msg.angular.z
vRight = 6*msg.linear.x + 0.6*msg.angular.z
sim.setJointTargetVelocity(motorLeft,vLeft)
sim.setJointTargetVelocity(motorRight,vRight)
end
-- disable or enable laser
function laserSwitch_callback(msg)
if msg.data then
sim.auxiliaryConsolePrint(console_debug,"laser switch cmd: publish laserscan")
else
sim.auxiliaryConsolePrint(console_debug,"laser switch cmd: stop publishing laserscan")
end
IS_LASER_ENABLE = msg.data
end
-- disable or enable camera
function cameraSwitch_callback(msg)
if msg.data then
sim.auxiliaryConsolePrint(console_debug,"camera switch cmd: publish image")
else
sim.auxiliaryConsolePrint(console_debug,"camera switch cmd: stop publishing image")
end
IS_CAMERA_ENABLE = msg.data
end
if (sim_call_type==sim.syscb_init) then
-- create the console to print some debug infomation
console_debug=sim.auxiliaryConsoleOpen('debug info',100000,1)
-- Check the required RosInterface first
moduleName=0
index=0
rosInterfacePresent=false
while moduleName do
moduleName=sim.getModuleName(index)
if (moduleName=='ROS') then
rosInterfacePresent=true
end
index=index+1
end
if rosInterfacePresent then
sub_velocity = simROS.subscribe('/vrep/cmd_vel','geometry_msgs/Twist','velocity_callback')
sub_laser = simROS.subscribe('/vrep/laser_switch','std_msgs/Bool','laserSwitch_callback')
sub_camera = simROS.subscribe('/vrep/camera_switch','std_msgs/Bool','cameraSwitch_callback')
pub_camera = simROS.advertise('/vrep/image','sensor_msgs/Image')
pub_laser = simROS.advertise('/vrep/scan','sensor_msgs/LaserScan')
pub_timer = simROS.advertise('/simTime','std_msgs/Float32')
else
sim.auxiliaryConsolePrint(console_debug,'rosinterface has not been loaded -- pause...')
sim.pauseSimulation()
end
-- pioneer car
car = sim.getObjectHandle("Pioneer_p3dx")
motorLeft=sim.getObjectHandle("Pioneer_p3dx_leftMotor")
motorRight=sim.getObjectHandle("Pioneer_p3dx_rightMotor")
-- camera
IS_CAMERA_ENABLE = true
cameraHandle=sim.getObjectHandle('camera')
image_seq=0
-- laser
IS_LASER_ENABLE = true
laser_cnt = 0
laserscanHandle = sim.getObjectHandle("LaserScanner_2D")
laserHandle=sim.getObjectHandle("LaserScannerLaser_2D")
jointHandle=sim.getObjectHandle("LaserScannerJoint_2D")
graphHandle=sim.getObjectHandle("LaserScannerGraph_2D")
objName=sim.getObjectName(laserscanHandle)
communicationTube=sim.tubeOpen(0,objName..'_2D_SCANNER_DATA',1)
scanningAngle= 180
scanningDensity= 5
laser_seq = 0
-- get transform
local tl = sim.getObjectPosition(laserscanHandle,sim.handle_parent)
local tc = sim.getObjectPosition(cameraHandle,sim.handle_parent)
local q = sim.getObjectQuaternion(cameraHandle,sim.handle_parent)
laser2robot= {
header={
seq=0,
stamp=0.0,
frame_id="base_link"
},
child_frame_id="laser_link",
transform={
translation = {x=tl[1],y=tl[2],z=tl[3]},
rotation= {x=0,y=0, z=0,w=1}
}
}
camera2robot= {
header={
seq=0,
stamp=0.0,
frame_id="base_link"
},
child_frame_id="camera_link",
transform={
translation = {x=tc[1],y=tc[2],z=tc[3]},
rotation= {x=q[1],y=q[2], z=q[3],w=q[4]}
}
}
tf_seq = 0;
end
if (sim_call_type==sim.syscb_sensing) then
--
-- get image from vision sensor
--
local current_sim_time = sim.getSimulationTime()
simROS.publish(pub_timer, {data=current_sim_time})
if IS_CAMERA_ENABLE then
local img={}
local data,w,h=sim.getVisionSensorCharImage(cameraHandle)
img['header']={seq=image_seq,stamp=current_sim_time, frame_id="camera_link"}
img['height']=h
img['width']=w
img['encoding']='rgb8'
img['is_bigendian']=1
img['step']=w*3
img['data']= sim.unpackUInt8Table(data)
simROS.publish(pub_camera,img)
image_seq = image_seq +1;
end
--
-- get laserscan
--
if IS_LASER_ENABLE and laser_cnt >= 4 then
laser_cnt = 0
sim.resetGraph(graphHandle)
pts=scanningAngle*scanningDensity+1
p=-scanningAngle*math.pi/360
stepSize=math.pi/(scanningDensity*180)
ranges={}
modelInverseMatrix=simGetInvertedMatrix(sim.getObjectMatrix(laserscanHandle,-1))
-- generate data
for i=0,pts,1 do
sim.setJointPosition(jointHandle,p)
p=p+stepSize
r,dist,pt=sim.handleProximitySensor(laserHandle) -- pt is RELATIVE to te rotating laser beam!
if r>0 then
table.insert(ranges, dist)
end
sim.handleGraph(graphHandle,0.0)
end
-- Now send the data:
if #ranges>0 then
local scan={}
scan['header']={seq=laser_seq, stamp=current_sim_time, frame_id="laser_link"}
scan['angle_min']=0
scan['angle_max']=scanningAngle*math.pi/180
scan['angle_increment']=-1*stepSize
scan['time_increment']=0
scan['scan_time']= 0
scan['range_min'] = 0
scan['range_max'] = 50
scan['ranges']= ranges
scan['intensities']= {}
simROS.publish(pub_laser,scan)
laser_seq = laser_seq + 1
end
end
laser_cnt = laser_cnt + 1
--
-- transform
--
laser2robot['header']['stamp']=current_sim_time
laser2robot['header']['seq'] = tf_seq
simROS.sendTransform(laser2robot)
camera2robot['header']['stamp']=current_sim_time
camera2robot['header']['seq'] = tf_seq
simROS.sendTransform(camera2robot)
tf_seq = tf_seq + 1;
end
if (sim_call_type==sim.syscb_cleanup) then
-- Following not really needed in a simulation script (i.e. automatically shut down at simulation end):
if rosInterfacePresent then
simROS.shutdownSubscriber(sub_laser)
simROS.shutdownSubscriber(sub_camera)
simROS.shutdownSubscriber(sub_velocity)
simROS.shutdownPublisher(pub_camera)
simROS.shutdownPublisher(pub_laser)
end
end
if (sim_call_type==sim.syscb_actuation) then
end
上述相关文件如有vrep可以自行下载打开查看:链接:https://pan.baidu.com/s/1KzBhkvSQjtFiAlDdm_-6Ww 提取码:95ne

 浙公网安备 33010602011771号
浙公网安备 33010602011771号