Paper reading (1) 2013,Brambilla, Swarm robotics a review from the swarm engineering perspective,Swarm Intelligence
2013,Brambilla, Swarm robotics a review from the swarm engineering perspective,Swarm Intelligence
Abstract
本文主要关注的是Swarm Robots在工程上的思想和内容。
Introduction
Swarm Robots的定义为:a novel approach to the coordination of large numbers of robots;大量机器人协作方法的研究;
协作机器人的主要特点有:
- robots are autonomous;
- robots are situated in the environment and can act to modify it;
- robots's sensing and communication capabilities are local;
- robots do not have access to centralized control and/or to global knowledge;
- robots cooperate to tackle a given task
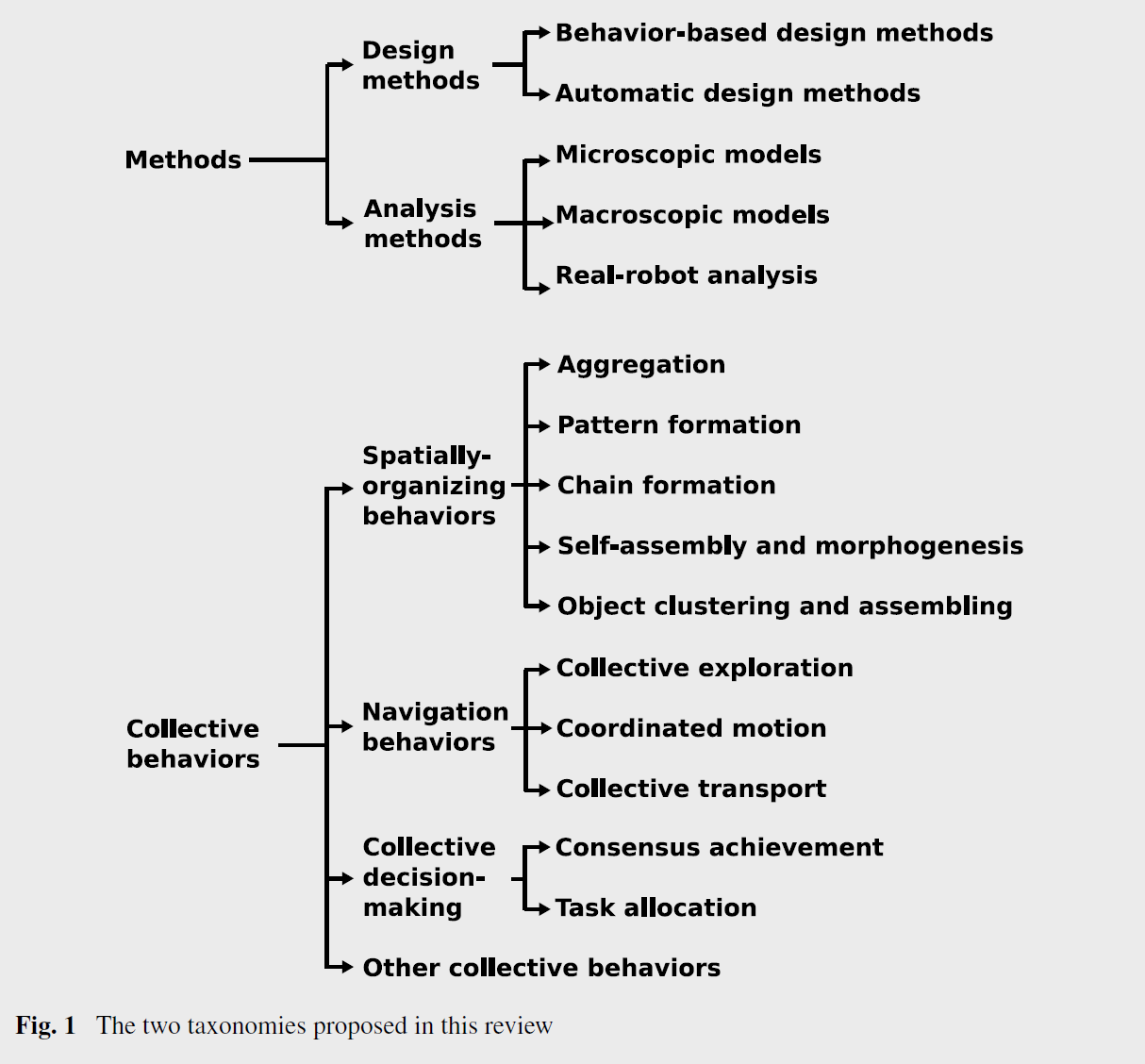
本论文中主要介绍了Swarm Robots的研究现状。 将目前的研究现状分成Fig.1所示分类,分别介绍了。
第一类:实现Swarm Robots的时候所用到的设计、分析方法分类,分别分析了目前的方法。
第二类:根据Swarm Robots要实现的任务分类,总结了目前的文章。
By taking inspiration from social animals, swarm robotics aims at developing robotics
systems that exhibit swarm intelligence features similar to those that characterize social
animals. In particular, swarm robotics systems are meant to be robust, scalable, and flexible.
Swarm Robots目的是像自然界的动物协作一样,通过机器人之间的协作,鲁邦,可扩展,灵活地完成一个具体任务。
Methods
Design
目前没有统一是设计方法,还是人类设计特定的群体机器人方法还是主要方法。
基于设计的方法可以再分为:
- behavior-based design (基于行为的)
- Automatic design (自动设计)
Behavior-based design may ease the design process as, sometimes, the details of a particular behavior are already understood and mathematical models are available.
如果知道那些行为的数学模型的话,可以基于行为设计并实现模型。
Automatic design methods can be categorised into two category: evolutionary robotics(进化机器人) and multi-robot reinforcement learning.
Behavior-based design
Probabilistic finite state machine design(概率有限状态机)
Virtual physics-based design
Other behavior-based design
Automatic design
Panait and Luke (2005) conducted an extensive review of the state of the art of automatic design methods for multiagent
and multi-robot systems. Differently from Panait and Luke (2005), in this review we focus on understanding the obtained results and the challenges of applying automatic design methods in swarm robotics.
Panait and Luke (2005)给出了当时的自动化设计方法的现状。该论文重点是目前方法获得的成就以及它们遇到的难点。
首先提出了(Sutton&Barto)RL的概念,其次,陈述了把RL应用到群体机器人时遇到的难点,之后,介绍进化机器人的历史脉络,最后,还给出了几个既没用RL,又没用evolutionary robot的一些方法。
Reinforcement Learning
Evolutionary Robots
Analysis
分析的目的是看看实际实现的是不是预想的。
分析的时候可以从两个角度分析,微观分析、宏观分析;
微观分析时用到一些模拟器,Kramer and Scheutz (2007)给出了survey of simulator
宏观分析里,介绍了很多基础知识
- Rate and differential Equation
- Classical Control and stability theory
- Other modeling approach
Collective Behaviors
将协作行为分成了以下几种
- spatially organizing behaviors
- navigation behaviors
- collective decision-making
- other collective behaviors
Spatial organizing behaviors(空间组织行为)
- Aggregation(聚合)
- Pattern Formation
- Chain Formation
- Self-assembly and morphogenesis
- Object clustering and assembling
3.2.3 Collective transport是和我的方向一致的研究问题;
Berman et al. (2011a)
Donald et al. (1997) 第一个collective transport的work
Campo et al. (2006) 拖拽物品
Gro and Dorigo (2009) 用人工智能的方法协作搬运
Baldassarre et al. (2006)
Ferrante et al. (2013)
Dorigo et al. 2012
navigation behaviors
3.3 Collective decision making是我研究的重点方向
- Consensus achievement
- Task allocation
collective decision making
总结
3.2.3, 3.3是和我研究非常类似的部分,继续深究
Application of Swarm Robots including: exploration, surveillance, search and rescue, humanitarian demining, intrusion tracking, cleaning, inspection and transportation of large objects
Swarm Robots在勘探、监视、搜救、人道主义排雷、入侵跟踪、大型物体的清洁、检查和运输等领域有着重要的作用。
可以将Swarm Robots问题抽象成两种问题
- Foraging: 觅食;像把猎物搬运到窝里一样(3.2.1, 3.2.3, 3.3)
- Construction: 构建;(3.1.5, 3.2.3, 3.3)
以后的研究方向,目前的问题可以总结为:
1、 Requirement modeling and specification: 实际问题的需求分析模型还在缺乏
2、 Design and realization: 实际问题的设计方法不统一
3、 Verification and validation:评价方法,评价指标,数据集,开源项目

 浙公网安备 33010602011771号
浙公网安备 33010602011771号