nRF24L01--2.4G无线通信模块(1)(51单片机和51单片机通信)
作者:李剀
出处:https://www.cnblogs.com/kevin-nancy/
或者
https://blog.csdn.net/Kevin_8_Lee/article/details/95667604欢迎转载,但也请保留上面这段声明。谢谢!(上面两个都是我的博客,只是在不同平台,大家可以点击链接看一下我的博客哦~~~)
写在前面:这一篇先介绍一下两个51单片机之间通过nRF24L01模块通信的过程,下一篇我会写 51单片机 和 STM32F407 单片机通信过程。
关于nRF24L01这个模块,网上可以说是资料非常多了,我参考的是云佳科技的pdf以及官方的datasheet英文数据手册。 另外,关于这个模块的介绍以及能够用来做什么也不过多的废话,数据手册及说明书都有。
51单片机我使用的是买来的开发板,核心是STC89C52,大家不必担心平台不同,都是使用软件模拟spi,引脚怎么定义都可以,也可以选择跟我使用的不一样的引脚,都Ok的。
一、硬件介绍
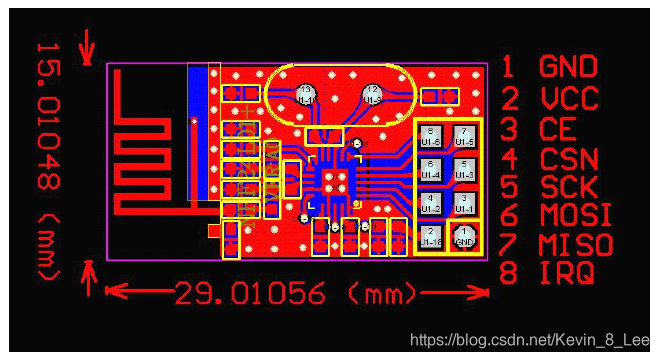
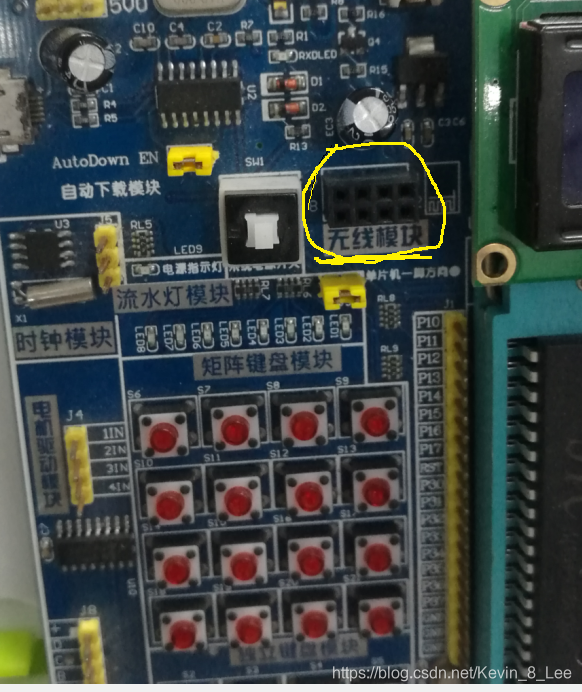
1、 nRF24L01模块接口电路见下图
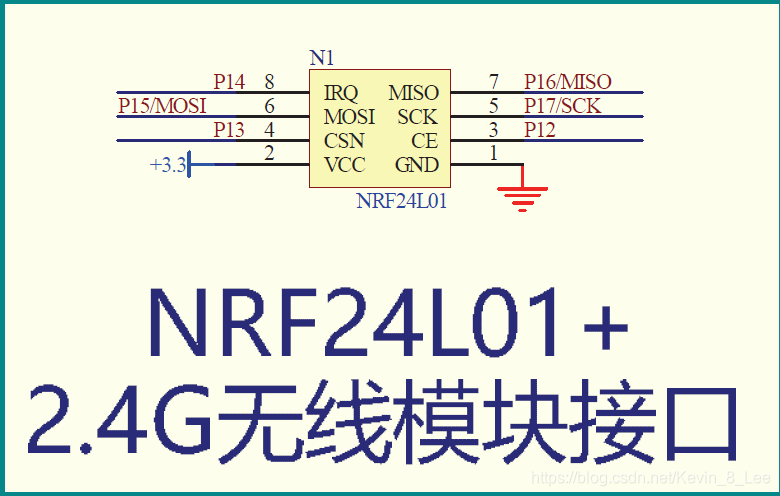
单片机是作为主机的,即Master nRF24L01作为从机,即Slave;
这样大家应该会很好理解MOSI和MISO了,,在我的另一篇博客也有SPI介绍,STM32F407使用MFRC522射频卡调试及程序移植成功,
这个我是在STM32上调试的,可以参考一下里面对spi MOSI和MISO的解释
1 GND ------>> 接地(与单片机共地)
2 VCC ------>> 1.9~3.6V (推荐3.3V)
3 CE ------>> RX 或 TX模式选择 高电平>10us则为发送模式 持续高电平为接收模式
设为低电平是待机模式4 CSN ------>> SPI片选信号 低电平使能,默认状态应该设置为高,以免发生错误的数据传输
5 SCK ------>> SPI时钟信号
6 MOSI ------>> 从SPI数据输入脚 (这里解释一下MOSI对应的单片机引脚输出信号, 即单片机输出数据给nRF24L01)
7 MISO ------>> 从SPI数据输出脚 (MISO对应单片机引脚设置为输入, 即数据从nRF24L01出来送进单片机 )
注:对于51单片机,无需设置单片机引脚的输入输出,但是STM32单片机需要设置
8 IRQ ------>> 可屏蔽中断脚 中断 低电平使能
** PS:**
1) VCC电压供电范围要求1.9~3.6V之间,由于51单片机大多是5V,所以自己的开发板上没有无线模块接口的要注意,把VCC另外接到这个范围的电压上,电压过高会烧坏模块。。 推荐 3.3V 其他引脚无电压要求
2) 用普通单片机IO口模拟SPI协议即可控制该模块,我一般都是用模拟SPI,可移植性高
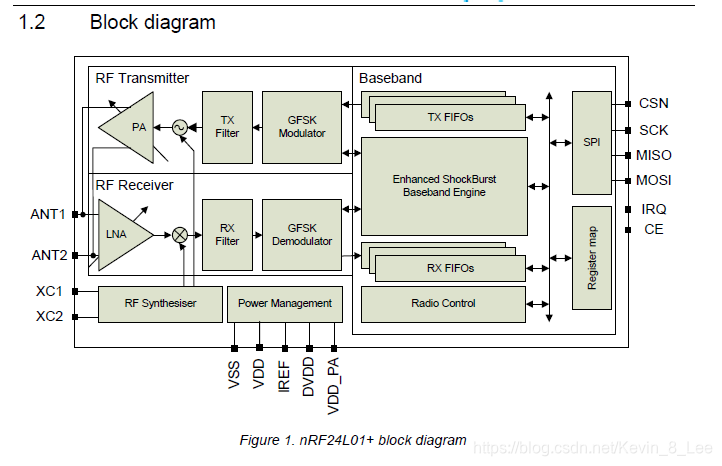
该模块使用的芯片方框图如下
2、 单片机2.4G模块引脚接口
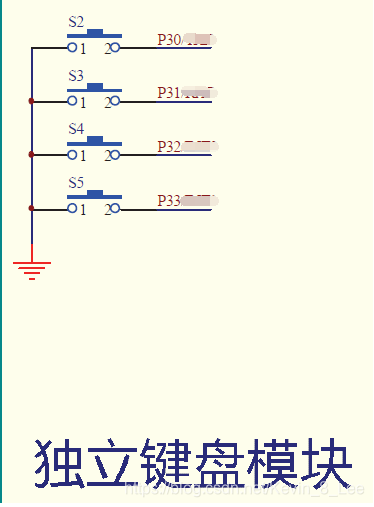
3、 单片机按键引脚图
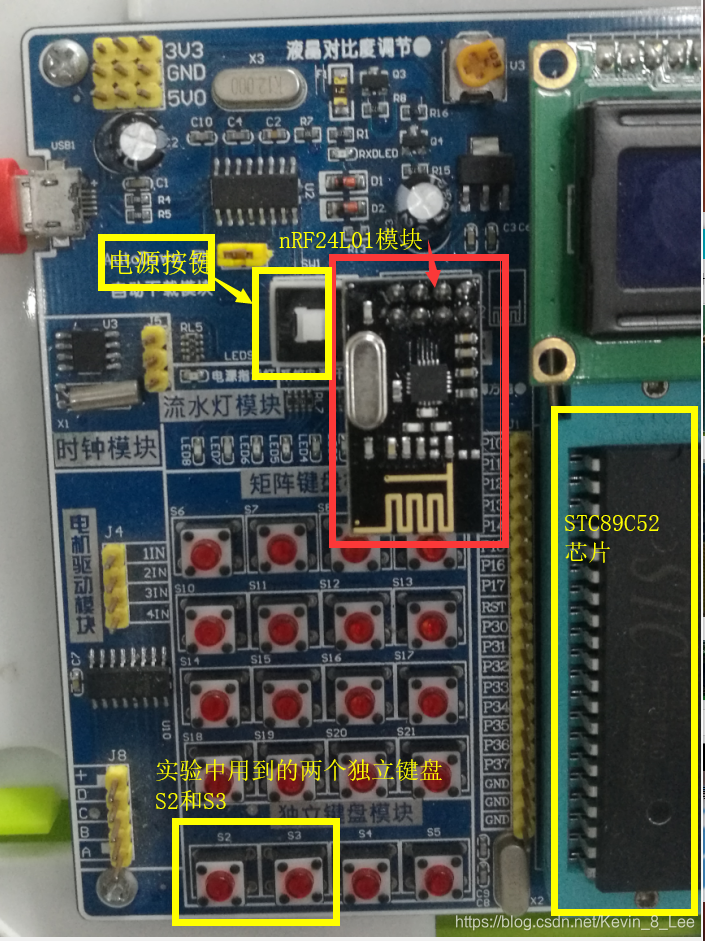
4、 硬件连接实物图(我用的两个相同的51单片机,所以引脚都一样,只是程序里面接收模式和发送模式略微不同)
二、软件部分
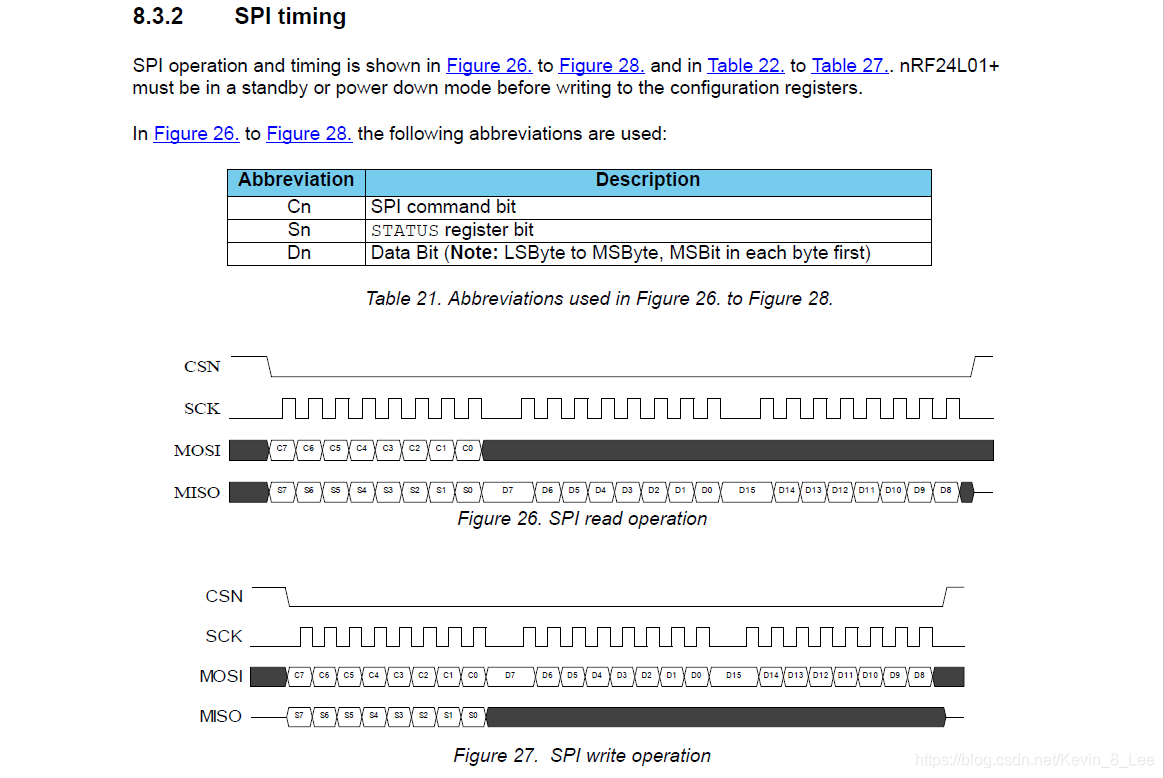
对于某个模块写程序是一定要参照datasheet的时序图, 这样才可以保证不出错。
下面是我从 nRF24L01 datasheet上截的SPI 时序图
变量设置及宏定义 接收端和发射端一样
// 宏定义
#define uchar unsigned char
#define uint unsigned int
#define TX_ADR_WIDTH 5 // 5字节宽度的发送/接收地址
#define TX_PLOAD_WIDTH 4 // 数据通道有效数据宽度
// LED灯及按键位定义
sbit LED = P1^0;
sbit KEY1 = P3^0;
sbit KEY2 = P3^1;
sbit BEEP = P2^3;
uchar code TX_ADDRESS[TX_ADR_WIDTH] = {0x34,0x43,0x10,0x10,0x01}; // 定义一个静态发送地址
uchar RX_BUF[TX_PLOAD_WIDTH];
uchar TX_BUF[TX_PLOAD_WIDTH];
uchar flag;
uchar DATA = 0x01;
uchar bdata sta;
sbit RX_DR = sta^6;
sbit TX_DS = sta^5;
sbit MAX_RT = sta^4;
// NRF24L01 模块引脚位定义
sbit CE = P1^2;
sbit CSN = P1^3;
sbit SCK = P1^7;
sbit MOSI= P1^5;
sbit MISO= P1^6;
sbit IRQ = P1^4;
寄存器设置
/*
SPI(nRF24L01) 指令设置
指令格式
<命令字 : 由高位到低位(每字节)>
<数据字节: 低字节到高字节,每一字节高位在前>
*/
#define READ_REG 0x00 // Define read command to register
#define WRITE_REG 0x20 // Define write command to register
#define RD_RX_PLOAD 0x61 // Define RX payload register address
#define WR_TX_PLOAD 0xA0 // Define TX payload register address
#define FLUSH_TX 0xE1 // 清除 TX FIFO寄存器 应用于发射模式下
#define FLUSH_RX 0xE2 // 清除 RX FIFO寄存器 应用于接收模式下。
#define REUSE_TX_PL 0xE3 // 重新使用上一包有效数据。 当CE=1,数据包被不断重新发射 发射过程中必须禁止数据包重利用功能
#define NOP 0xFF // 空操作。可以用来读状态寄存器
/*
SPI(nRF24L01) registers(addresses)
*/
#define CONFIG 0x00 // 'Config' register address
#define EN_AA 0x01 // 'Enable Auto Acknowledgment' register address
#define EN_RXADDR 0x02 // 'Enabled RX addresses' register address
#define SETUP_AW 0x03 // 'Setup address width' register address
#define SETUP_RETR 0x04 // 'Setup Auto. Retrans' register address
#define RF_CH 0x05 // 'RF channel' register address
#define RF_SETUP 0x06 // 'RF setup' register address
#define STATUS 0x07 // 'Status' register address
#define OBSERVE_TX 0x08 // 'Observe TX' register address
#define CD 0x09 // 'Carrier Detect' register address
#define RX_ADDR_P0 0x0A // 'RX address pipe0' register address
#define RX_ADDR_P1 0x0B // 'RX address pipe1' register address
#define RX_ADDR_P2 0x0C // 'RX address pipe2' register address
#define RX_ADDR_P3 0x0D // 'RX address pipe3' register address
#define RX_ADDR_P4 0x0E // 'RX address pipe4' register address
#define RX_ADDR_P5 0x0F // 'RX address pipe5' register address
#define TX_ADDR 0x10 // 'TX address' register address
#define RX_PW_P0 0x11 // 'RX payload width, pipe0' register address
#define RX_PW_P1 0x12 // 'RX payload width, pipe1' register address
#define RX_PW_P2 0x13 // 'RX payload width, pipe2' register address
#define RX_PW_P3 0x14 // 'RX payload width, pipe3' register address
#define RX_PW_P4 0x15 // 'RX payload width, pipe4' register address
#define RX_PW_P5 0x16 // 'RX payload width, pipe5' register address
#define FIFO_STATUS 0x17 // 'FIFO Status Register' register address
1 简介一下 Enhanced ShockBurstTM发射流程
A. 把接收机的地址和要发送的数据按时序送入NRF24L01;
B. 配置CONFIG寄存器,使之进入发送模式。
C. 微控制器把CE置高(至少10us),激发NRF24L01进行Enhanced ShockBurstTM发射;
D. N24L01的Enhanced ShockBurstTM发射
(1) 给射频前端供电;
(2) 射频数据打包(加字头、CRC校验码);
(3) 高速发射数据包;
(4) 发射完成,NRF24L01进入空闲状态。
********** ** 发射端代码 ** *********
1) 首先初始化IO口
// 初始化IO
void init_io(void)
{
CE = 0; // 待机
CSN = 1; // SPI禁止
SCK = 0; // SPI时钟置低
IRQ = 1; // 中断复位
LED = 1; // 关闭指示灯
}
2) 通过SPI对24L01进行读写的函数 返回读取的字节
uchar SPI_RW(uchar byte)
{
uchar bit_ctr;
// output 8-bits
for (bit_ctr = 0; bit_ctr < 8; bit_ctr++)
{
MOSI = (byte & 0x80); // output ‘byte’ MSB to MOSI
byte = (byte << 1); // shift next bit into MSB..
SCK = 1; // Set SCK high.. 24L01 read 1-bit from MOSI and output 1-bit to MISO
byte |= MISO; // capture current MISO bit
SCK = 0; // ..then set SCK low again
}
return (byte); // return read byte
}
3)
通过SPI协议向寄存器reg 写入数据value
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN low, init SPI transaction, start transmitting data
status = SPI_RW(reg); // select register and return status byte
SPI_RW(value); // ..and write value to it..
CSN = 1; // CSN high again, transmission end
return(status); // return nRF24L01 status byte
}
4) 从寄存器reg中读数据 返回读取的数据
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN置低,开始传输数据
SPI_RW(reg); // 选择寄存器
reg_val = SPI_RW(0); // 然后从该寄存器读数据
CSN = 1; // CSN拉高,结束数据传输
return(reg_val); // 返回寄存器数据
}
5) 从reg寄存器读 bytes 个字节
uchar SPI_Read_Buf(uchar reg, uchar *pBuf, uchar bytes)
{
uchar status,byte_ctr;
CSN = 0; // Set CSN low, init SPI tranaction
status = SPI_RW(reg); // Select register to read & return status byte
for (byte_ctr = 0; byte_ctr < bytes; byte_ctr++)
pBuf[byte_ctr] = SPI_RW(0); //逐个字节从nRF24L01读出
CSN = 1; // set CSN high, stop transaction
return(status); // return nRF24L01 status byte
}
6) 往reg寄存器写入 bytes 个字节
uchar SPI_Write_Buf(uchar reg, uchar *pBuf, uchar bytes)
{
uchar status,byte_ctr;
CSN = 0; // Set CSN low, init SPI tranaction
status = SPI_RW(reg); // Select register to write to & return status byte
for (byte_ctr = 0; byte_ctr < bytes; byte_ctr++)
SPI_RW(*pBuf++); // 逐个字节写入nRF24L01
CSN = 1; // Set CSN high again 结束数据传输
return(status); // 返回状态寄存器
}
7) 设置nRF24L01为接收模式的函数,等待接收发送设备的数据包
void RX_Mode(void)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式
delay_ms(150);
CE = 1; // 拉高CE启动接收设备
}
8) 设置nRF24L01为发送模式
void TX_Mode(uchar *BUF)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写入发送地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 为了应答接收设备,接收通道0地址和发送地址相同
SPI_Write_Buf(WR_TX_PLOAD, BUF, TX_PLOAD_WIDTH); // 写数据包到TX FIFO
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x0a); // 自动重发延时等待250us+86us,自动重发10次
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // CRC使能,16位CRC校验,上电
delay_ms(150);
CE = 1;
}
9) 检查接收设备有无接收到数据包
uchar Check_ACK(bit clear)
{
delay_ms(200);
while(IRQ); // 等待数据接收完成
sta = SPI_RW(NOP); // 返回状态寄存器
if(TX_DS)
{
LED0 = ~LED0;
delay_ms(200);
LED0 = ~LED0;
delay_ms(200);
LED0 = ~LED0;
delay_ms(200);
}
if(MAX_RT)
if(clear) // 是否清除TX FIFO,没有清除在复位MAX_RT中断标志后重发
SPI_RW(FLUSH_TX);
SPI_RW_Reg(WRITE_REG + STATUS, sta); // 清除TX_DS或MAX_RT中断标志
IRQ = 1;
if(TX_DS)
return(0x00);
else
return(0xff);
}
10) 按键扫描
// 按键扫描
void CheckButtons()
{
if(KEY1 == 0)
{
delay_ms(10);
if(KEY1 == 0)
{
while(!KEY1);
TX_BUF[0] = 1; // 数据送到缓存
TX_Mode(TX_BUF); // 把nRF24L01设置为发送模式并发送数据
Check_ACK(0); // 等待发送完毕,清除TX FIFO
delay_ms(250);
delay_ms(250);
}
}
if(KEY2 == 0)
{
delay_ms(10);
if(KEY2 == 0)
{
while(!KEY2);
TX_BUF[0] = 2; // 数据送到缓存
TX_Mode(TX_BUF); // 把nRF24L01设置为发送模式并发送数据
Check_ACK(0); // 等待发送完毕,清除TX FIFO
delay_ms(250);
delay_ms(250);
}
}
}
11) 主函数
void main(void)
{
init_io(); // 初始化IO
while(1)
{
CheckButtons(); // 按键扫描
}
}
2 Enhanced ShockBurstTM接收流程
A. 配置本机地址和要接收的数据包大小;
B. 配置CONFIG寄存器,使之进入接收模式,把CE置高。
C. 130us后,NRF24L01进入监视状态,等待数据包的到来;
D. 当接收到正确的数据包(正确的地址和CRC校验码),NRF2401自动把字
头、地址和CRC校验位移去;
E. NRF24L01通过把STATUS寄存器的RX_DR置位( STATUS一般引起微
控制器中断 )通知微控制器;
F. 微控制器把数据从 NewMsg_RF2401 读出;
G. 所有数据读取完毕后,可以清除STATUS寄存器。NRF2401可以进入
四种主要的模式之一。
接收端代码和发射端是一样的
注意发射端地址和接收端地址一致即可
接收端主函数
void main(void)
{
init_io(); // 初始化IO
RX_Mode(); // 设置为接收模式
while(1)
{
sta = SPI_Read(STATUS); // 读状态寄存器
//delay_ms(200);
if(RX_DR) // 判断是否接受到数据
{
SPI_Read_Buf(RD_RX_PLOAD, RX_BUF, TX_PLOAD_WIDTH); // 从RX FIFO读出数据
flag = 1;
}
SPI_RW_Reg(WRITE_REG + STATUS, sta); // 清除RX_DS中断标志
if(flag) // 接受完成
{
if(RX_BUF[0] == 1)// KEY1按下 则蜂鸣器 响1下
{
BEEP = 0;
delay_ms(500);
BEEP = 1;
delay_ms(500);
}
if(RX_BUF[0] == 2) // KEY2按下 蜂鸣器响3下
{
BEEP = 0;
delay_ms(500);
BEEP = 1;
delay_ms(500);
BEEP = 0;
delay_ms(500);
BEEP = 1;
delay_ms(500);
BEEP = 0;
delay_ms(500);
BEEP = 1;
delay_ms(500);
}
flag = 0; // 清标志
delay_ms(250);
delay_ms(250);
LED = 1; // 关闭LED
}
}
}
上面的代码很详尽了,想要完整工程的可以下载----->>>完整代码工程文件(接收端+发射端)
凡事不要说“我不会”或“不可能”, 因为你根本还没有去做! 加油吧

 浙公网安备 33010602011771号
浙公网安备 33010602011771号