


足式机器人和无缘轮(rimless wheels)之间的联系
在网上一篇论文看到了一张图,这张图很好的解释了关于足式机器人和无缘轮之间的联系:
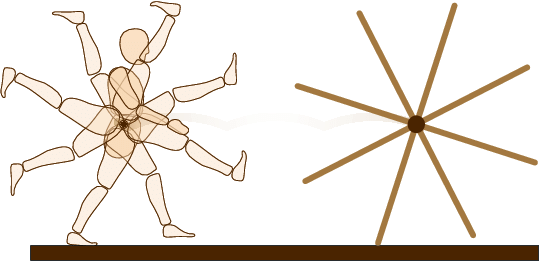
(figure 5) at a first glance, the center of a rolling rimless wheel roughly accounts for
the motion the hip.
passive walkers are designed from a completely different control perspective [collins et al., 2005]. they are minimally actuated. the mechanical design is devised to take advantage of the gravity and to convert potential energy into kinetic energy. in its simplest version, the passive walker is made of two articulated legs connected to the hip [collins et al., 2001]. it can be modeled as a compass whose gaits induced a motion of the hip that is the same as the motion of the center of a rimless wheel. at that stage, it is noticeable that the motion of the center of a rimless wheel seems to be a rather good approximation of the hip motion in human walking (figure 5). the analogy is part of the yoyo-man project rational.
论文链接如下:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号