E-PUCK机器人-开始
EPUCK机器人附带标准固件,可让您立即与机器人交互,请按照下列步骤操作:
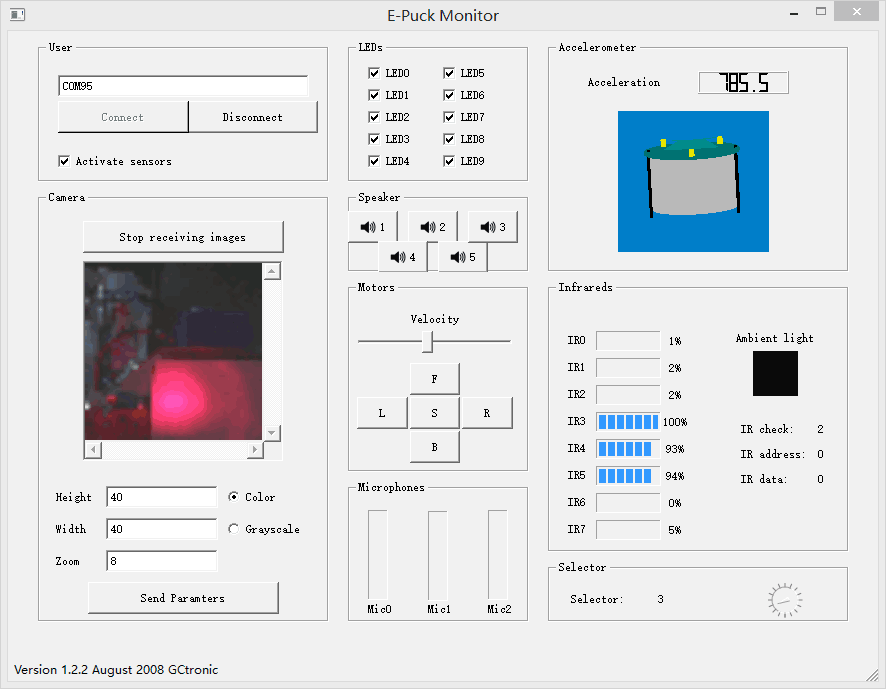
- 将机器人选择器置于位置3
- 打开机器人并将其与计算机配对
- 下载windows可执行文件;
- 打开蓝牙设置,查看蓝牙生成的虚拟串口号;

- 在User栏里面输出COM口号:例如:COM95,点击“connect”;如图所示:
如果您正在运行Linux,请使用系统蓝牙管理器将机器人与计算机配对,然后发出命令
sudo rfcomm bind / dev / rfcomm0 10:00:E8:C5:61:C9
其中10:00:E8:C5 :61:C9是机器人的BT mac地址
如果您正在运行Windows,请参阅e-puck.org教程中的详细指南,这里是BTboot epuck指南文档链接(参见第2.3章,第6页)
执行终端程序(例如minicom)并配置与115200-8N1的连接。串行设备路径通常应该类似于“/ dev / rfcomm0”。确保称为“硬件”的minicom的流量控制参数设置为“否”
键入h + ENTER,系统将提示您包含可以向机器人发出的所有命令的菜单,例如,您可以检索传感器值或打开LED指示灯
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号