PhantomX Pincher Arm---设置ArbotiX和Arduino软件
设置ArbotiX-M的主要部分如下:
- 安装Arduino IDE
- 安装FTDI驱动程序
- 安装ArbotiX-M硬件和库文件
- 连接您的ArbotiX-M Robocontroller
- 编程ArbotiX-M Robocontroller
步骤1:下载并安装Arduino IDE
ARDUINO 1.0.6软件下载
Arduino IDE(集成开发环境)是一个应用程序,您可以使用它来编写ArbotiX-M等基于Arduino的微控制器并与之交互.ArbotiX-M库已经过Arduino 1.0.6的全面测试。当前库不支持旧版本的Arduino(beta 18-23)或Arduino 1.6。用户可以下载压缩的Arduino IDE并将其解压缩到他们选择的位置。Windows用户还可以使用Windows Installer自动执行此过程。安装Arduino IDE后,打开程序。这将生成一个“Arduino”用户文件夹,您将在步骤3中使用该文件夹。
步骤2:安装FTDI驱动程序
现在您需要安装FTDI驱动程序。这些驱动器将允许您的FTDI-USB电缆或UartSBee正常运行。一些现代操作系统要么具有这些驱动程序,要么可以自动找到它 如果您没有驱动程序或者您不确定,可以在此处找到FTDI驱动程序,以及在此处安装它们的指南。
注意:Windows用户可以下载驱动程序并通过Windows硬件向导进行安装,或者单击“安装可执行文件”链接自动执行该过程。
第3步:安装ArbotiX-M硬件和库文件
为了支持ArbotiX-M的Arduino IDE,我们需要将文件添加到Arduino用户文件夹中。单击此处下载所需的ArbotiX-M库和硬件文件,在这个.zip文件中,将有3个文件夹</>
- 硬件 - 这个文件夹包含所有硬件定义,允许Arduino IDE在ArbotiX-M上为ATMega644p构建程序。该文件夹还包含AVRSTK500串行编程器的定义。
- 库 - 这个文件夹包含的库可以帮助您充分发挥ArbotiX-M的潜力。许多这些库都需要为InterbotiX机器人编译程序。点击此处了解有关各个ArbotiX-M库的更多信息。
- ArbotiX草图 - 这个文件夹包含各种ArbotiX-M项目和InterbotiX机器人的测试代码和示例代码。
要安装ArbotiX-M文件,您需要将这3个文件夹移动到“Arduino”用户文件夹中。这不是 Arduino IDE本身所在的文件夹。此文件夹的位置将根据您的操作系统而有所不同。
Windows XP
My Documents\Arduino\
Windows Vista/7
Documents\Arduino\
Mac/Linux
~/Documents/Arduino/
其中“〜”表示用户帐户的路径。
如果您在查找“Arduino”文件夹时遇到问题,请打开Arduino IDE并打开“首选项”面板(文件 - >首选项)。在这里,您将找到“Sketchbook location:”下的文件路径。这是“Arduino”文件夹的路径。
完成后,您的文件路径应如下图所示:
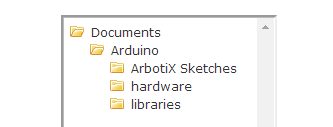
如果你有一个库或硬件文件夹,只需将ArbotiX-M Libary / Hardware文件夹的内容复制到'Arduino'文件夹中的库/硬件文件夹中。你的文件夹结构应该如上所示,以及你的预安装的文件。
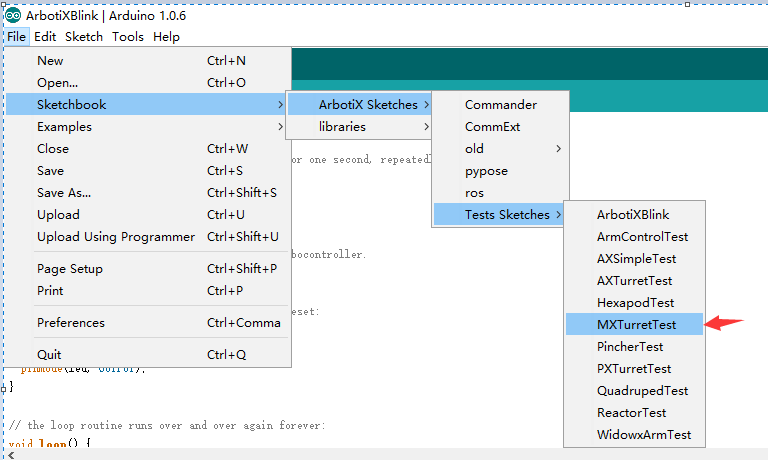
下载代码
File->Sketchbook->ArbotiX Sketches->Tests Sketches ->MXTurretTest
加载程序后,请确保您的机器人由 12v 电源供电,并且电源跳线设置为"VIN"。
一旦机器人被编程和供电,它将移动到一个"中心位置",其中每个伺服喇叭是在其中心位置。当机器人开始构建检查时,您需要等待 5 秒。机器人应该以一定方式移动。
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号