在 Android 原生开发中,3D 渲染往往被视为一个“黑盒”——模型能显示出来似乎就大功告成。但真正进入 XR、数字孪生或 GIS 三维项目后,你会发现渲染只是冰山一角。本文将深度解析 Sceneform-EQR,一套基于 Filament 的 Android 原生三维工程化样本,它正试图将零散的三维能力整合为一条从入门到工程落地的完整学习路径。
从“能显示模型”到“能做三维应用”
很多 Android 开发者第一次接触 3D 时,都会觉得:“模型能显示出来,好像就差不多了。” 但真正开始做项目后,才会发现,渲染只是最开始的一步。模型加载、材质系统、光照环境、手势交互、视频纹理、相机流、AR Session、平面检测、生命周期管理、资源释放、线程调度……这些能力一旦组合起来,整个工程复杂度会迅速提升。尤其是在 Android 原生体系下,3D 往往不是一个独立模块,而是需要同时与 Activity 生命周期、相机权限、媒体播放、OpenGL/Vulkan 渲染、ARCore / AREngine、传感器与 XR 交互一起协同工作。而 Sceneform-EQR 想解决的,正是这部分问题。
它并不是一个“展示模型”的 Demo,而更像是一套 Android 原生三维工程化样本。框架整体延续了 Sceneform 的使用习惯,底层基于 Filament,目前已经覆盖:
- 普通 3D 场景
- GLTF / GLB 模型
- ARCore / AREngine
- VR 场景
- 360 全景视频
- 视频纹理
- 相机流
- PLY 点云
也就是说,它已经不再只是“加载一个模型”,而是开始逐步形成 Android XR 场景里的完整能力链。
示例工程重新整理:从“功能堆叠”变成“学习路径”
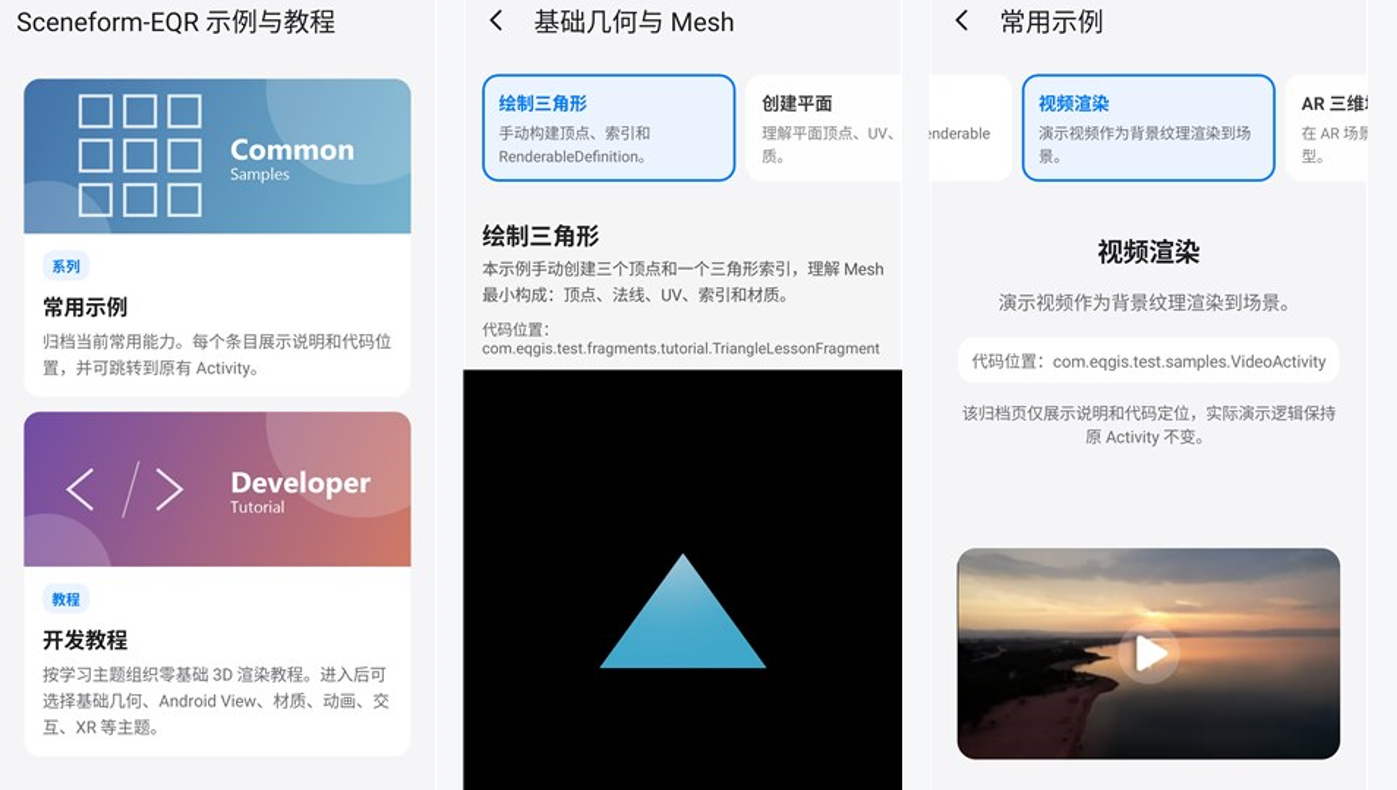
这次示例工程的改版,一个比较明显的变化,是首页开始区分:
- 常用示例
- 开发教程
过去很多三维示例工程都有一个通病:功能很多,但入口是平铺的,开发者第一次打开时很容易迷失方向。这次 Sceneform-EQR 更偏向“学习路径”的组织方式。
常用示例主要用于快速验证能力,包括:
- 普通 3D 手势交互
- 视频渲染
- AR 三维场景
- AR 平面检测
- VR 场景
- 360 全景
- VR 地球示例
- 坐标转换
而 开发教程 则开始从更基础的几何体切入,比如 Triangle、Plane、Cube。这些内容虽然简单,但实际上是理解三维渲染结构最重要的部分:
- 三角形帮助理解顶点、索引、UV、法线、材质等渲染系统里的基础概念。
- Plane更适合理解参考面、透明材质、纹理承载、空间定位。
- Cube则进一步涉及空间关系、光照、阴影、相机观察。
整个示例工程开始更像一个“从 0 到 XR”的学习仓库,而不仅仅是功能展示。每个页面都会明确告诉你:当前功能是什么、对应代码在哪、预览效果是什么、这个示例重点解决什么问题。这对于 Android 原生开发者理解 3D 工程,会轻松很多。

从模型渲染,开始进入真实 XR 场景
如果继续往后看,会发现 Sceneform-EQR 已经不仅是“模型显示”。它开始覆盖越来越多真实 XR 项目中的典型场景。
比如 AR。很多 Demo 的 AR,其实只是“把模型放到摄像头上”。但真正的 AR 场景,需要:平面检测、HitTest 命中测试、Anchor 锚点挂载、世界坐标稳定、跟踪状态管理。模型需要真正进入现实空间,而不是漂浮在屏幕里。
VR 示例则开始涉及:SceneViewType 双目渲染、相机视场角、全景纹理、沉浸式观察。尤其是 360 全景视频部分,本质上已经进入“视频 + XR”融合场景。
视频纹理示例也很有代表性。它把 Android 原生媒体播放能力,与 Filament 外部纹理连接到一起。这里其实已经涉及:SurfaceTexture、ExternalTexture、视频解码、GPU 纹理同步。这类能力在 XR 视频播放器、MR 场景、虚拟大屏、空间视频里都会大量使用。

实践建议:如果你正在用 Java 或 Kotlin 开发 Android XR 应用,建议先从视频纹理示例入手,因为它能帮你快速理解外部纹理与渲染管线的协作机制。后续再用 C++ 或 Python 做后处理时,你会更容易理解 GPU 数据流的本质。
[AFFILIATE_SLOT_1]点云与 GIS:开始进入“数据型三维”
我觉得 Sceneform-EQR 里一个比较有意思的方向,是它已经开始不局限于传统模型。比如:
- PLY 点云
- GIS 坐标转换
这些内容其实已经进入“数据型三维”的范畴。这类数据通常体积更大,对排序、内存、渲染方式、线程调度、Renderable 数据结构都更敏感。很多问题已经不是“模型能不能显示”,而是“Android 设备能不能稳定跑起来”。
所以在示例中,也开始能看到一些更偏工程化的问题:
- Renderable 生命周期
- MaterialInstance 管理
- Entity 销毁顺序
- 数据线程加载
- 内存释放
包括近期版本里:
- Filament 已升级到 v1.67.1
- 修复 MaterialInstance 释放问题
- 修复 Node 销毁时 Material 与 Entity 顺序问题
- 修复 CoordinateUtils NaN 问题
这些内容其实已经很接近真实项目开发。而 坐标转换示例,则补上了 GIS 与数字孪生里非常关键的一环:地理坐标、世界坐标、模型坐标与屏幕坐标之间如何映射。这个能力在数字孪生、GIS、AR 导航、实景融合、空间定位里都非常重要。因为很多时候,真正困难的不是“渲染”,而是“三维内容如何与真实数据对齐”。
 ⚠️ 注意事项:处理点云数据时,建议使用 TypeScript 或 JavaScript 做前端可视化原型,再用原生模块做性能优化。同时注意线程调度——在 Android 上,主线程不应处理大量点云排序,务必使用 AsyncTask 或 Coroutine。
[AFFILIATE_SLOT_2]
⚠️ 注意事项:处理点云数据时,建议使用 TypeScript 或 JavaScript 做前端可视化原型,再用原生模块做性能优化。同时注意线程调度——在 Android 上,主线程不应处理大量点云排序,务必使用 AsyncTask 或 Coroutine。
[AFFILIATE_SLOT_2]
写在最后
现在再回头看 Sceneform-EQR,更想做成一个 Android 原生 XR 能力集合。里面既有基础三维渲染,也有 AR、VR、视频、点云、GIS 等逐渐偏工程化的内容。
如果你的方向是:
- Android 原生 3D
- AR 场景开发
- VR / XR
- 数字孪生
- GIS 三维
- 点云与扫描数据
- Android 端 Filament 渲染
那么 Sceneform-EQR 其实是一个很值得研究的工程样本。因为它真正有价值的地方,不只是“能渲染”,而是:它正在尝试把 Android 三维开发,整理成一套更接近原生工程习惯的体系。



 浙公网安备 33010602011771号
浙公网安备 33010602011771号