

哈喽各位,我是前端小L。
欢迎来到我们的图论专题第二十五篇!想象一下,你是城市的规划师,要在几座城市之间修建高速公路,或者在几个服务器之间铺设光纤。你的目标是:
连通性:任何两个点之间都要能到达。
最小成本:所有修建的路线总长度(费用)之和要最小。
这种结构,在图论中被称为**“最小生成树”**。它是一棵树(没有环,边数最少),且包含了所有顶点,且总权值最小。
今天,我们将用Kruskal 算法来处理这个问题。它的核心逻辑便捷得令人发指:“只选最便宜的边,只要不形成环!”
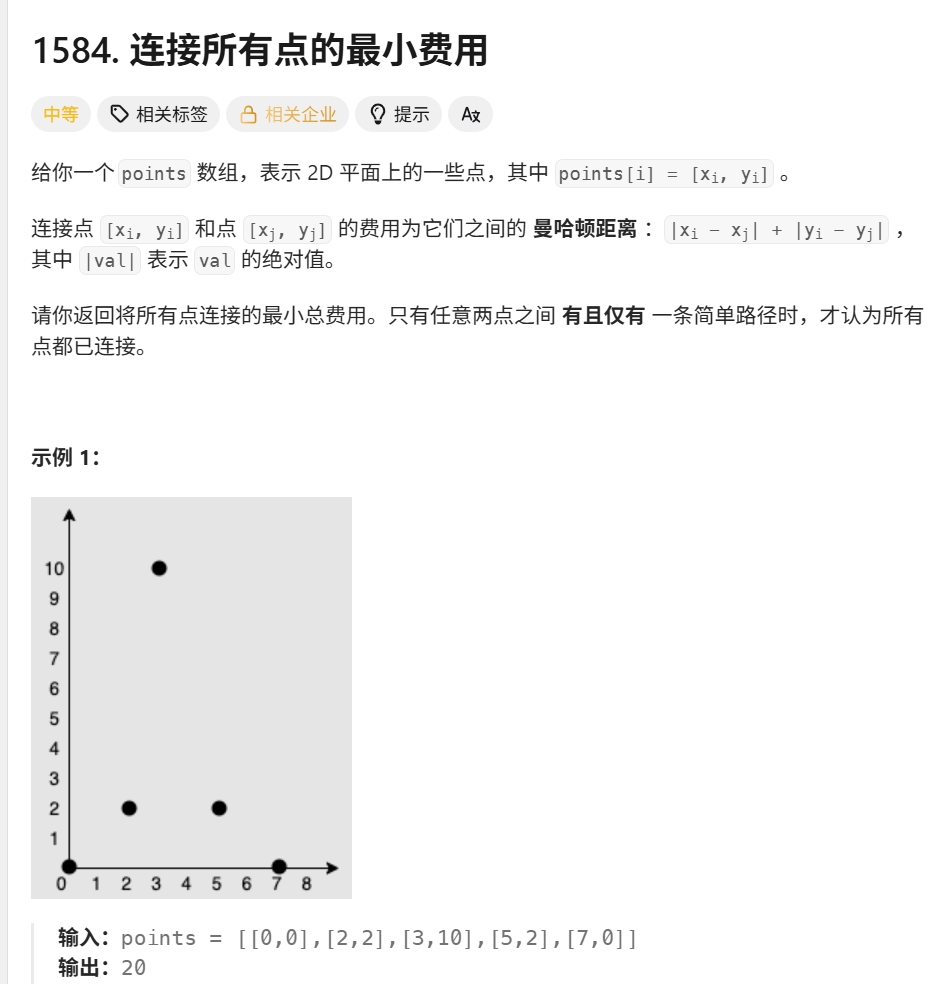
力扣 1584. 连接所有点的最小费用
https://leetcode.cn/problems/min-cost-to-connect-all-points/
题目分析:
输入:
points数组,表示二维平面上点的坐标[xi, yi]。距离:两点之间的连接费用是它们的曼哈顿距离
|xi - xj| + |yi - yj|。目标:连接所有点,使得总费用最小。
核心模型:
这是一个完全图(Complete Graph),任意两点之间都可以连线。我们得从中选出 n-1 条边,构成一棵最小生成树。
解决方案:Kruskal 算法 (基于并查集)
贪心思想的完美体现。就是Kruskal 算法
策略:我们把所有可能的边,按费用从低到高排序。然后依序尝试把这些边加入我们的网络。
核心判断:对于当前这条边 (u, v),假设 u 和 v 已经在同一个连通分量里了(即它们已经利用之前的便宜边连通了),那这条边就是多余的(会形成环),我们跳过它。假设它们还不在一个分量里,我们就选用这条边,并把它们 Union 起来。
算法流程:
生成所有边:
计算任意两点
i和j之间的曼哈顿距离。将边存储为
(cost, i, j)的三元组列表。(注意:对于 N 个点,会有
N*(N-1)/2条边。本题 N <= 1000,边数约 50万,排序没问题。)
排序:
将所有边按
cost从小到大排序。
Kruskal 主循环 (并查集登场):
初始化并查集
uf。遍历排序后的边:
对于边
(cost, u, v):if (uf.find(u) != uf.find(v)):连通!
uf.union(u, v)。totalCost += cost。edgesCount++。
if (edgesCount == n - 1):树已建成,提前结束。
返回
totalCost。
代码实现 (Kruskal)
C++
#include
#include
#include
#include
using namespace std;
// --- 并查集模板 ---
class UnionFind {
public:
vector parent;
UnionFind(int n) {
parent.resize(n);
iota(parent.begin(), parent.end(), 0);
}
int find(int x) {
if (parent[x] != x) {
parent[x] = find(parent[x]);
}
return parent[x];
}
bool unite(int x, int y) {
int rootX = find(x);
int rootY = find(y);
if (rootX != rootY) {
parent[rootX] = rootY;
return true; // 合并成功
}
return false; // 已经在同一个集合,无需合并
}
};
struct Edge {
int u, v, cost;
// 重载 < 运算符,方便排序
bool operator<(const Edge& other) const {
return cost < other.cost;
}
};
class Solution {
public:
int minCostConnectPoints(vector>& points) {
int n = points.size();
vector edges;
// 1. 生成所有边 (稠密图:任意两点都有边)
for (int i = 0; i < n; ++i) {
for (int j = i + 1; j < n; ++j) {
int dist = abs(points[i][0] - points[j][0]) +
abs(points[i][1] - points[j][1]);
edges.push_back({i, j, dist});
}
}
// 2. 排序 (贪心核心)
sort(edges.begin(), edges.end());
// 3. Kruskal 算法
UnionFind uf(n);
int totalCost = 0;
int edgesConnected = 0;
for (const auto& edge : edges) {
// 尝试连接 u 和 v
if (uf.unite(edge.u, edge.v)) {
totalCost += edge.cost;
edgesConnected++;
// 优化:只需要 n-1 条边
if (edgesConnected == n - 1) {
break;
}
}
}
return totalCost;
}
}; 进阶思考:稠密图的更优解 —— Prim 算法
一个就是虽然 Kruskal 算法逻辑清晰,非常适合稀疏图(边少)。但本题完全图(稠密图),边数 $E \approx V^2$。
Kruskal 的瓶颈在排序:$O(E \log E) \approx O(V^2 \log V)$。
Prim 算法:基于节点扩展,类似 Dijkstra。每次找离当前生成树最近的一个节点加入。如果不使用堆,直接用数组扫描,复杂度为 $O(V^2)$。
在 $N=1000$ 的情况下,Prim ($10^6$) 会比 Kruskal ($10^6 \times \log 10^6 \approx 2 \cdot 10^7$) 快不少。
(虽然 Kruskal 能过,但 Prim 是更“专业”的选择。)
Prim 算法简述 (数组版):
dist[i]记录节点i到当前生成树的最小距离。初始化为 $\infty$,dist[0]=0。循环
n次:找到当前未访问节点中
dist最小的节点u。将
u标记为已访问,加入生成树,累加dist[u]。松弛:用
u去更新所有未访问邻居v的dist[v]:dist[v] = min(dist[v], weight(u, v))。
总结:图论世界的“基建工程”
今天,我们攻克了图论中最经典的“最小生成树”问题。
并查集是 Kruskal 算法的灵魂,它高效地帮我们判断了“是否形成环”。
贪心是 MST 的核心,无论是 Kruskal(选最小边)还是 Prim(选最近点),都在贯彻这一思想。
至此,我们结束了“并查集”篇章。从下一篇开始,我们将进入图论的终极篇章——经典算法。我们将挑战Dijkstra,去解除比 MST 更复杂的“带权最短路径”问题。
下期见!


 浙公网安备 33010602011771号
浙公网安备 33010602011771号