

分类
- 标准地图SDmap(Standard Definition map)- 精度1-10米
- 车道级地图LDmap(Lane Definition map)- 精度0.1-1米
- 高精度地图HDmap(High Definition map)- 精度5-20厘米
HD-MAP
高精度地图(High Definition Map,简称HD Map)是一种基于先进的测绘技术和高精度定位数据,提供精确、详细道路信息及环境感知数据的数字地图。它不仅包含传统地图所具备的主要地理信息,还提供更为细致的车道级别几何形状、交通规则、交通标识、交通流量等详尽数据。其核心特点包括:
- 高精度定位:高精度地图依赖于精确的定位科技,如全球卫星导航系统(GNSS)、惯性测量单元(IMU)和激光雷达等传感器数据,实现对车辆位置的高精度定位。
- 车道级别信息:高精度地图供应车道级别的详细信息,包括车道数量、车道宽度、车道标线、限速标识等,帮助车辆进行精准路径规划和决策。
- 动态数据更新:高精度地图支持实时或定期更新,及时反映道路变化、施工区域、交通事故等动态信息,确保地图数据的准确性和时效性。
- 环境感知数据:高精度地图提供丰富的环境感知数据,如障碍物位置、形状、类型等,为车辆的智能决策和行驶安全提供要紧参考。
- 数据标准化:为了实现高精度地图的互操作性和共享性,制定统一的数据标准是必要的,以确保不同地图提供商生成的地图材料可能无缝集成和使用。
高精度地图要素的数据模型主要分为四大类,分别是道路模型、车道模型、道路标记模型、基本对象模型。
数据格式
OpenDRIVE是指一种用于描述道路网络的通用标准格式,文件后缀为xodr,采用可扩展标记语言(XML)编写。它主要目的是为驾驶模拟和自动驾驶场景提供精确的静态路网描述,便于在不同平台和设备之间交换和采用。
数据交换
1. 核心问题澄清:存储 vs. 交互
第一,大家必须明确一个关键区别:
HD Map存储格式:指的是高精地图数据在数据库或文件系统中如何被持久化保存数据的完整性、描述精度和存储效率。就是的底层数据模型和文件格式。它关注的
HD Map交互协议:指的是地图数据在车内不同电子控制单元(ECU)之间如何被传输、访问和实时更新的通信规范。它关注的是通信效率、实时性和安全性。
OpenDRIVE属于前者(存储格式),ADASIS v3属于后者(交互协议)。它们处于技术栈的不同层级。
2. 欧洲市场的主要存储格式:OpenDRIVE
欧洲乃至全球范围内最主要、最权威的HD Map静态数据存储与描述格式之一。就是是的,OpenDRIVE
2.1 什么是OpenDRIVE?
定义:由ASAM协会维护的一个开放资料标准。
目的:用于精确描述道路网络及其相关属性。它本质上是一种基于XML的建模语言,用来为道路网络建立详细的、可计算的模型。
核心内容:OpenDRIVE像一个相当详尽的“工程图纸”,它描述:
道路几何:运用参考线和精确的数学参数(如多项式)定义道路的中心线形状。
车道模型:每个车道的宽度、类型(行车、路肩、人行道)、边界线类型(实线、虚线)。
道路特征:交通标志、信号灯、护栏、路面标记等的精确位置和属性。
拓扑关系:道路如何连接(路口、匝道),车道之间的连通性。
对象:道路上的静态物体。
2.2 为什么OpenDRIVE在欧洲占据主导?
源于欧洲:其最初由德国VIRES公司开发,后被ASAM接管,在欧洲汽车工业界有深厚的根基。
高精度与丰富性:其基于参考线的几何描述方式非常适合进行车辆动力学仿真和精确的路径规划,这与欧洲主机厂和供应商对工程严谨性的要求高度契合。
仿真领域的标准驾驶模拟器(如VIRES VTD, IPG CarMaker)的就是:OpenDRIVE事实标准。由于仿真测试是自动驾驶制作的关键环节,这使得OpenDRIVE自然成为了数据链上游的起点。
行业认可:几乎所有主流图商(HERE, TomTom, 四维图新)和主机厂(大众、宝马、戴姆勒等)都支持生成或使用OpenDRIVE格式的地图素材。
其他格式的补充:
NDS:另一种关键的格式,它更侧重于导航地图的存储、编译和增量更新,在车载IVI系统中广泛应用。NDS也在向高精地图演进,并与OpenDRIVE存在一定的竞争与合作关系。但在欧洲,对于底层的高精度道路模型描述,OpenDRIVE的工程优势更为明显。
OpenLABEL:作为OpenDRIVE的补充,用于描述动态场景和标注。
PS:
- OpenDRIVE:聚焦ADAS 与仿真测试场景,侧重 “高精度静态数据 + 测试兼容性”,例如奥迪的 L3 自动驾驶系统中,HD Map 的车道级静态数据(如弯道曲率、车道宽度)以 OpenDRIVE 格式存储,用于与激光雷达、IMU 的定位匹配及仿真验证(如 ASAM 会议中 “OpenDRIVE 与 NDS 数据交换” 议题,本质是场景适配需求);
- NDS(Navigation Data Standard):聚焦车载导航场景(如 IVI 框架),侧重 “道路网拓扑 + POI 信息”,例如宝马、奔驰的车载导航 HD Map 采用 NDS 格式存储,用于路径规划与导航指引,精度为米级至亚米级(低于 OpenDRIVE 的厘米级静态数据精度)。
- 简言之,欧洲 HD Map 在 “ADAS 功能开发与测试” 中以 OpenDRIVE 为主,在 “用户导航” 中以 NDS 为辅,两者通过数据转换设备(如 ASAM 会议提及的交互方案)实现协同。
3. ADASIS v3:车内的实时数据交互协议
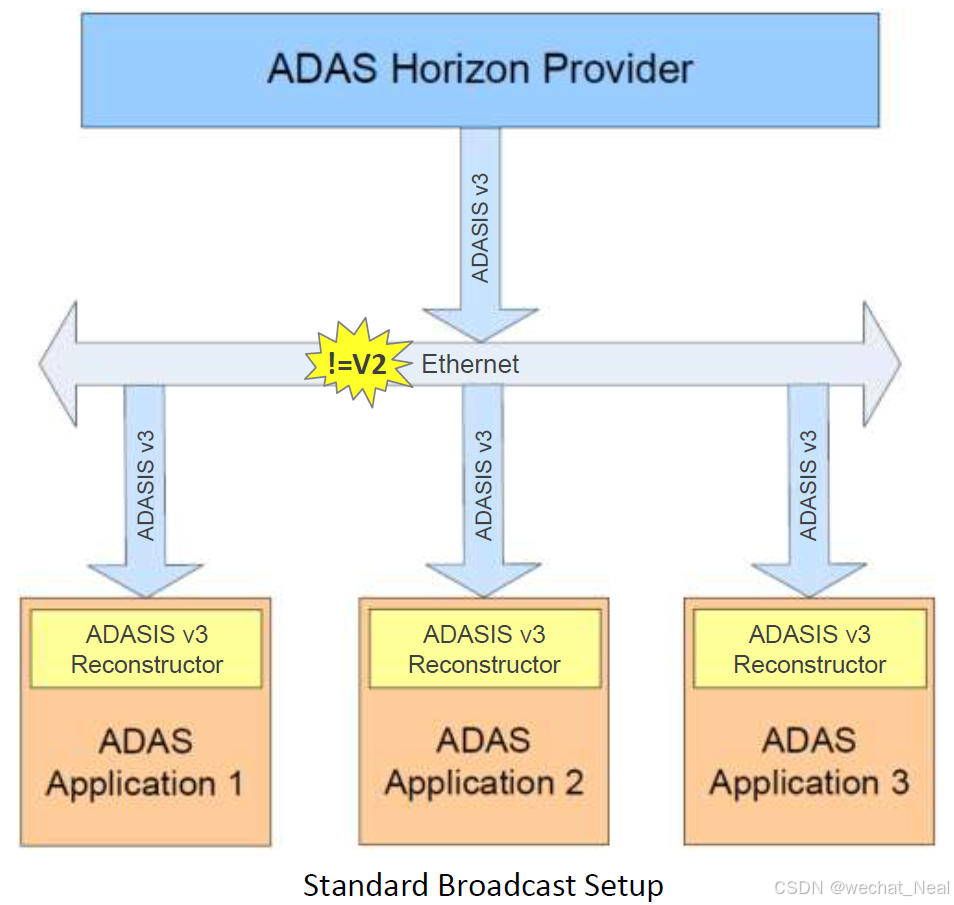
一个就是正如前一篇博客所详述,ADASIS v3协议,它定义了地图数据如何从ADAS域控制器(服务器)分发到其他客户端(如IVI)。
它不关心信息的最终存储格式。ADAS域控制器内部允许使用OpenDRIVE数据库,也可以使用其他专有格式的数据库。
它的职责是:当车辆行驶时,ADAS域控制器根据自己的OpenDRIVE数据库、车辆定位和规划路径,动态地生成一条“前方路径”的摘要信息(即“垂直切片”),并经过ADASIS v3协议广播出去。
ADASIS(汽车数据与服务接口标准化组织)制定的 V3 协议,是专门针对HD Map 数据的车载传输优化协议,核心解决两大痛点:
- 降低传输带宽:HD Map 数据量庞大(如 100km 路段的 OpenDRIVE 静态数据约 100MB),ADASIS V3 通过 “增量传输”(仅更新变化的车道材料,如临时施工路段)和 “数据压缩”(对道路几何参数编码优化),将传输带宽需求降低 60% 以上,适配欧洲车载以太网的实时性要求;
- 确保功能安全:支持内容校验(CRC 校验)与加密传输,符合 ISO 26262 功能安全标准,避免 HD Map 数据在传输中被篡改(如车道线位置错误导致 LKA 能力失效),这是欧洲 L3 自动驾驶量产的强制要求。
4. OpenDRIVE与ADASIS v3的关系:一个完美的协作流程
它们的关系可以用一个生动的比喻和流程图来理解:
比喻:
OpenDRIVE 就像是国家图书馆里完整的、浩如烟海的藏书(完整的HD Map数据库)。
ADAS域控制器 就像是图书管理员。
ADASIS v3 就像是管理员提供的一项“文献传递服务”。
IVI系统 就像是一个读者。
读者(IVI)不需、也无法一次性读完所有藏书(OpenDRIVE)。他只需要告诉管理员(ADAS域控制器):“我正沿着这条路走,请把前方几公里内每段路的重点信息摘要(ADASIS v3切片)发给我。” 管理员就会根据完整的藏书(查询OpenDRIVE数据库),整理出摘要,并经过传递服务(ADASIS v3协议)发送给读者。
HD Map 数据的流转路径清晰体现两者关系:
- 存储层:HD Map 的静态数据(车道几何、路面属性)以 OpenDRIVE 格式存储在车载本地服务器(或云端);
- 传输层:当 ADAS 域控制器(如博世提供的域控)需要调用 HD Map 数据时,系统通过ADASIS V3 协议,将 OpenDRIVE 格式的静态数据(如当前路段的弯道曲率)压缩、加密后,传输至域控制器;
- 应用层:域控制器解析 ADASIS V3 传输的材料,结合激光雷达的实时点云,与 OpenDRIVE 格式的静态地图匹配,实现厘米级定位,支撑 LKA(车道保持)、ACC(自适应巡航)的决策控制。
简言之:OpenDRIVE 定义 “HD Map 数据如何存”,ADASIS V3 定义 “存好的数据如何传”,两者共同构成欧洲 HD Map 在 ADAS 场景中的 “存储 - 传输” 核心链路,缺一不可。
数据生产与存储层:
主要格式:OpenDRIVE。
角色:作为图商生产和高精地图数据的权威、精确的底层存储和交换格式。它确保了从仿真到实车,数据模型的一致性。
车端数据服务与交互层:
核心协议:ADASIS v3。
角色:作为车内实时地图数据分发的“血管”和“神经”。它定义了一个标准化的接口,让IVI等系统能够安全、高效地获取到来自ADAS域的高精地图信息摘要。
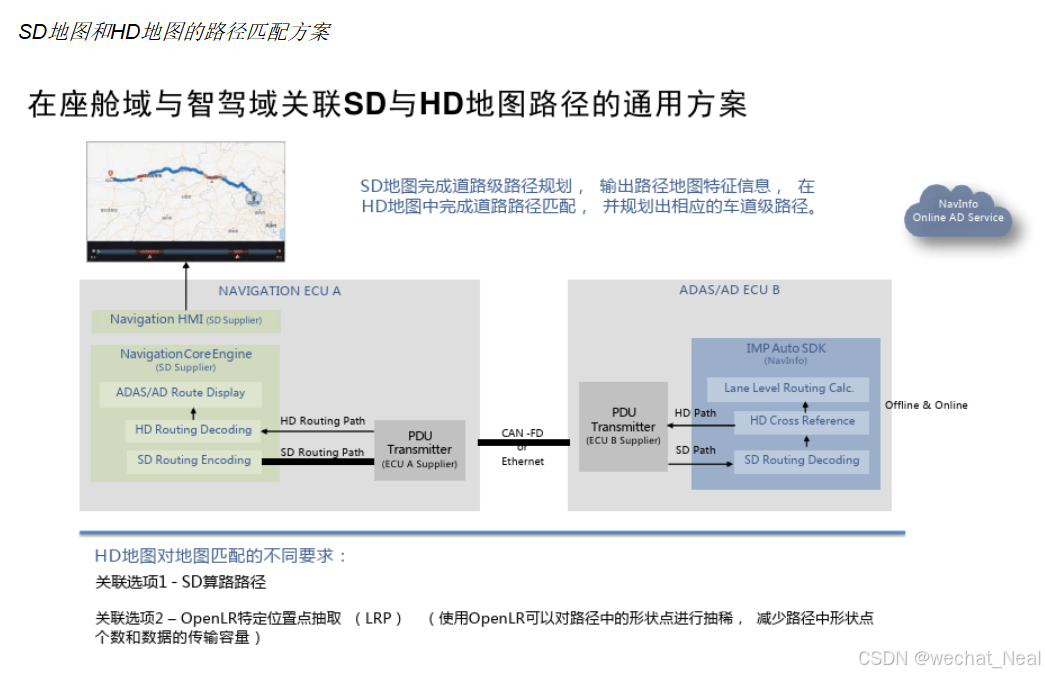
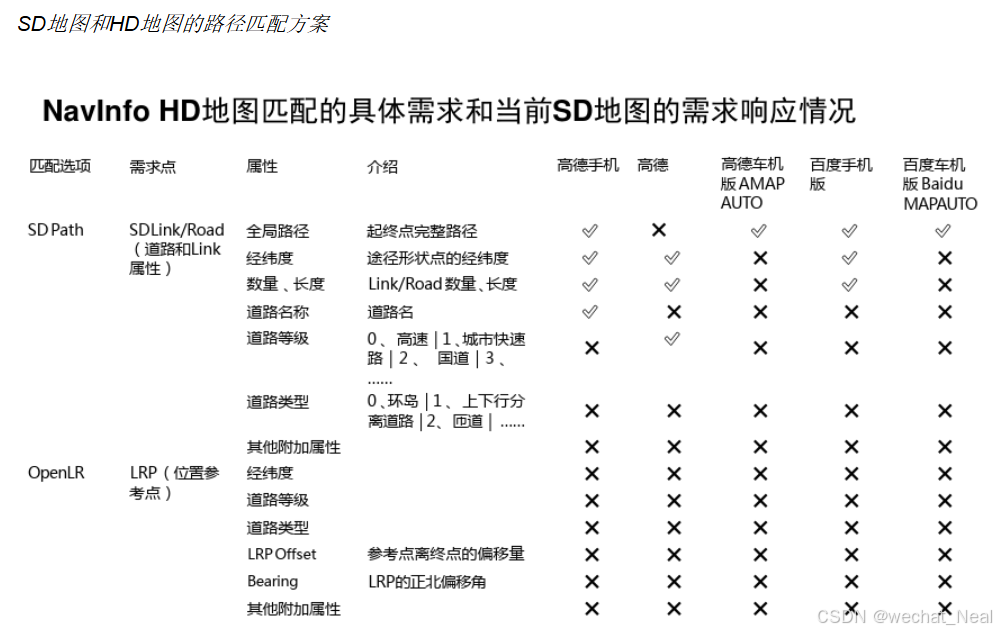
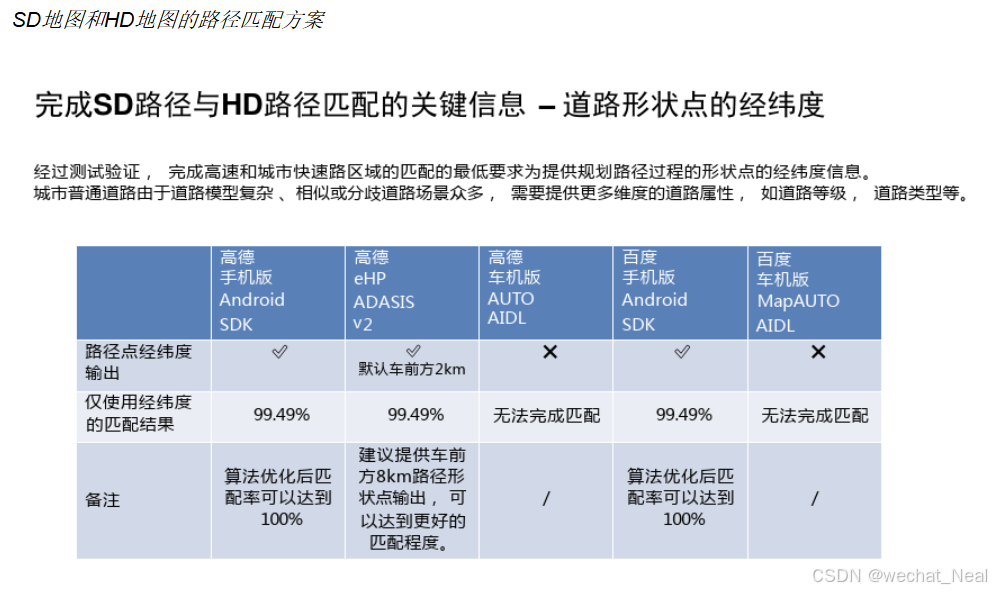
SD Map adapt:
Reference:
https://www.mianfeiwendang.com/doc/16ba343524f07a21289f814c65ab23e857613c1f/8


 浙公网安备 33010602011771号
浙公网安备 33010602011771号