

GNSS定位基本原理
卫星持续发射包含时间戳和星历的射频信号。
接收机同步捕获至少四颗卫星的信号,测量传播时间 → 计算伪距。
依据已知卫星坐标和伪距,求解后方交会方程,得到三维位置和时间校正。
如需更高精度,进一步进行差分或载波相位处理。
1、系统组成
空间段:若干颗运行在中高轨道的导航卫星(如 GPS、北斗、GLONASS、伽利略),每颗卫星都携带高精度原子钟并定期广播星历(Ephemeris)和时间信息。
控制段:地面监控站负责卫星轨道、时钟的校准以及信号参数的更新。
用户段:地面或空中的 GNSS 接收机,负责接收卫星信号并进行位置计算。
2、信号测距(伪距)
接收机在同一时刻接收到多颗卫星的射频信号。信号中携带的时间戳与接收机本地时钟的差乘以光速 ,得到伪距 (即卫星到接收机的距离)。
由于接收机时钟误差,伪距中还包含一个未知的时钟偏差 。
3、后方交会(三角定位)
已知每颗卫星的三维坐标 与对应的伪距 ,允许建立如下方程:
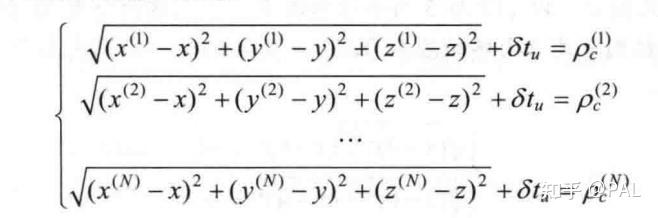
添加图片注释,不超过 140 字(可选)
至少四颗卫星(三维坐标 + 时钟偏差)即可求解出接收机的三坐标 与时钟偏差 。这就是后方交会(trilateration)的核心原理。
4、钟差的来源
GNSS(全球导航卫星系统)中的钟差,指的是卫星端或接收机端的原子钟时间与体系统一时间(GNSS 标准时间)之间的偏差。它是 GNSS 定位、导航和授时误差的主要来源之一,通常分为两类:
类型 | 含义 | 典型大小 | 主要补偿方式 |
|---|---|---|---|
卫星钟差 | 卫星上搭载的原子钟(铷钟、铯钟)时间与 GNSS 系统时间的差值,包含钟差、钟速、钟漂以及随机误差。常用二阶多项式 表示 | 1 ms 以内(对应约 300 km 等效距离误差),广播星历献出的精度约 10 ns(≈3 m),精密产品可达 0.1 ns(≈0.03 m) | 通过导航电文中的钟差参数(a₀、a₁、a₂)进行实时修正;精密单点定位(PPP)使用高精度轨道‑钟差产品 |
接收机钟差 | 接收机内部时钟与 GNSS 标准时间的偏差,影响所有观测卫星的伪距/相位量。 | 通常在 10 ns–100 ns 之间,等效距离误差在 3 m–30 m 左右 | 差分定位(RTK/DGNSS)或 PPP 中把接收机钟差作为待估参数一起求解;也可通过外部授时(如网络授时)校正 |
产生原因
高精度原子钟,也会出现微小的频率偏移(钟速)和漂移(钟漂)。就是原子钟本身的漂移:即使
相对论效应:卫星在高空、敏捷运动导致的时间膨胀和引力势差,需要在制造或软件中预先补偿。
硬件延迟与码相位偏差:不同频率、不同信号的硬件路径差异也会表现为钟差(如 DCB、TGD)。
对定位的影响
伪距观测的等效距离行写成
ρ=c(tr-ts)=cδtr-cδts+几何距离+其他误差
其中 c 为光速,δtr 与 δts分别是接收机和卫星的钟差。要是不加以校正,1 ns 的钟差就会产生约 0.3 m 的距离误差,进而导致定位误差数米甚至十几米。
常用校正手段
广播钟差参数:GNSS 电文中提供的a0,a1,a2 用于实时校正卫星钟差。
精密钟差产品:IGS、iGMAS 等组织发布的高精度轨道‑钟差产品,支持厘米级甚至分米级定位。
差分技术:RTK、网络 RTK 利用基准站的已知坐标和已校正的钟差,消除接收机钟差。
PPP(Precise Point Positioning):在单站点使用精密钟差产品直接估计并消除卫星与接收机的钟差
5、定位误差的来源
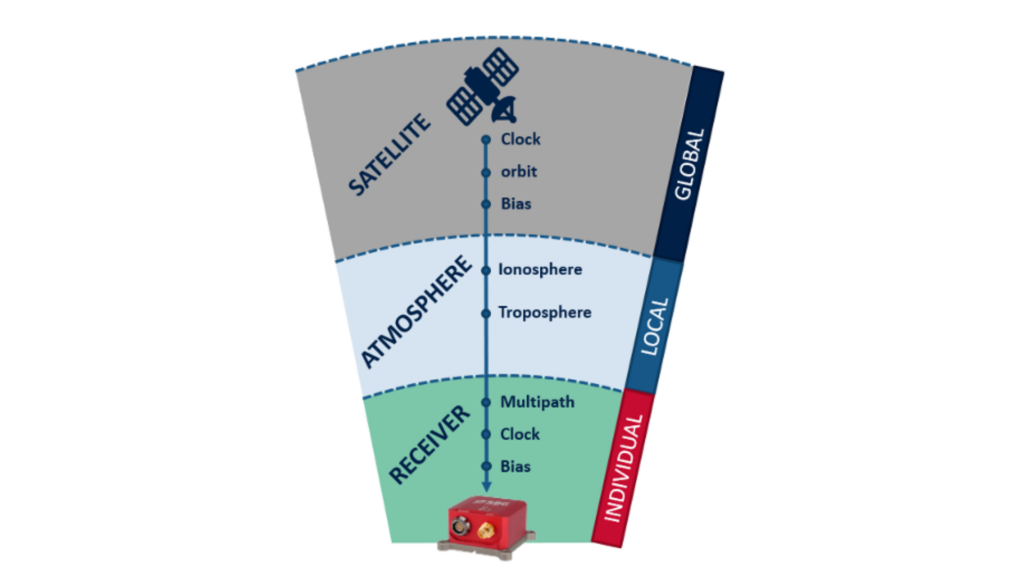
图1 定位误差来源
差分定位技术可能消除
卫星钟差
星历误差
电离层误差
对流层误差
将接收机钟差作为未知数求出
坐标差分可达±5m的精度;RTD可达±(1-3)m级的精度,RTK可达±(1-3)cm的精度,高程精度是平面精度的2-3倍。
6、AGNSS
内容 | 说明 |
|---|---|
定义 | AGNSS 是在传统 GNSS(GPS、北斗、GLONASS、伽利略等)基础上,利用地面或卫星网络向接收机提供辅助信息(如卫星星历、时钟、粗略位置、大气模型等),以加快定位、提升可靠性和精度。 |
工作原理 | 1. 获取辅助信息:移动终端凭借蜂窝、Wi‑Fi、蓝牙或专用卫星链路向服务器请求最新的星历、闰秒、卫星健康等信息。 |
主要优势 | • 显著缩短 TTFF:在弱信号或室内环境下,TTFF 可从数十秒降至 1–2 秒。 |
常见应用 | - 智能手机、车载导航、无人机、物流追踪、紧急定位(eCall) |
实现方式 | 1. 网络辅助(A‑GNSS):通过运营商基站或互联网服务器提供数据。 |
技术挑战 | • 基础设施需求:需要覆盖广泛的网络或卫星广播系统,尤其在偏远地区仍有盲区。 |
最新进展(2024‑2025) | - 硬件集成:Quectel LG290P、LC76G 系列模块在硬件手册中明确支持 AGNSS 功能,提供专用 API 供开发者获取和使用辅助信息。 |
未来趋势 | 1. 多源融合:将 AGNSS 与 5G/6G 边缘计算、视觉里程计、惯性测量单元(IMU)深度融合,实现亚米级甚至厘米级定位。 |
AGNSS 通过在 GNSS 基础上给出实时的辅助信息,显著提升了定位速度、成功率和可靠性,已在移动通信、车载、铁路、无人机等多个领域得到广泛应用。随着 5G/6G 网络、深度学习算法以及新一代低功耗硬件的快速发展,AGNSS 将在高精度、低时延定位场景中发挥更大作用。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号